一种智能跟随充电设备及其跟随方法与流程
1.本发明涉及电动汽车充电设备技术领域,具体为跟随充电设备及其跟随方法。
背景技术:
2.随着社会的发展,市场上出现越来越多对电动汽车充电的设备,现用设备多数是静态充电设备,而电动汽车静态充电需要大量的停车位,尤其是在高速公路上,无法实现这一基本条件,充电设备的缺陷成为限制电动车大发展的瓶颈之一;
3.当前的智能跟随技术主要分为以下几种:
4.(1)基于视觉的人体检测跟踪跟随技术,该方法需要对人体进行实时的检测和跟踪,图像处理量巨大,一般计算机无法完成运算,对计算设备的算力要求较高,计算平台成本高,实时性较差且受光线条件限制较大;
5.(2)基于定向信号源的智能跟随技术,该跟随方式会受到信号源信号的干扰,且在工作时,信号发射源必须要时刻对准信号接收端,当信号发射端被遮挡的时候,会跟随失败,从而在实际的运行中,信号发射端常常受到障碍物和人体自身的遮挡,所以该跟随技术用户体验不佳;
6.从而当前的跟随技术主要存在以下缺点:跟随容易因为跟随目标被障碍物遮挡而导致跟随失败,使用不够方便灵活,无法适应复杂场景,在跟随过程异常时,缺少简单直观的人工控制方式,缺乏安全感,跟随设备与使用人员是分离状态,从而设备脱离使用人员,使用人员不能及时了解,因此,当前需要一种实现成本低、跟随目标定位不受障碍物影响、使用方便灵活、跟随异常时能简单直观地进行人工控制、具有安全感的智能跟随技术,为此,提出一种智能跟随充电设备及其跟随方法。
技术实现要素:
7.本发明的目的在于提供一种智能跟随充电设备及其跟随方法,以解决上述背景技术中提出的需要一种实现成本低、跟随目标定位不受障碍物影响、使用方便灵活、跟随异常时能简单直观地进行人工控制、具有安全感的智能跟随技术的问题。
8.为实现上述目的,本发明提供如下技术方案:一种智能跟随充电设备,包括跟随充电机主体,所述跟随充电机主体包括感应模组、跟随反馈模组和充电运行组件,所述感应模组包括单片机、摄像头、陀螺仪、拉力传感器和位移传感器,所述摄像头、陀螺仪、拉力传感器与位移传感器的电性输出端通过导线电性连接于所述单片机的电性输入端,所述感应模组安装于所述跟随充电机主体的内部;
9.所述跟随反馈模组包括小型计算机组、无线定位系统、语音交互系统、灯光警报器和扬声警报器;
10.所述无线定位系统的电性输出端通过导线电性连接于所述小型计算机组的电性输入端,所述语音交互系统的信号输出端通过无线电分别信号连接于所述小型计算机组和灯光警报器的信号接收端,所述灯光警报器与所述扬声警报器通过导线交互连接,所述跟
随反馈模组安装于所述跟随充电机主体的内部。
11.作为本技术方案的进一步优选的:所述充电运行组件包括固定支架、馈线轨道、回流线轨道、取电轮、自动伸缩电缆线、充电枪、随动轮、回流导线和电机;
12.所述固定支架的顶端分别安装有馈线轨道和回流线轨道,所述取电轮安装于所述馈线轨道的外部,且所述取电轮的外侧安装有自动伸缩电缆线,所述自动伸缩电缆线远离取电轮的一端安装有充电枪,所述电机的输出轴转动连接于取电轮的内部,通过馈线轨道和回流线轨道可以有效保障各轮子在其外部的稳定运行且保证电力的稳定运输,而随动轮固定连接取电轮后,可以进一步增强各轮子之间的稳定运行。
13.作为本技术方案的进一步优选的:所述随动轮安装于所述回流导线的外部,且所述随动轮的外侧安装有回流导线,所述充电运行组件安装于所述跟随充电机主体的内部,所述随动轮与所述取电轮固定连接,回流导线的设置可以有效起到磁屏蔽的作用。
14.作为本技术方案的进一步优选的:所述摄像头的电性输出端通过导线电性连接于所述位移传感器的电性输入端,所述位移传感器的电性输出端通过导线分别电性连接于所述小型计算机组和灯光警报器的电性输入端,通过上述运行,摄像头可以将采集的图片或影像传递给位移传感器,从而借助位移传感器进行相应的信息处理工作,而位移传感器与小型计算机组和灯光警报器的连接便于将处理后的信息进行上传以及经得出的处理信息,及时的对驾驶员进行的提醒和预警。
