用于处理地面输送机中障碍物的方法与流程
本发明涉及一种用于处理地面输送机中障碍物的方法,地面输送机包括至少一个传感器单元,传感器单元设置在地面输送机的主行进方向上并且设计用于:可以在预设的角度范围内检测障碍物。本发明还涉及一种地面输送机,其设计用于:在其运行期间执行这种方法。
背景技术:
1、在物流装置中的运输设备的日常使用中,会刚好在高峰时间愈发出现地面输送机和仓库配设之间、地面输送机和其他车辆或地面输送机和人员之间发生碰撞的情况。克服这种碰撞的一种方案可以在于:采用基于无线电的系统,借助该系统告知地面输送机存在障碍物。然而,在这种情况下表明:恰恰在自动化的车辆中,当前使用的传感装置导致不必要的制动,从而导致限制这种车辆的性能。
2、此外,为了也可以将没有这种无线电配设的物体和人员包括到保护设计中,已知的是:在地面输送机中使用传感器单元,传感器单元针对其周围环境检查障碍物并且尤其在主行进方向上被安装在地面输送机处且可以被对准。在此,展开所谓的保护区域,保护区域通常在水平面中刚刚位于行进地面上方。
3、如果这种传感器单元识别到物体,则可以产生相应的信息和/或可以触发车辆反应。在此,当然期望:相应的车辆仅当实际可能发生碰撞时、即在车辆的所设的移动区域内存在障碍物时才作出反应。因此,对于这种安全系统必须限定碰撞区或保护区。
4、在先前已知的用于限定碰撞区的方法中常见的是:对处理装置中将适当部位处的呈参数化几何区域形式的多个碰撞区进行固定编程,以便在这种地面输送机运行中可以对其进行访问。在此,于是,为了改进在相应地面输送机的不同速度和转向角度情况下的保护作用,在传感器单元的视野中在不同的固定编程的区域之间来回切换,以确定可能的碰撞风险并且同时将不相关的区域剔除。因此,例如,自主运输系统(agv-automated guidedvehicle自动引导车)的保护区域可以用作为这种地面输送机的安全系统,而其在本发明的范围内也可以以下面描述的方式在手动控制的地面输送机中使用。
5、然而,在这种情况下表明的是:这种区域的可能数量在系统侧是受限的,并且对于通过区域进行相应切换而言必须使用在处理装置的参与该方法的部件之间的物理连接,通常基于数字输入和数据连接。此外,必须对于每种可考虑的车辆类型并且对于每个系列的车辆产生一组区域,以及对于相关联的存储器上的相应的传感器单元可用。这意味着显著的建造耗费和成本耗费。
技术实现思路
1、因此,在本发明的范围内期望的是:使用一种改进的方案以限定在地面输送机中的保护区,该方案可以消除上述缺点。特别地,应使用一种方法,借助该方法在自动化的和手动控制的地面输送机中都可以避免由于与障碍物碰撞而引起的事故,其中障碍物可以例如通过在地面输送机的运行环境中的人、托盘或其他物体而形成。基于所使用的地面输送机类型,对于这种碰撞的原因可能在于人为错误,即例如由于地面输送机的驾驶员忽略了障碍物,或者在于在自动引导的地面输送机中在传感器数据处理中或在传感器本身中的错误。
