用于实施行驶任务的方法和分散式控制单元系统与流程
本发明涉及一种用于在分散式控制单元系统中实施行驶任务的方法。此外,本发明还涉及一种分散式控制单元系统,在该控制单元系统中实施所述方法。
背景技术:
技术实现思路
1、本发明的任务是,改进用于在分散式控制单元系统中实施行驶任务的方法。此外,本发明的任务是说明一种改进的分散式控制单元系统,在该控制单元系统中实施所述方法。
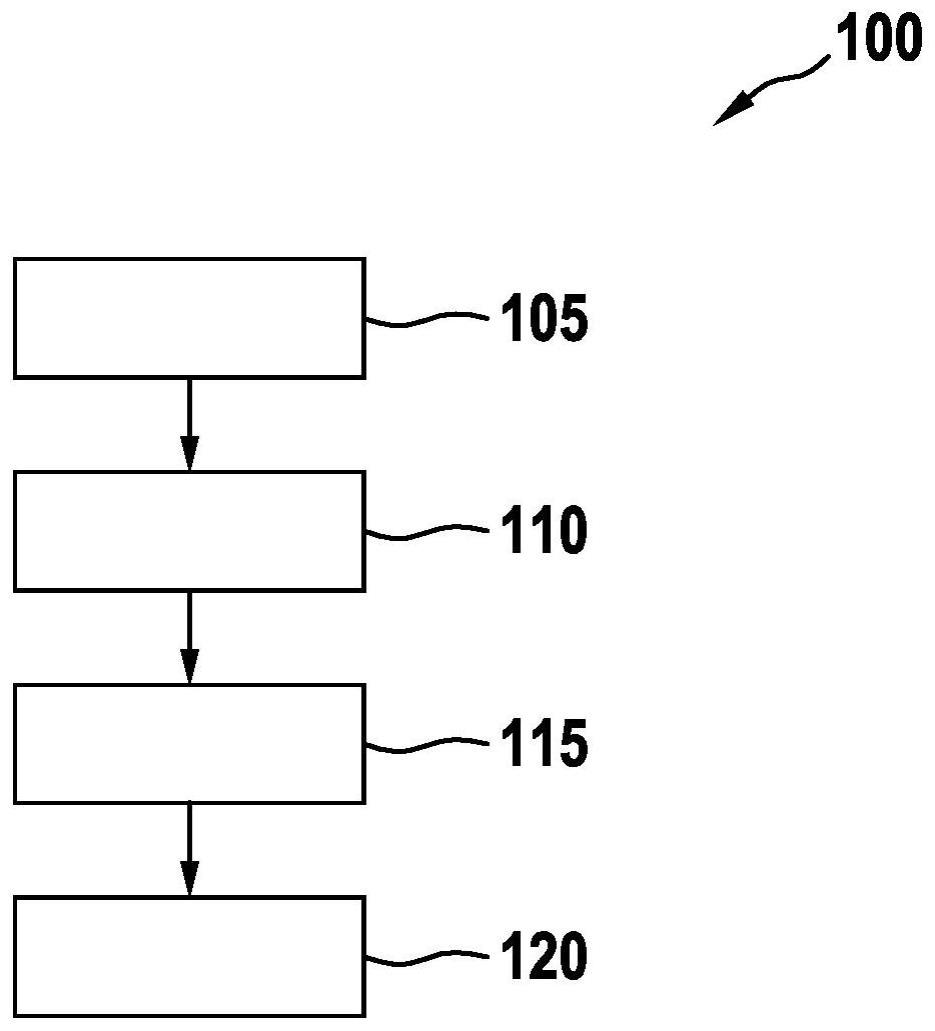
2、提出一种用于在分散式控制单元系统中实施行驶任务的方法以及一种分散式控制单元系统。为了执行行驶任务,分散式控制单元系统具有构造为发送器的至少两个控制单元和构造为接收器的至少一个控制单元。此外,构造为发送器的控制单元同样可以彼此间形成发送器和接收器形式的连接。所述至少两个发送器和所述至少一个接收器分别以通信方式彼此连接。所述至少两个发送器和所述至少一个接收器分别具有活动状态和运行状态。所提出的方法包括以下步骤:
3、在第一步骤中,分别通过所述至少两个发送器和所述至少一个接收器检验自身活动状态;
4、在第二步骤中,通过所述至少一个接收器将所述至少两个发送器的自身活动状态分别与所述至少一个接收器的自身活动状态进行比较;
5、如果所述至少两个发送器的自身活动状态和所述至少一个接收器的自身活动状态分别是无错误的,则在第三步骤中通过至少一个接收器执行对运行状态的评估,以及
6、如果所述至少两个发送器中的一个和所述至少一个接收器分别具有动态运行状态,则在第四步骤中通过所述至少一个接收器实施行驶任务。
7、驾驶员辅助系统的领域中的增加的复杂性导致车辆中参与的控制单元的数量提高。控制单元在此大多用作车辆中用于行驶任务的实施单元,所述实施单元在此与此相关地执行计算任务或计算、评估、信息的调整/补偿/平衡(abgleiche)、可信度检验等,即分别是信息源或通信源并且可以用作发送器和/或接收器。随着汽车中控制单元的数量增加,控制单元之间通信接口的数量也增加,同样需要正确地确定信息源的品质和/或状态(有效状态)。作为状态例如可以考虑活动状态和运行状态。在此,活动状态可反映各个控制单元的当前的自身状态估计,并且运行状态可相应于在正在进行的车辆运行中基于获得的其他控制单元的活动状态和/或获得的传感器信息及其解释关于自身状态的改变的动态评估。
8、原则上可以区分,计算任务、计算、处理步骤等是分布地(分散式地)还是集中地由控制单元系统实施。这两种方案的共同点是,在计算链中的确定的点必须将来自不同源的信息(例如关于各个控制单元的上述状态)汇总。在此,参与的信息源的数量越多,所需的调整计算的数量也越多。在控制单元上要求不同信息源的汇总,所述控制单元构造为接收器并且使用这些分别构造为发送器的控制单元的信息,但是本身不是这些信息的来源,或者是结果的融合、信息的调整,或者是进入的信息与内部信息的可信度测试。
9、所提出的方法在此有利地适用于分散式控制单元系统,其中,构造为接收器的控制单元需要来自构造为发送器的控制单元的如下信息:发送器本身已检验(也就是发送器的自身活动状态是无错误的),然后接收器可以信任发送器的数据。控制单元例如可以包括控制器和/或传感器单元。在分散式控制单元系统中,必须识别并且传输各个控制单元的有错误的活动状态(和/或偏差,通常是显著的偏差),以便提高系统的可信度和可靠性并且对于涉及车辆中的人员的安全性的行驶任务没有危险。这以有利的方式确保所提出的方法连同所提出的分散式控制单元系统。
