一种电动支腿调平装置的制作方法
1.本发明涉及电动支腿技术领域,具体涉及一种电动支腿调平装置。
背景技术:
2.电动调平支腿可以支撑一个机械系统平台,调整平台的姿态至水平,因此被广泛应用于专用车辆、平台、升降机、轮式起重机等。当工作时,调平支腿调节伸出的长度,从而克服地面不平整因素,使机械系统平台具有水平的姿态,同时保持刚性。调平支腿的支撑过程分为2个步骤:1、支腿完全触及地面,2、同步调整各支腿长度使其水平。传统的电动调平支腿在步骤1时,需要测量各支腿驱动电机的输出力矩,当力矩达到某一量级后,认为支腿已经完全触地。这种方法的弊端在于,电机力矩不容易测量,需要配置力矩传感器或使用伺服电机,成本高。
技术实现要素:
3.为了解决上述技术缺陷之一,本发明提供了一种电动支腿调平装置。
4.根据本发明提供的一种电动支腿调平装置,包括支腿杆,支腿杆外侧套设有安装板,安装板上设有测距单元,支腿杆内同轴设有支腿螺杆,支腿螺杆的一端与驱动单元固定连接,另一端的外侧同轴设有支腿伸缩杆,支腿伸缩杆的端部设有脚杯。
5.在本发明中,测距单元竖直设置于安装板上,且与支腿杆轴向平行。
6.在本发明中,测距单元为超声波测距传感器、激光测距传感器和红外线测距传感器的一种。
7.在本发明中,支腿杆的顶部设有固定板,驱动单元设置于固定板上,驱动单元通过减速组件与支腿螺杆的一端固定连接。
8.在本发明中,驱动单元为伺服电机,伺服电机用于驱动支腿螺杆带动支腿伸缩杆在支腿杆内伸缩。
9.在本发明中,减速组件包括减速机和支撑板,减速机的数量为两个,两个减速机对称设置于所述支撑板上;两个减速机的一端均通过支撑板设有齿轮,两个齿轮之间啮合连接;其中一个减速机的另一端与支腿螺杆的一端连接,另外一个减速机的另一端与驱动单元连接。
10.在本发明中,在其中一个齿轮的顶部设有手摇连接件,手摇连接件用于在驱动单元断电或损坏时对支腿螺杆进行手动调整。
11.在本发明中,支腿伸缩杆的两端均套设有支腿耐磨环。
12.在本发明中,支腿杆的端部设有电子尺安装板,电子尺安装板设置于支撑腿和脚杯之间;电子尺安装板的顶部设有电子尺,电子尺位于支腿杆的一侧,且与支腿杆轴向平行。
13.在本发明中,测距单元和驱动单元均与外部控制箱电性连接。
14.采用本发明提供的一种电动支腿调平装置,具有以下优点:1、在判断支腿是否触地时,无需测量各支腿驱动电机的输出力矩,只需通过测距单元将支腿与地面的垂直距离进行实时检测即可判断是否触地。
15.2、在对支腿进行调平的过程中,通过设置减速组件确保支腿调平作业的可靠性。
16.3、通过设置手摇连接件,为支腿调平提供双重选择。
17.4、在支腿伸缩杆的两端设置支腿耐磨环,在长期的调平作业过程中可确保支腿伸缩杆伸缩的可靠性。
18.5、通过设置电子尺,可对支腿的位移数据精准测量。
附图说明
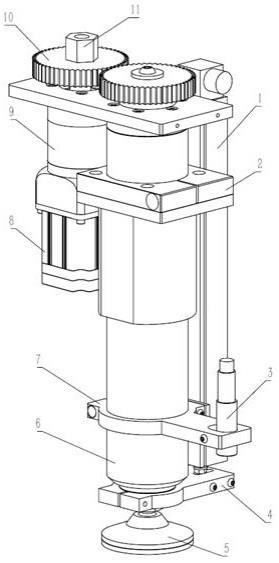
19.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1为本发明提供的一种电动支腿调平装置整体结构示意图;图2为本发明提供的一种电动支腿调平装置整体结构中支腿杆剖面示意图。
20.图中:电子尺1、支腿安装板2、超声波测距传感器3、电子尺安装板4、金属脚杯5、支腿杆6、测距传感器安装板7、伺服电机8、减速机9、齿轮10、手摇连接件11、支腿螺杆12、支腿伸缩杆13、支腿耐磨环14。
具体实施方式
21.为了使本发明实施例中的技术方案及优点更加清楚明白,以下结合附图对本发明的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本发明的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
22.如图1-图2所示,一种电动支腿调平装置,包括支腿杆6,支腿杆6外侧套设有安装板7,安装板7上设有测距单元,支腿杆6内同轴设有支腿螺杆12,支腿螺杆12的一端与驱动单元固定连接,另一端的外侧同轴设有支腿伸缩杆13,支腿伸缩杆13的端部设有脚杯5。
