一种整车电量融合导航路径约束驾驶行为的系统及方法与流程
1.本发明涉及新能源汽车领域,具体是一种整车电量融合导航路径约束驾驶行为的系统及方法。
背景技术:
2.随着科技的发展,新能源汽车对智能化要求日益提高,对于电动车续航里程,大多数的续航里程计算是根据用户的行驶速度的电量消耗来计算,这种计算模式受驾驶者及道路信息的影像严重,不能解决驾驶者的里程焦虑。
技术实现要素:
3.本发明要解决的技术问题就是克服以上的技术缺陷,提供一种可以根据导航路径,可以计算出行驶路程中以合适的速度完成行驶、可以查看整车的电量是否可以支撑完成行驶及行驶完成后车辆剩余电量的整车电量融合导航路径约束驾驶行为的系统及方法。
4.为了解决上述问题,本发明的技术方案为:一种整车电量融合导航路径约束驾驶行为的系统,包括控制、接受及处理信息的计算控制模块,所述计算控制模块连接有对行驶路线信息及整车电量信息的采集的信息采集模块、向用户展示控制模块计算结果的信息展示模块及执行控制模块计算出的动力参数值的执行模块。
5.进一步,所述计算控制模块包括整车控制系统vcu。
6.进一步,所述信息采集模块包括电池管理系统bms、车载娱乐系统ivi及车载通信系统t-box。
7.进一步,所述车载娱乐系统ivi还用于信息展示模块。
8.进一步,所述执行模块包括驱动系统mcu。
9.一种整车电量融合导航路径约束驾驶行为的方法,包括以下步骤:(1) 用户确认进行导航,从信息采集模块中车载娱乐系统ivi界面输入目的地信息,信息采集模块中车载娱乐系统ivi导航系统结合信息采集模块中通信系统t-box的定位信息,对行驶路线上的信号灯、车流及坡度进行整合,通过整车can网络发送到整车上;(2) 计算控制模块中整车控制系统vcu结合信息采集模块中电池管理系统bms与车载娱乐系统ivi发送的整车电量信息及导航路线信息,通过查询调用前期的执行模块中驱动系统mcu标定数据,假设以路况信息取中间值的模糊算法,计算出以何种车速行驶,行驶时间,总的消耗电量,对比当前信息采集模块中电池管理系统bms的剩余电量,是否满足行驶需求及行驶完剩余的电量信息,计算控制模块中整车控制系统vcu通过整车can通信将计算结果反馈给信息采集模块中车载娱乐系统ivi;(3) 用户结合自己的驾驶需求,通过信息展示模块中车载娱乐系统ivi驾驶模式选择界面,选择计算控制模块中的整车控制系统vcu反馈给车载娱乐系统ivi 的驾驶模式信息,确认选择,车载娱乐系统ivi 将选择结果通过can通信发送给整车控制系统vcu;(4) 计算控制模块中的整车控制系统vcu通过用户确认的驾驶模式,调出前期计
算的对应的驾驶模式对应的动力参数,控制整车的动力参数进行修改,执行模块中的驱动系统mcu以选择的驾驶模式参数进行执行,整车进入导航模式,以确保电量消耗满足客户需求;(5) 行驶过程中,信息采集模块实时对导航路径信息进行采集,并与正在运行的数据进行比对,若误差不大于阈值,将不处理;若误差大于阈值,则重复进行(2)、(3)步骤,等用户确认信息结果,计算控制模块中整车控制系统vcu和执行模块中驱动系统mcu以信息展示模块中车载娱乐系统ivi 4反馈结果确认是按照原驾驶模式执行还是按照(4)步骤执行。
10.本发明与现有的技术相比的优点在于:本发明根据系统提前根据出发地至目的地的道路信息及整车电量状况,计算出多种驾驶模式及在某种驾驶模式下整车是否能行驶到目的地及所剩余的电量,行驶途中并根据实时路况,计算校正当前选择的驾驶模式。以最直观的方式呈现给驾驶者,让驾驶者清楚当前的剩余电量,是否满足此次出行需求并以何种驾驶模式可以最大化的满足此次行驶需求。
附图说明
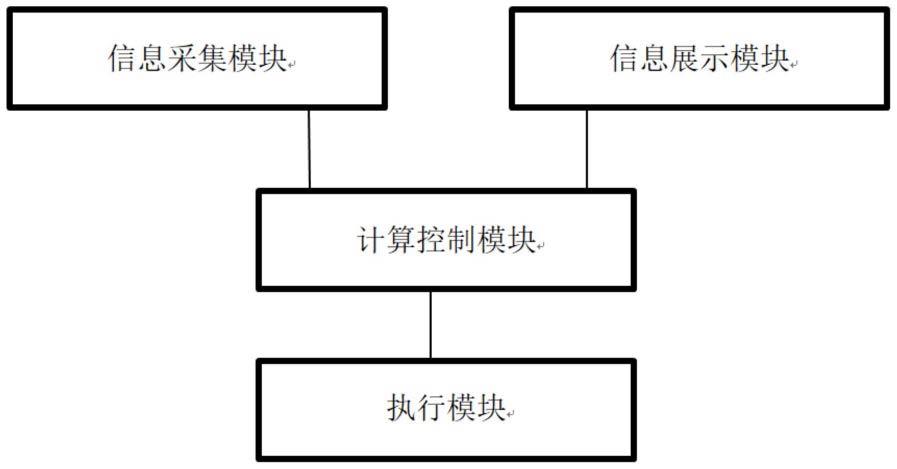
11.图1是本发明的模块关系图;图2是本发明的零部件模块架构图。