10、在此,上述第一步骤可以意味着,接收器检验自身活动状态,并且至少两个发送器同样分别检验自身活动状态。对于第二步骤,至少两个发送器可分别通过通信连接将经检验的自身活动状态传输给接收器,并且该接收器可随后执行对活动状态的比较。如果至少两个发送器的自身活动状态分别是无错误的,也就是发送器的所有数据可以信任,并且接收器的自身活动状态是无错误的,则接收器评估至少两个发送器和接收器的各个运行状态。因为运行状态可以是不同的并且例如可以表示初始化(静态运行状态)以及已经完全的运行准备就绪(动态运行状态),所以接收器在第三步骤中的评估对于正确地解释结果和状态估计的形式的正确反应和基于这些结果实施反应是必要的。只有在存在动态运行状态的情况下,接收器才在第四步骤中实施行驶任务。因此,在运行中对这种总体动态准备状态存在的明确和正确识别是非常重要的。行驶任务例如可以是距离调节功能/距离调节速度控制器acc(acc:adaptive cruise control,自适应巡航控制)或者构造为替代的驾驶员辅助系统,例如构造为自动车道保持辅助lkas(lkas:lane keeping assistant,车道保持辅助系统)等等。此外,第四步骤可以包括,求取发送器对于总计算结果的动态值贡献(dynamischer wertbeitrag)。对于每个发送器例如可以限定用于行驶任务的贡献参量。该贡献可以中央地由控制单元来检查,该控制单元构造为接收器或者ecu,例如可以融合数据或者也可以调整数据。因为实施行驶任务例如可以包括对各个发送器或接收器的数据的融合和/或调整和/或可信度检验。
11、在另一实施方式中,所述至少两个发送器和/或所述至少一个接收器设计为用于分别在第一步骤中检验自身活动状态时检验在所述至少两个发送器上和/或在所述至少一个接收器上是否存在电压降和/或偏差。如果在所述至少两个发送器上和/或在所述至少一个接收器上存在电压降和/或偏差,则所述至少两个发送器和/或所述至少一个接收器的自身活动状态分别是有错误的。如果在至少两个发送器上和/或在所述至少一个接收器上不存在电压降和/或偏差,则所述至少两个发送器和/或所述至少一个接收器的自身活动状态分别是无错误的。
12、以这种方式,接收器可以信任所述至少两个发送器的数据,因为所述至少两个发送器向接收器传输如下信息:它们本身已经检验了活动状态,并且相应地也无错误地向接收器传输了该活动状态。计算控制单元的有错误的自身状态(或者例如过大的偏差)同样可能导致计算结果不能被信任,所述计算控制单元接收不同的其他控制器的信息、即例如构造为接收器。例如,自身活动状态可以是无错误的,或者替代于此构造为是正确的、健康的或“在规范内(in spec)”(即处于规范内)或者是可信任的等等。因此,有利地改善了系统的可靠性,并且可以优化在分散地在车辆的控制单元上实施的、全面的行驶任务(例如上述距离调节功能)的情况下的安全性。尤其是可以通过所提出的方式立即识别出控制单元或传感器单元的数据是否有错误,并且采取快速的应对措施、例如发出错误报告,或者不信任有错误的控制单元或传感器单元,或者通过相应的标记降低信任水平。
13、在另一实施方式中,如果所述至少两个发送器和/或所述至少一个接收器将自身活动状态识别为有错误的,则所述至少一个接收器在第二步骤中分别对于所涉及的发送器和/或对于所涉及的接收器触发错误反应。错误反应以替代反应的形式和/或以错误报告的形式构造。替代反应包括:对于第三步骤,保持不考虑所涉及的发送器和/或所涉及的接收器,并且仅评估所述至少两个发送器中的一个和/或所述至少一个接收器的运行状态,其自身活动状态分别在第一步骤中识别为是无错误的。