15.一种智能跟随充电设备的跟随方法,包括以下步骤:
16.s1、首先通过充电枪连接电动汽车,再利用设置的自动伸缩电缆线将经变压器调节后输送到馈线轨道内的电压接通到电动汽车上,从而进行电力补给;
17.s2、电力进行补给后,单片机启动电机运行,从而运行的电机经其输出轴带动取电轮运行在馈线轨道上,且由于取电轮与随动轮固定连接,以此随动轮进行联动,运行在设置的回流线轨道上;
18.s3、通过设置的摄像头实时拍摄跟随充电机主体前方的画面,并将拍摄的图片或影像传递给单片机,从而单片机对摄像头拍摄的图片或影像进行图像处理,准确检测出自动伸缩电缆线的长度和位置;
19.s4、通过设置的拉力传感器感知自动伸缩电缆线的拉动动作和拉力相对于跟随充电机主体前方的角度,并实时将测量结果传送给单片机,而借由设置的陀螺仪用于测量跟随充电机主体当前朝向的绝对角度,并将数据同步到单片机,以此经单片机控制跟随充电机主体的转向工作;
20.s5、通过位移传感器实时检测跟随充电机主体与电动汽车之间的位置,并实时将检测信息传递给小型计算机组,检测位移传感器自身预设有既定阈值;
21.当检测数据大于位移传感器的既定阈值时,会触发跟随反馈组件内部的灯光警报器,并由于灯光警报器与扬声警报器通过导线交互连接,以此扬声警报器也会进行警报联动;
22.当检测数据小于位移传感器的既定阈值时,位移传感器会自动进入下一回合的持续检测工作;
23.s6、通过设置的无线定位系统可通过域网对设置好的标点进行精准定位,并实时将标点信息传递给小型计算机组,而小型计算机组在接收到信息后会同步反馈到人工管理
后台;
24.s7、利用设置的语音交互系统可以使后台管理人员与使用对应跟随充电机主体的电动汽车驾驶员取得联系,从而对驾驶员进行合理的指挥或提醒;
25.s8、基于s6中无线定位系统所检测的信息数据,小型计算机组会反馈到人工管理后台进行实施跟踪;
26.当检测到标点移动过快时,后台管理人员经小型计算机组连接的语音交互系统与电动汽车驾驶员取得联系,进行安全驾驶提醒,并且同时触发灯光警报器,由于灯光警报器与扬声警报器通过导线相互交互,以此扬声警报器也会进行警报联动。
27.作为本技术方案的进一步优选的:在s1中,变压器可以将高电压降压至380伏至900伏电压输送到馈线轨道上,在s2中,随动轮安装有刹车装置,从而可以确保对跟随充电机主体作出快速反应。
28.作为本技术方案的进一步优选的:在s3中,摄像头采用自动跟踪摄像机,在s6中,无线定位系统采用无线局域网定位中的无线uwb定位技术,采用的自动跟踪摄像机可以在物体移动时跟着移动捕捉图片或影像,也可以识别监控范围内物体运动,并自动移动物体进行追踪,记录的信息都可以清晰的上传到单片机,而通过无线uwb定位技术,其采用uwb作为超宽带无载波,使用短的能量脉冲序列,具有功耗低、抗干扰能力强、定位精度高的特性。
29.作为本技术方案的进一步优选的:在s7中,语音交互系统采用无线蓝牙连接,通过蓝牙设备使用无线电波连接手机或电脑,相互交流时,通过配对创建网络环境,以跟随充电机主体作为主设备,经跟随充电机主体所连接的其它设备作为从设备,主设备与从设备网络环境创建成功后,可以实现后台管理人员与电动汽车驾驶员之间的沟通交流。
30.与现有技术相比,本发明的有益效果是:
31.1、本发明通过充电枪连接电动汽车,利用自动伸缩电缆线将电压接通到电动汽车,从而进行电力补给,再借由单片机启动电机运行,使电机带动取电轮运行在馈线轨道上,而取电轮连接的随动轮进行联动,运行在回流线轨道,设置的馈线轨道和回流线轨道有效保障各轮子在其外部的稳定运行,且可以保证电力的稳定运输,随动轮固定连接取电轮后,还可以进一步增强各轮子之间的稳定运行,而设置的回流导线可以有效起到磁屏蔽的作用,大大提高了设备整体的抗干扰效果,并在跟随充电机主体的承载下,实现了跟随运行充电,从而解决了电动汽车静态充电需要大量的停车位的问题;
