基于车队的车辆控制方法、装置、设备及存储介质与流程
本技术涉及无人驾驶领域,尤其涉及一种基于车队的车辆控制方法、装置、设备及存储介质。
背景技术:
1、无人驾驶技术在近年已经成为科研及商业领域内炙手可热的技术。有关无人驾驶对于各行各业生产力发展的促进,交通安全的改善,以及在当前全球新冠肺炎形势下“非接触运输”的展望,都是当下各方非常关注的技术发展方向。目前,国内外对汽车智能驾驶的研究术主要聚焦于单个车辆的智能驾驶技术。即车辆根据本车的车载传感器,包括视觉传感器,激光雷达,全球定位系统,惯性导航仪等,检测车辆周围环境从而做出行驶决策。
2、然而,我国幅员辽阔,道路形式纷繁复杂,即使是结构化道路亦由众多分支,岔路及狭窄交汇处构成。在复杂的道路条件下,单一车辆的决策能力往往受到很大限制。由于车载传感器的探测范围,频率及精度无法确保车辆全面实时获取车辆本身及周边环境的状态信息,因而难以做出更优的判断,不利于进一步提升车辆的行驶安全性。
技术实现思路
1、有鉴于此,本技术实施例提供了一种基于车队的车辆控制方法、装置、设备及存储介质,以解决现有技术中由于单一车辆决策能力受限,难以做出更优的判断或者难以做出保证安全的判断的问题。
2、本技术实施例的第一方面提供了一种基于车队的车辆控制方法,所述车队包括目标车辆,以及所述目标车辆所在场景中的相关车辆,所述方法包括:
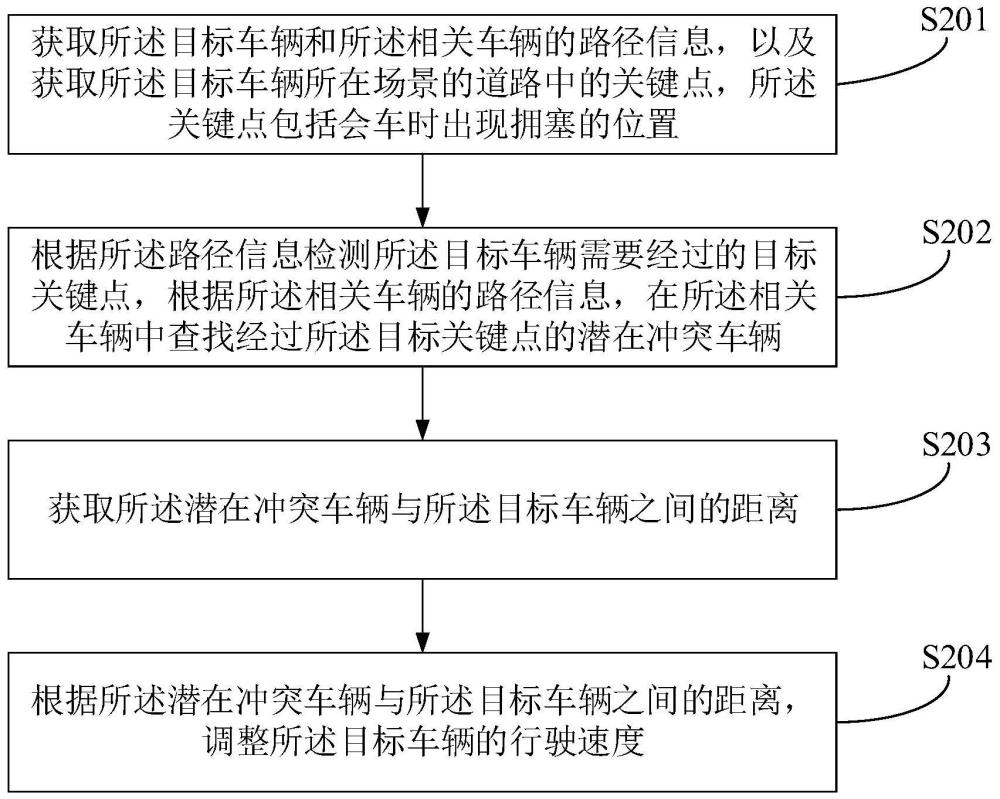
3、获取所述目标车辆和所述相关车辆的路径信息,以及获取所述目标车辆所在场景的道路中的关键点,所述关键点包括会车时出现拥塞的位置;
4、根据所述路径信息检测所述目标车辆需要经过的目标关键点,根据所述相关车辆的路径信息,在所述相关车辆中查找经过所述目标关键点的潜在冲突车辆;
5、获取所述潜在冲突车辆与所述目标车辆之间的距离;
6、根据所述潜在冲突车辆与所述目标车辆之间的距离,调整所述目标车辆的行驶速度。
7、结合第一方面,在第一方面的第一种可能实现方式中,根据所述相关车辆的路径信息,在所述相关车辆中查找经过所述目标关键点的潜在冲突车辆,包括:
8、根据所述相关车辆的路径信息,确定当前位置的上一关键点为所述目标关键点的相关车辆为潜在冲突车辆;
9、根据所述相关车辆的路径信息,确定当前行驶至所述目标关键点的相关车辆为潜在冲突车辆。
10、结合第一方面,在第一方面的第二种可能实现方式中,获取所述潜在冲突车辆与所述目标车辆之间的距离,包括:
11、如果所述潜在冲突车辆的上一关键点与所述目标车辆的上一关键点相同,且所述潜在冲突车辆与所述目标关键点的距离小于所述目标车辆与所述目标关键点的距离,获取所述潜在冲突车辆与所述目标车辆之间的距离;
12、如果所述潜在冲突车辆的上一关键点与所述目标车辆的上一关键点不同,且所述潜在冲突车辆与所述目标关键点的距离小于所述目标车辆与所述目标关键点的距离,获取所述潜在冲突车辆与所述目标关键点之间的第一距离,以及获取所述目标车辆与所述目标关键点之间的第二距离,根据所述第一距离与所述第二距离的差值,作为所述目标车辆所述潜在冲突车辆之间的距离;
13、如果所述潜在冲突车辆的上一关键点为所述目标车辆在接下来的移动路径中需要经过的目标关键点,确定所述潜在冲突车辆与其上一关键点之间的第三距离,以及确定所述目标车辆与所述目标关键点之间的第四距离,根据所述第三距离和所述第四距离之和确定所述潜在冲突车辆与所述目标车辆之间的距离。