14、有利地,与各个控制单元上的通常仅仅静态的硬件状态估计器相比,可以借助所提出的方法和系统来观察控制单元的状态在动态运行中彼此如何表现,并且此外可以提早采取合适的措施,如错误反应等。因为在运行期间,控制单元的活动状态或运行状态(例如由于低电压、行驶状态、外部的温度影响、线缆的不良接触、短路等等)与其他控制单元的活动或运行状态导致不同的组合,其必须被考虑用于在具有不同源的分布式/分散式控制单元系统中的状态估计。因此,考虑是重要的,由此求取计算结果的接收器上的计算结果也是有效的,因为活动状态、即自身状态是正确的(即是功能正常的或“健康的”)。在触发错误反应之前,例如可以首先执行该信号的去抖(entprellung)和可能的反应,即当前条件的分类:例如没有信号,或者信号或该信息比偏差和/或存在的电压降明显更晚地才被传输给接收器,等等。
15、如果作为发送器的摄像机具有有错误的活动状态(例如由于存在的色差)而作为发送器的另一传感器包括无错误的活动状态,则例如可以立即执行替代反应。然后,接收器可以在对所述单元的运行状态进行评估之前例如作为替代反应信任所述另一传感器(其所传输的活动状态是无错误的),而不是信任摄像机的数据。运行状态的评估于是可以基于接收器以及另一传感器的运行状态。
16、在另一实施方式中,所述至少两个发送器和/或所述至少一个接收器的运行状态分别相应于以下状态中的至少一个和/或组合:可操作(operational)、不可操作(non-operational)、初始化、延迟、预处理、关停、动态、静态。动态运行状态尤其相应于状态“动态”。可以设想其它的动态运行状态,例如“可操作”等。基于对各个运行状态的考虑,可以在正在进行的运行中正确地解释对数据或信息的进一步处理,并且因此改善安全性、可靠性和可信性。此外,所提出的方法可以简单地但一致地在接收器和发送器控制器上实现。
17、在另一实施方式中,在第一和第二步骤中周期性地重复对自身活动状态的检验和比较。对自身活动状态的检验和比较的周期性重复例如可以实现为持续或连续的监测。在此,例如可以区分以下情况:所有控制单元都不具有有错误的活动状态,或者一个或多个控制单元、例如发送器具有有错误的活动状态。如果在连续的监测中已经求得自身活动状态是无错误的,也就是说例如对于数据的进一步处理是“在规范内(in spec)”的,则在下一个步骤中求取各个控制单元(关于运行状态)彼此处于哪种状态组合中。该方法有利地允许计算的正确解释,能够快速、简单并且成本有利地实施并且因此提高车辆中的安全性。此外,基于连续的监测或者各个步骤的上述周期性的重复可以提供持久的信任基础。
18、在另一实施方式中,第一和第二步骤中对自身活动状态的检验和比较可以借助于矩阵来实现。该构型进一步简化了所提出的方法的实施,为控制单元的各个状态组合提供了可能的场景的更好的清晰性并且提供了更快的反应可能性的优点。
19、此外,根据本发明提出一种计算机程序产品以及一种机器可读的存储介质。计算机程序产品包括指令,当计算机程序由计算机实施时,这些指令促使计算机实施所提出的方法。在机器可读的存储介质上存储了所提出的计算机程序产品。有利地,以这种方式能够借助于常规方法实现所提出的方法的不复杂的保险以及实施。因此不产生附加的耗费。
20、本发明的前述的有利构造和改进方案(除了例如在明确的依赖性或不可兼用的替代方案的情况下)可以单独地或也可以相互任意组合地使用。
- 还没有人留言评论。精彩留言会获得点赞!