32.2、本发明通过摄像头实时拍摄跟随充电机主体前方的画面,而拍摄的图片或影像传递给单片机,从而单片机进行图像处理,准确检测出自动伸缩电缆线的长度和位置,而拉力传感器可感知自动伸缩电缆线的拉动动作和拉力相对于跟随充电机主体前方的角度,再借由陀螺仪测量跟随充电机主体当前朝向的绝对角度,以此经单片机控制跟随充电机主体的转向工作,从而可以有效保障跟随运行的稳定效果;
33.3、本发明通过位移传感器实时检测跟随充电机主体与电动汽车之间的位置,检测位移传感器自身预设有既定阈值,当检测数据大于位移传感器的既定阈值时,会触发灯光警报器与扬声警报器,以此对驾驶人员进行提醒,且进一步利用无线定位系统进行精准定位,采用的uwb作为超宽带无载波,使用短的能量脉冲序列,具有功耗低、抗干扰能力强、定位精度高的特性,从而两种定位监测方式相配合,可以有效解决障碍物对于跟随目标定位的影响,且各组件运行之间方便灵活,提高运行效率;
34.4、本发明通过小型计算机组,将接收到的各项信息同步反馈到人工管理后台,并利用设置的语音交互系统使后台管理人员与使用对应跟随充电机主体的电动汽车驾驶员取得联系,本发明语音交互系统采用无线蓝牙连接,通过蓝牙设备使用无线电波连接手机或电脑,以跟随充电机主体作为主设备,经跟随充电机主体所连接的其它设备作为从设备,主设备与从设备之间构建网络环境,可以实现后台管理人员与电动汽车驾驶员之间的沟通交流,从而后台管理人员可以对驾驶员进行合理的指挥或提醒,以此实现设备与驾驶员之间的沟通交流,并借由小型计算机组实现人工对设备的干预控制,提高了设备整体的安全感,避免了跟随过程异常时出现不可控的情况;
35.5、本发明可通过位移传感器和无线定位系统触发设置的灯光警报器和扬声警报器,以此可及时有效的对电动汽车驾驶人员进行提醒和预警。
附图说明
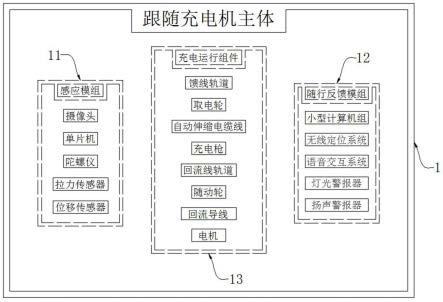
36.图1为本发明的跟随充电机主体示意图;
37.图2为本发明的感应模组与跟随反馈模组运行示意图;
38.图3为本发明的感应模组与充电运行组件运行示意图;
39.图4为本发明的位移传感器运行示意图。
40.图中:1、跟随充电机主体;11、感应模组;111、单片机;112、摄像头;113、陀螺仪;114、拉力传感器;115、位移传感器;12、跟随反馈模组;121、小型计算机组;122、无线定位系统;123、语音交互系统;124、灯光警报器;125、扬声警报器;13、充电运行组件;131、固定支架;132、馈线轨道;133、回流线轨道;134、取电轮;135、自动伸缩电缆线;136、充电枪;137、随动轮;138、回流导线;139、电机。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.实施例
43.请参阅图1-图4,本发明提供一种技术方案:一种智能跟随充电设备,包括跟随充电机主体1,跟随充电机主体1包括感应模组11、跟随反馈模组12和充电运行组件13,感应模组11包括单片机111、摄像头112、陀螺仪113、拉力传感器114和位移传感器115,摄像头112、陀螺仪113、拉力传感器114与位移传感器115的电性输出端通过导线电性连接于单片机111的电性输入端,感应模组11安装于跟随充电机主体1的内部;
44.跟随反馈模组12包括小型计算机组121、无线定位系统122、语音交互系统123、灯光警报器124和扬声警报器125;
45.无线定位系统122的电性输出端通过导线电性连接于小型计算机组121的电性输入端,语音交互系统123的信号输出端通过无线电分别信号连接于小型计算机组121和灯光警报器124的信号接收端,灯光警报器124与扬声警报器125通过导线交互连接,跟随反馈模组12安装于跟随充电机主体1的内部。