14、结合第一方面,在第一方面的第三种可能实现方式中,根据所述潜在冲突车辆与所述目标车辆之间的距离,调整所述目标车辆的行驶速度,包括:
15、确定所述潜在冲突车辆与所述目标车辆之间的距离与预设的安全距离的差值,所述安全距离为车辆之间的安全行驶时的最小间隔距离;
16、根据所述差值和预定的比例系数,在预设的参考行驶速度的基础上,调节所述目标车辆的行驶速度。
17、结合第一方面的第三种可能实现方式,在第一方面的第四种可能实现方式中,根据所述差值和预定的比例系数,在预设的参考行驶速度的基础上,调节所述目标车辆的行驶速度,包括:
18、根据公式:vtarget=vref+kd·(dmin-dref)调节所述目标车辆的行驶速度,其中,vref为目标车辆的参考行驶速度,vtarget为目标车辆的行驶速度,kd为正的比例调节系数,dref为车辆行驶时的安全间距,dmin为潜在冲突车辆与所述目标车辆之间的距离的最小值。
19、结合第一方面,在第一方面的第五种可能实现方式中,在根据所述潜在冲突车辆与所述目标车辆之间的距离,调整所述目标车辆的行驶速度之后,所述方法还包括:
20、按照预定的时间间隔更新所述目标车辆对应的潜在冲突车辆,获取更新后的潜在冲突车辆与所述目标车辆之间的距离,根据所述距离调整所述目标车辆的行驶速度,直到所述目标车辆到达目的地。
21、结合第一方面,在第一方面的第六种可能实现方式中,根据所述潜在冲突车辆与所述目标车辆之间的距离,调整所述目标车辆的行驶速度,包括:
22、将所述潜在冲突车辆与所述目标车辆之间的距离与预先设定的距离阈值进行比较,选择小于所述距离阈值的距离调整所述目标车辆的行驶速度;
23、或者,将所述潜在冲突车辆与所述目标车辆之间的距离中的最小距离调整所述目标车辆的行驶速度。
24、本技术实施例的第二方面提供了一种基于车队的车辆控制装置,所述车队包括目标车辆,以及所述目标车辆所在场景中的相关车辆,所述装置包括:
25、信息获取单元,用于获取所述目标车辆和所述相关车辆的路径信息,以及获取所述目标车辆所在场景的道路中的关键点,所述关键点包括会车时出现拥塞的位置;
26、潜在冲突车辆确定单元,用于根据所述路径信息检测所述目标车辆需要经过的目标关键点,根据所述相关车辆的路径信息,在所述相关车辆中查找经过所述目标关键点的潜在冲突车辆;
27、距离获取单元,用于获取所述潜在冲突车辆与所述目标车辆之间的距离;
28、行驶速度调整单元,用于根据所述潜在冲突车辆与所述目标车辆之间的距离,调整所述目标车辆的行驶速度。
29、本技术实施例的第三方面提供了基于车队的车辆控制设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面任一项所述方法的步骤。
30、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述方法的步骤。
31、本技术实施例与现有技术相比存在的有益效果是:本技术实施例通过获取车队中的目标车辆和相关车辆的路径信息,以及目标车辆所在场景中的道路的关键点,实时检测根据目标车辆在当前需要经过的目标关键点,根据相关车辆的路径信息和所述目标关键点,确定在所述相关车辆中,与所述目标车辆可能在所述目标关键点存在潜在冲突的潜在冲突车辆,根据潜在车辆所述目标车辆之间的距离对所述目标车辆的行驶速度进行调整,从而可以基于车队的目标车辆与潜在冲突车辆之间的距离来调整所述目标车辆的移动速度,减少所述目标车辆与潜在冲突车辆出现冲突的几率,有利于优化车辆行驶。
- 还没有人留言评论。精彩留言会获得点赞!