具体实施方式
12.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
实施例
13.如图1所示,一种整车电量融合导航路径约束驾驶行为的系统,包括控制、接受及处理信息的计算控制模块,计算控制模块连接有对行驶路线信息及整车电量信息的采集的信息采集模块、向用户展示控制模块计算结果的信息展示模块及执行控制模块计算出的动力参数值的执行模块,信息采集模块、信息展示模块、计算控制模块及执行模块4之间通过通信线束连接,可以进行相互信息交互。
14.信息采集模块的作用主要是对车用户的行驶路线信息及整车电量信息的采集,用以提供给控制模块进行驾驶模型的计算;信息展示模块的作用是向用户展示控制模块的计算结果,供用户进行选择确认,让用户清楚知道行驶目的地与当前剩余电量的满足关系;控制模块的主要任务包括控制、接收及处理信息采集模块的信号、计算分析出当前满足驾驶需求的各种驾驶模型及剩余电量及控制修改整车的驾驶模式,限制驾驶动力参数;执行模块主要任务执行控制模块计算出的动力参数值,驱动车辆行驶。
15.如图1-2所示,计算控制模块包括整车控制系统vcu,整车控制系统vcu安装在车仓内部,检测整车状况,与整车零部件通信,用于计算选择及控制整车驾驶模式。
16.如图1-2所示,信息采集模块包括电池管理系统bms、车载娱乐系统ivi及车载通信
系统t-box,车载娱乐系统ivi分别与整车控制系统vcu、车载通信系统t-box进行相互之间的信息交互,车载娱乐系统ivi通过驾驶者输入的目的地信息,根据车载通信系统t-box提供的当前位置的定位,车载娱乐系统ivi通过内部自带导航系统,提供给整车控制系统vcu驾驶者行驶的道路信息,整车控制系统vcu通过提供的道路信息,计算出驾驶模式反馈给车载娱乐系统ivi,车载娱乐系统ivi展示给驾驶者用以选择,并将选择结果反馈给整车控制系统vcu执行控制,电池管理系统bms与整车控制系统vcu之间进行相互通信,对整车控制系统vcu提供当前车辆剩余电量及其他车身部件工作电流,用于整车控制系统vcu计算驾驶模式模型。
17.如图1-2所示,车载娱乐系统ivi还用于信息展示模块,通过计算出驾驶模式反馈给车载娱乐系统ivi,车载娱乐系统ivi展示给驾驶者用以选择。
18.如图1-2所示,执行模块包括驱动系统mcu,驱动系统mcu与整车控制系统vcu进行相互信息交互,驱动系统mcu根据前期进行的动力标定,存储绘制出动力模型四维坐标(电压、电流、转速、扭矩)供整车控制系统vcu进行驾驶模式动力选择,并按照整车控制系统vcu指令进行动力输出。
19.在具体使用中:首先,根据车辆模型参数、电压、电机转速、扭矩等动力参数,可以计算分析得到这些应参数对应的驾驶模式车速的电量消耗数据,并将这些动力参数数据形成多维矩阵表的形式,生成二进制代码存储在整车控制单元vcu中,供整车控制单元vcu计算分析调用;其次,驾驶员通过车载娱乐系统ivi输入行驶目的地信息,自带导航系统规划最佳的导航路径,车载通信系统t-box确认导航定位信息及道路坡度信息进行采集,车载娱乐系统ivi将导航路线信息生成二进制代码供整车控制单元vcu分析计算;再次,整车控制单元vcu通过车载娱乐系统ivi提供的导航信息,并采集电池管理系统bms系统提供的剩余电量信息及目前整车其他零部件工作需求电量,计算多种驾驶模型;然后,车载娱乐系统ivi接收整车控制单元vcu提供的多种驾驶模型,并展现在屏幕上,供驾驶员选择;最后,整车控制单元vcu通过车载娱乐系统ivi反馈的驾驶者选择模式,将模式参数下发到整车,控制驱动系统mcu及电池管理系统bms按照模型参数指令输出驱动车辆行驶。
20.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1