46.本实施例中,具体的:充电运行组件13包括固定支架131、馈线轨道132、回流线轨道133、取电轮134、自动伸缩电缆线135、充电枪136、随动轮137、回流导线138和电机139;
47.固定支架131的顶端分别安装有馈线轨道132和回流线轨道133,取电轮134安装于馈线轨道132的外部,且取电轮134的外侧安装有自动伸缩电缆线135,自动伸缩电缆线135远离取电轮134的一端安装有充电枪136,电机139的输出轴转动连接于取电轮134的内部,通过设置的馈线轨道132和回流线轨道133,一方面有效保障各轮子在其外部的稳定运行,另一方面用于保证电力的稳定运输,而随动轮137固定连接取电轮134后,可以进一步增强各轮子之间的稳定运行。
48.本实施例中,具体的:随动轮137安装于回流导线138的外部,且随动轮137的外侧安装有回流导线138,充电运行组件13安装于跟随充电机主体1的内部,随动轮137与取电轮134固定连接,通过回流导线138的设置可以有效起到磁屏蔽的作用。
49.本实施例中,具体的:摄像头112的电性输出端通过导线电性连接于位移传感器115的电性输入端,位移传感器115的电性输出端通过导线分别电性连接于小型计算机组121和灯光警报器124的电性输入端,通过上述运行,摄像头112可以将采集的图片或影像传递给位移传感器115,从而借助位移传感器115进行相应的信息处理工作,而位移传感器115与小型计算机组121和灯光警报器124的连接,一方面便于将处理后的信息进行上传,另一方面可以经得出的处理信息,及时的对驾驶员进行的提醒和预警。
50.一种智能跟随充电设备的跟随方法,包括以下步骤:
51.s1、首先通过充电枪136连接电动汽车,再利用设置的自动伸缩电缆线135将经变压器调节后输送到馈线轨道132内的电压接通到电动汽车上,从而进行电力补给;
52.s2、电力进行补给后,单片机111启动电机139运行,从而运行的电机139经其输出轴带动取电轮134运行在馈线轨道132上,且由于取电轮134与随动轮137固定连接,以此随动轮137进行联动,运行在设置的回流线轨道133上;
53.s3、通过设置的摄像头112实时拍摄跟随充电机主体1前方的画面,并将拍摄的图片或影像传递给单片机111,从而单片机111对摄像头112拍摄的图片或影像进行图像处理,准确检测出自动伸缩电缆线135的长度和位置;
54.s4、通过设置的拉力传感器114感知自动伸缩电缆线135的拉动动作和拉力相对于跟随充电机主体1前方的角度,并实时将测量结果传送给单片机111,而借由设置的陀螺仪113用于测量跟随充电机主体1当前朝向的绝对角度,并将数据同步到单片机111,以此经单片机111控制跟随充电机主体1的转向工作;
55.s5、通过位移传感器115实时检测跟随充电机主体1与电动汽车之间的位置,并实时将检测信息传递给小型计算机组121,检测位移传感器115自身预设有既定阈值;
56.当检测数据大于位移传感器115的既定阈值时,会触发跟随反馈组件12内部的灯光警报器124,并由于灯光警报器124与扬声警报器125通过导线交互连接,以此扬声警报器125也会进行警报联动;
57.当检测数据小于位移传感器115的既定阈值时,位移传感器115会自动进入下一回合的持续检测工作;
58.s6、通过设置的无线定位系统122可通过域网对设置好的标点进行精准定位,并实时将标点信息传递给小型计算机组121,而小型计算机组121在接收到信息后会同步反馈到
人工管理后台;
59.s7、利用设置的语音交互系统123可以使后台管理人员与使用对应跟随充电机主体1的电动汽车驾驶员取得联系,从而对驾驶员进行合理的指挥或提醒;
60.s8、基于s6中无线定位系统122所检测的信息数据,小型计算机组121会反馈到人工管理后台进行实施跟踪;