2、然而,在使用这种保护区的情况下还表明的是:会出现各种情况,其中会发生对障碍物的误报识别,例如在手动操作的地面输送机在墙附近转弯行进的情况下和在对地面输送机的当前行进路线进行简单规划时预期其在未来可能会与墙发生碰撞,即使地面输送机的相关驾驶员已经对情况有控制并且会及时执行相应的反转向以结束转弯行进并随后例如平行于墙移动也如此。甚至同样在自动行进的地面输送机中也可以考虑相应的场景,由于在那里所计划的行进路线是确定性的,并且不必是针对人类操作员的行为,所以在这种情况下可以提前估计:可能违反保护区的情况是否是期望的行为,例如在上面提到的转弯行进示例的情境中,或者实际上是否担心与最初未预见的障碍物发生碰撞。
3、因此,关于此点需要辅助一种系统和相应的方法,借助其可以以改进的方式处理在这种地面输送机运行中所确定的障碍物,并且可以得出关于地面输送机的当前情况关于这种障碍物实际上有多成问题的结论,以便可以避免或完全排除对障碍物的误报的识别,而不对以下情况形成干预,其中,尤其是地面输送机的驾驶员对该情况具有控制并且其为没有风险的可预期的行为。
4、为了实现该目的,根据本发明提出一种用于处理地面输送机中障碍物的方法,地面输送机包括至少一个传感器单元,传感器单元设置在地面输送机的主行进方向上并且设计用于:可以在预设的角度范围内检测障碍物,该方法包括:借助于地面输送机的速度传感器或转向角传感器检测地面输送机的至少一个转向轮的当前速度和当前转向角,根据车辆平面图、当前速度和当前转向角计算预测的车辆轮廓,使得预测的车辆轮廓对应于在预设的时间段中待由地面输送机扫过的表面,评估在作为地面输送机的保护区的该预测的车辆轮廓内的由至少一个传感器单元提供的数据,并且在确定保护区中有障碍物的情况下,计算至两侧的相应转向角差,其中分别避免与障碍物发生碰撞;以及至少根据计算的转向角差、特别是根据转向角差限值对避免障碍物的当前难度进行分类,和/或根据计算的转向角差、特别是根据转向角差限值触发预设的措施。
5、通过根据本发明的方法实现:根据难度对当前行进情况进行分类,在该当前行进情况中,在地面输送机的保护区中确定有障碍物,该难度至少是基于为了避开障碍物会需要的转向角差,和/或直接通过触发措施自动地干预车辆的运行。相应地,在上文已经提到的在墙附近转弯行进的示例中,可以确定:即使在远离墙的方向上在转向角差很小的情况下已经有可能避免碰撞,使得这种情况可以被分类为低难度和/或可以决定无需采取干预车辆运行的措施。在此,转向角差限值的在该上下文中可能的使用实现的是:在这种情况下,以相对简单的方式和方法对人类驾驶员所期望的和所不期望的违反保护区域的情况进行区分。在此,该限值可以与当前速度、当前转向角、驾驶员的经验水平等相关。