23.在具体实施过程中,测距单元竖直设置于安装板7上,且与支腿杆6轴向平行,支撑腿6内同轴设置支撑螺杆12,支撑螺杆12的一端延伸至支腿杆6顶端的外侧与驱动单元固定连接,另一端的外侧同轴设置支腿伸缩杆13,支腿伸缩杆13的底部设有脚杯5,脚杯5为万向型金属脚杯。一个支撑平台可以安装3个或3个以上数量的支腿杆6进行调平作业,当安装3个支腿杆6进行调平作业时,可对支撑平台的俯仰和横滚姿态进行调整,并且在调整姿态的过程中可以进行水平姿态调整,也可进行任意角度的姿态调整;在支腿调平过程中,将测距单元和驱动单元与外部plc控制箱电性连接,通过控制器控制驱动单元驱动支撑螺杆12带动支腿伸缩杆13在支腿杆6内进行直线伸缩运动,支撑螺杆12直线运动的过程中通过螺纹也可在支腿杆6内任意高度的位置实现自锁的效果,然后利用测距单元实时检测支腿杆6与地面之间的垂直距离,最终实现支腿杆6的调平作业。
24.在本发明实施例中,测距单元为超声波测距传感器、激光测距传感器和红外线测距传感器的一种。
25.在具体实施过程中,测距单元具体选用超声波测距传感器3作为支腿杆6调平的测距装置。
26.在本发明实施例中,支腿杆6的顶部设有固定板2,驱动单元设置于固定板2上,驱动单元通过减速组件与支腿螺杆12的一端固定连接。
27.在具体实施过程中,为了确保支腿杆6调平作业的可靠性,驱动单元与支腿螺杆12之间通过设置减速组件进行传动作业。
28.在本发明实施例中,驱动单元为伺服电机8,伺服电机8用于驱动支腿螺杆12带动支腿伸缩杆13在支腿杆6内伸缩。
29.在具体实施过程中,支腿伸缩杆13本身不具备伸缩功能,需通过伺服电机8驱动支腿螺杆12带动支腿伸缩杆13从而实现伸缩功能。
30.在本发明实施例中,减速组件包括减速机9和支撑板,减速机9的数量为两个,两个减速机9对称设置于支撑板上;两个减速机9的一端均通过支撑板设有齿轮10,两个齿轮10之间啮合连接;其中一个减速机9的另一端与支腿螺杆12的一端连接,另外一个减速机9的另一端与驱动单元连接。
31.在具体实施过程中,减速组件包括减速机9、齿轮10和支撑板,减速机9具体为减速电机,减速机9的数量为两个,且对称设置于支撑板上,两个减速机9的一端均设有齿轮10,两个齿轮10之间啮合连接,其中一个减速机9的另一端通过螺栓固定于固定板2上,且与支腿螺杆12的一端固定连接,并带动支腿螺杆12传动作业;另外一个减速机9的另一端与伺服电机8的驱动端通过联轴器传动连接,将伺服电机8传动的速度进行减速。
32.在本发明实施例中,在其中一个齿轮10的顶部设有手摇连接件11,所述手摇连接件11用于在驱动单元断电或损坏时对支腿螺杆12进行手动调整。
33.在具体实施过程中,当伺服电机8突然出现断电或因长期使用损坏时,可通过其中一个齿轮10上的手摇连接件11手动转动支腿螺杆12带动支腿伸缩杆13进行直线伸缩运动,以此确保支腿调平作业的正常。
34.在本发明实施例中,支腿伸缩杆13的两端均套设有支腿耐磨环14。
35.在具体实施过程中,支腿伸缩杆13两端的支腿耐磨环14可有效避免支腿伸缩杆13磨损严重。
36.在本发明实施例中,支腿杆6的端部设有电子尺安装板4,电子尺安装板4设置于支撑腿6和脚杯5之间;电子尺安装板4的顶部设有电子尺1,电子尺1位于支腿杆6的一侧,且与支腿杆6轴向平行。
37.在具体实施过程中,通过在支腿杆6上设置电子尺安装板4,在支腿杆6位移的过程中带动电子尺1一端随着万向型金属脚杯5移动的同时,电子尺1可精准获得支腿杆6的位移数据。
38.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
39.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精
神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1