61.当检测到标点移动过快时,后台管理人员经小型计算机组121连接的语音交互系统123与电动汽车驾驶员取得联系,进行安全驾驶提醒,并且同时触发灯光警报器124,由于灯光警报器124与扬声警报器125通过导线相互交互,以此扬声警报器125也会进行警报联动。
62.本实施例中,具体的:在s1中,变压器可以将高电压降压至400伏或者900伏电压输送到馈线轨道132上,在s2中,随动轮137安装有刹车装置,从而可以确保对跟随充电机主体1作出快速反应。
63.本实施例中,具体的:在s3中,摄像头112采用自动跟踪摄像机,在s6中,无线定位系统122采用无线局域网定位中的无线uwb定位技术。
64.本实施例中,具体的:采用的自动跟踪摄像机可以在物体移动时跟着移动捕捉图片或影像,也可以识别监控范围内物体运动,并自动移动物体进行追踪,记录的信息都可以清晰的上传到单片机111,而通过无线uwb定位技术,其采用uwb作为超宽带无载波,使用短的能量脉冲序列,具有功耗低、抗干扰能力强、定位精度高的特性。
65.本实施例中,具体的:在s7中,语音交互系统123采用无线蓝牙连接,通过蓝牙设备使用无线电波连接手机或电脑,相互交流时,通过配对创建网络环境,以跟随充电机主体1作为主设备,经跟随充电机主体1所连接的其它设备作为从设备,主设备与从设备网络环境创建成功后,可以实现后台管理人员与电动汽车驾驶员之间的沟通交流。
66.工作原理或者结构原理,使用时,电动汽车驾驶员先将充电枪136连接电动汽车,经变压器将高电压降压至380伏至900伏电压输送到馈线轨道132上,再利用设置的自动伸缩电缆线135将电压接通到电动汽车上,从而进行电力补给,电力进行补给后,单片机111启动电机139运行,从而运行的电机139经其输出轴带动取电轮134运行在馈线轨道132上,且由于取电轮134与随动轮137固定连接,以此随动轮137进行联动,运行在设置的回流线轨道133上;
67.通过设置的摄像头112实时拍摄跟随充电机主体1前方的画面,并将拍摄的图片或影像传递给单片机111,从而单片机111对摄像头112拍摄的图片或影像进行图像处理,准确检测出自动伸缩电缆线135的长度和位置,而通过设置的拉力传感器114感知自动伸缩电缆线135的拉动动作和拉力相对于跟随充电机主体1前方的角度,并实时将测量结果传送给单片机111,而借由设置的陀螺仪113用于测量跟随充电机主体1当前朝向的绝对角度,并将数据同步到单片机111,以此经单片机111控制跟随充电机主体1的转向工作;
68.通过位移传感器115实时检测跟随充电机主体1与电动汽车之间的位置,并实时将检测信息传递给小型计算机组121,检测位移传感器115自身预设有既定阈值,当检测数据大于位移传感器115的既定阈值时,会触发跟随反馈组件12内部的灯光警报器124,并由于灯光警报器124与扬声警报器125通过导线交互连接,以此扬声警报器125也会进行警报联动,当检测数据小于位移传感器115的既定阈值时,位移传感器115会自动进入下一回合的
持续检测工作;
69.通过设置的无线定位系统122可通过域网对设置好的标点进行精准定位,并实时将标点信息传递给小型计算机组121,而小型计算机组121在接收到信息后会同步反馈到人工管理后台,利用设置的语音交互系统123可以使后台管理人员与使用对应跟随充电机主体1的电动汽车驾驶员取得联系,从而对驾驶员进行合理的指挥或提醒,基于s6中无线定位系统122所检测的信息数据,小型计算机组121会反馈到人工管理后台进行实施跟踪,当检测到标点移动过快时,后台管理人员经小型计算机组121连接的语音交互系统123与电动汽车驾驶员取得联系,进行安全驾驶提醒,并且同时触发灯光警报器124,由于灯光警报器124与扬声警报器125通过导线相互交互,以此扬声警报器125也会进行警报联动。
70.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1