6、表明了:在此可以使用两个转向角差中较小的转向角差用于对当前难度进行分类,这是因为通常会基于:会朝相应的侧发生规避运动,这对应于这种车辆的人类驾驶员的典型行为。相应地,在上面提到的在墙区域中的转弯行进的示例中会不相关的是:对于朝墙的方向避开障碍物所需的转向角差显著更大,这是因为通常会发生远离墙避开。
7、虽然对地面输送机运行中的当前难度进行分类也仅用于收集数据以评价驶过的物流环境或者类似的情况,但在根据本发明的方法中也可以根据当前难度在地面输送机处采取预设的措施,以便可以直接提供用于提高的运行安全性的辅助系统并且直接创建在难度和相应的措施之间的有效关联。在此,如更下文中还将进行描述的,预设的措施的执行的方式和方法还可以与不同的其他的参数相关。
8、这种预设的措施的示例可以包括降低地面输送机的当前速度和/或最大速度,使得因此限制地面输送机的可到达速度或者将其立即自动制动,例如根据所求出的当前难度来执行。特别地,这种最大速度或当前速度的降低可以以如下方式执行,即在任何情况下都可以在障碍物前完全停住,其中这是迭代过程,该迭代过程在障碍物上停住行进时最终引起车辆的完全停住。相反,如果确定障碍物不再处于保护区中,例如通过避开该障碍物或障碍物本身已被移出保护区,则可以取消相应的措施,并且车辆再次加速和/或再次提高其最大速度。
9、附加的或替代的预设措施可以包括向操作员输出相应的消息,例如在显示器处的警告或声信号。尽管在此在手动控制的车辆中可以主要考虑地面输送机的驾驶员,但显然在遥控或自动引导的车辆的情况下,可以考虑输出给远程操作员或控制台以告知在那里工作的操作员。
10、原则上,关于输出的类型可以考虑不同的处理方式,因此例如当存在具有特定难度的情况时,可以在操作员的视野中仅点亮警告灯或者示出声警告信号,或者可以在专用的显示设备处给操作员提供其他的信息,例如地图视图,在地图视图上将相应的障碍物与车辆一起以相对的局部关系与警告一起显示出来。
11、根据本发明,在当前的方法中为了对当前难度进行分类和/或为了触发预设的措施还可以考虑其他参数,尤其是地面输送机的当前转向角、地面输送机的当前速度、地面输送机的驾驶员的经验水平和/或计算出的与当前转向角的转向角差。为此的示例可以在于:在当前直线移出和在相应保护区内识别到障碍物时,总是可以执行分类,该分类会随之带来直接的预设措施,这是因为会基于:不应会出现地面输送机迎面驶向障碍物的情况。同样地,在当前速度可能较高可能更早且更强烈地制动的情况下,可以考虑:由于出现的离心力,可以更容易朝与当前弯道运动相反的方向避开,进而可以随之带来更低的难度。此外,可以考虑的是:在车辆已经驶过弯道的情况下会更有意义的是:通过直线转向来引起避开,即使转向角差在此大于在朝弯道内进行避开机动的情况下的转向角差时也如此,这是因为在此朝弯道内的方向的转向一定程度可以表示车辆反向,而在另一方向上车辆的直线转向实现避开。此外,在转弯行进时可能更现实的是:所寻求的行进方向与以较小半径的转弯行进相比更多地指向直线移出的方向,例如在转弯行进时直线转向延迟的情况下。
12、驾驶员的经验水平可以包括到对当前难度等级的分类和/或预设措施的触发中,使得可以以适当的方式存储关于经验水平的相应数据,并且然后例如在驾驶员具有较多经验的情况下与在经验较少的驾驶员的情况下相比在检测到障碍物的情况下采取不那么强的措施,这是因为这两名驾驶员对于避免障碍物和在应对潜在危急情况方面具有不同良好程度的能力。同样地,在经验较多的驾驶员的情况下也可以容忍一定情况,即评价为低难度或完全没有难度,该低难度或完全没有难度在经验较少的驾驶员的情况下已经会被评价为较高难度或会触发措施。具体实施的措施也可以以类似的方式根据经验水平来做出,例如通过在经验较少的驾驶员的情况下提供更强自动制动,以便在地面输送机运行中实现更大的安全公差。
13、尽管当前难度的分类首先允许任意多的等级,但其可以包括至少一个简单难度和高难度,即,除了没有难度等级的状态(不违反保护区)之外两个不同的类别,这些类别对应于不可容忍的保护区违反和可容忍的保护区违反,因此在其中例如与之相应地低于或超过避开角限值。在此,于是还可以在进入低难度的情况下可选地仅输出警告,而在进入高难度的情况下可以触发地面输送机中的自动措施,该自动措施作用于地面输送机的运行,例如已经多次提到的地面输送机的自动制动。替代地,在低难度的情况下不采取措施,并且在高难度的情况下输出警告。例如,可以根据驾驶员的经验水平或根据当前行进的速度来决定在哪个难度中采取哪种措施。因此,在速度相对低和难度高的情况下,可以仅输出警告,而在速度相对高且难度高的情况下可以进行自动制动。
14、此外,在该上下文中,也可以确定地面输送机的最大转向角,不可超过该最大转向角以避免碰撞,使得相应地在一定情况下可以确定:在当前情况下排除沿相应方向避让。
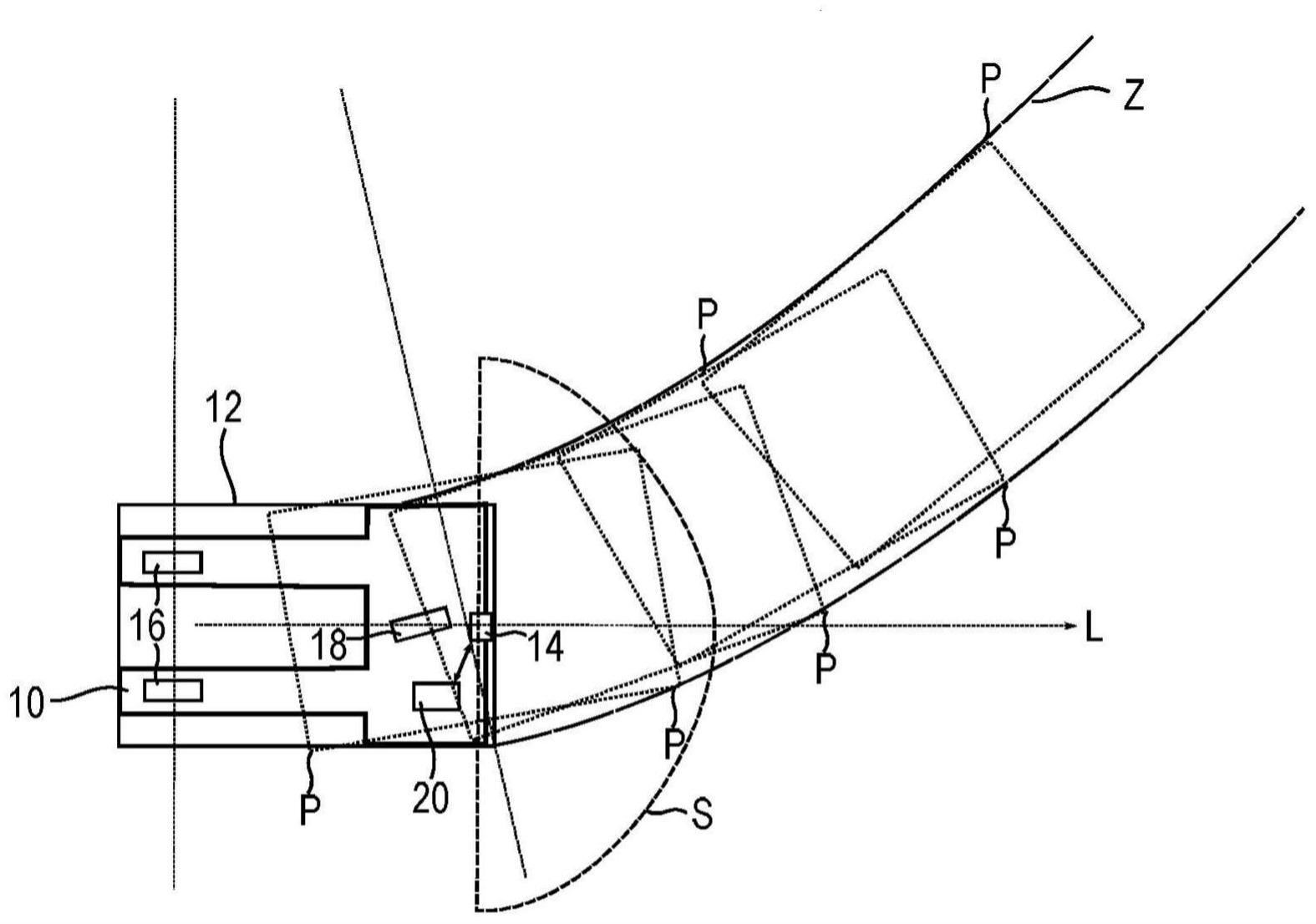
15、关于检测所求出的保护区中的障碍物,根据本发明以如下方式到达地面输送机的当前速度:即,经由对预设的时间段的评估来显示:地面输送机在该预设的时间段中预计移动了何种路线,这又反映在所计算出的保护区中。此外,可以基于:地面输送机在俯视图中具有已知的车辆平面图并且可以根据车辆平面图计算保护区,使得将预测的车辆轮廓用作为保护区,其中预测的车辆轮廓对应于在预设的时间段中待由地面输送机扫过的表面。
16、因此,借助根据本发明的方法,可以准确地描绘由车辆在预设时间段内预计扫过的表面,并且根据可用的传感器数据的分辨率可以获得唯一的、匹配于地面输送机的当前运行情况的保护区,该保护区又可以作为上述方法的基础。相应地,关于此点已经避免了错误检测,并且可以将对地面输送机的行进路线中的障碍物的预测应用于各种车辆类型,只要在执行该方法时相应车辆类型的相应的已知车辆平面图可用即可。显然地,在该上下文中同样可行的是:限定车辆平面图,使得其选择得比相应的地面输送机的自身外部尺寸更大,例如以便可以考虑待接收的负载或待维持的间距公差。
17、在此,对预测的车辆轮廓的计算可以在极坐标中执行,其中尤其极坐标系的极点可以对应于地面输送机关于其纵向轴线以及宽度轴线的中点,和/或极坐标系的极轴对应于地面输送机的主行进方向。
18、通过极坐标的这种使用可以将障碍物检测的计算耗费保持得非常低,这是因为既不必求解三角函数也不必计算根。更确切地说,通过内插通过轮廓点预设的预测车辆轮廓可将障碍物的检测仅作为对检测到的间距与预测间距的比较来执行,进而可归结为大于或等于运算,其中内插对应于所使用的至少一个传感器单元的分辨率。换言之,在以相对于极坐标系的极轴特定的角度中检测物体时可以执行物体和地面输送机之间所求出的间距和预测间距之间的比较,其中在低于的情况下预期发生碰撞。
19、此外,预测的车辆轮廓的计算可以借助于计算多个支撑点来执行,支撑点对应于对未来的在彼此相随的时间点的车辆位置的计算。在此,支撑点的数量可以根据当前车辆速度来选择,以便以上述方式获得优化设计的保护区,并且支撑点计算的粒度也可以以如下方式来执行:该方式提供计算耗费和保护区分辨率之间的最佳折衷。特别地,对包含支撑点的轨迹的内插或平滑同样也可以作为保护区的边界线来执行。
20、如上所述,本发明还涉及一种地面输送机,所述地面输送机设计用于:在其运行期间执行上述类型的方法,地面输送机包括:车辆本体;至少一个传感器单元,传感器单元设置在地面输送机的主行进方向上并且设计用于:可以在预设的角度范围内检测障碍物;速度传感器和转向角传感器;和控制单元,控制单元设计用于:从速度传感器和转向角传感器获得数据,以上面描述的方式计算保护区,计算至两侧的转向角差,其中分别避免与在预测的车辆轮廓内检测到的障碍物发生碰撞;以及根据计算的转向角差对避免障碍物的当前难度进行分类,和/或根据计算的转向角差触发预设的措施。
21、在求出保护区时,可以如所述的那样根据已知的车辆平面图来计算车辆轮廓。在此,用于计算预测的车辆轮廓的车辆平面图可以重新选择得大于实际的车辆本体,以便可以考虑待接收的负载和间距公差。
22、此外,关于此点应当确定:至少一个传感器单元检测地面输送机周围环境的预设的角度范围应有利地至少应与地面输送机的可能的转向角一样大,并且在理想情况下应当围绕主行进方向为180°。
23、尽管在根据本发明的地面输送机中可以考虑不同类型的传感器单元,但该传感器单元尤其可以包括lidar单元,其中这种传感器类型的特征在于在合理的价格下的高精度和可靠性。
24、最后,应该指出的是:本发明的地面输送机可以是手动引导的地面输送机,进而根据本发明的方法用于支持地面输送机的人类驾驶员,尽管原则上也不应排除在自动引导的车辆中作为安全系统来使用。
- 还没有人留言评论。精彩留言会获得点赞!