一种用于对车辆运动状态进行系统性监测的方法和系统与流程
本发明涉及信息采集领域,尤其涉及一种用于对车辆运动状态进行系统性监测的方法和系统。
背景技术:
1、人类社会已经迈入人工智能的时代,自动驾驶技术作为人工智能热门研究领域之一,其价值和意义已经逐步显现,自动驾驶汽车能够解放人类的双手,降低交通事故发生的频率,提高通行效率,保证人们的安全,自动驾驶技术的研究与应用已成为车辆行业升级的利器。自动驾驶控制系统是自动驾驶技术的重要组成部分,是影响自动驾驶技术性能优劣的重要因素。
2、车辆系统状态是自动驾驶控制系统的输入,但受限于系统某些状态量不易直接量测、传感器测量误差等问题。具体地,车辆在运动过程中,系统某些状态量无法直接测量,如车辆在弯道行驶时,无法通过传感器获取车辆的质心侧偏角信息。同时,车辆运行的路面坡度角和倾斜角也会对车辆的运动状态产生影响,但是车载传感器无法直接测量路面坡度角和倾斜角。车辆运动状态信号的缺失会导致自动驾驶控制系统精度降低或者失效。此外,量测设备受限于经济性和使用性限制,很难工程化应用;量测设备受限于自身性能,测量信息存在误差。例如高精度的gps系统造价高昂,为降低车辆成本,很难应用于量产自动驾驶车辆。量产自动驾驶车辆车载传感器大部分成本较低,测量精度有限,输入到控制系统的信号精度有限,从而导致无法实现高精度控制。
3、针对上述问题,现有技术中的解决方案通常只针对单个车辆信号设计了监测方法,未对车辆状态进行系统的监测方法设计。因此,需要能够改进现有技术中的缺陷的方法和系统。
技术实现思路
1、提供本
技术实现要素:
来以简化形式介绍将在以下具体实施方式部分中进一步描述的一些概念。本发明内容并不旨在标识出所要求保护的主题的关键特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。
2、针对现有技术中的问题,本发明提出了一种针对车辆运动状态的系统性监测方法,能够对于车辆的滑移状态、横向速度、纵向速度、航向角、横摆角、侧倾角,惯导系统的横向加速度测量偏差、纵向加速度测量偏差、角速度测量偏差,运行路面的坡度进行了系统的监测,丰富了车辆运动系统的状态量信号,获取无法利用传感器测量的系统状态量信号,以使得能够在仅使用惯导系统和轮速计传感器的情况下,满足大部分自动驾驶控制算法的系统状态量信号需求,并且提高了车辆状态量信号精度。
3、在本发明的一个实施例中,公开了一种用于对车辆运动状态进行系统性监测的方法,该方法包括:
4、获取包括传感器测量值的输入信号;
5、基于该输入信号中所包括的轮胎转速、轮胎表面速度和轮胎转角加速度来检测轮胎打滑状态;
6、根据该输入信号中所包括的轮胎转速、发动机扭矩、制动信号和档位信号来判断车辆横向运行状态和车辆纵向运行状态,其中车辆横向运行状态被划分为侧偏和不侧偏,车辆纵向运行状态被划分为静止、运行不制动和运行制动;
7、基于该轮胎打滑状态和该车辆纵向运行状态来监测车辆纵向运行速度;
8、通过将该输入信号中所包括的偏航角角速度、车轮转角和车辆纵向加速度与标定阈值进行比较来执行惯性测量单元偏置监测系统使能;
9、对由该惯性测量单元偏置监测系统监测到的纵向加速度、横向加速度和偏航角角速度的测量偏差进行处理以获取这三个测量偏差的测量偏置监测值并基于该测量偏置监测值来获取这三个测量值的无偏测量值;
10、根据该无偏测量值来监测车辆横向运行速度;
11、根据该无偏测量值以及该车辆横向运行速度和该车辆纵向运行速度来监测车辆运行路面坡度角;以及
12、输出所监测到的各项监测值。
13、在本发明的一个实施例中,该轮胎打滑状态根据以下方式之一来确定:单个车轮转速的纵向比较;多个车轮转速间的横向比较;以及轮速微分与imu-ax的直接比较。
14、在本发明的一个实施例中,基于该轮胎打滑状态和该车辆纵向运行状态来监测车辆纵向运行速度进一步包括:
15、根据该轮胎打滑状态和该车辆纵向运行状态来选取最佳状态轮胎以获取该最佳状态轮胎的轮胎表面速度;
16、基于该轮胎表面速度通过几何关系及坐标变换计算出车辆纵向运行速度预测值;以及
17、利用该车辆纵向运行速度预测值与通过传感器信息计算出的车辆纵向运行速度信息,通过卡尔曼滤波来获取车辆纵向运行速度监测值。
18、在本发明的一个实施例中,通过将该输入信号中所包括的偏航角角速度、车轮转角和车辆纵向加速度与标定阈值进行比较来执行惯性测量单元偏置监测系统使能进一步包括:
19、当车辆保持匀速直线行驶时,分别判断所获取的偏航角角速度信号、车轮转角信号以及车辆纵向加速度信号是否在0位上;以及
20、在与0位差距大于阈值的情况下开启该惯性测量单元偏置监测系统。
21、在本发明的一个实施例中,对由该惯性测量单元偏置监测系统监测到的纵向加速度、横向加速度和偏航角角速度的测量偏差进行处理以获取这三个测量偏差的测量偏置监测值进一步包括:
22、通过低通滤波和幅值滤波分别对这三个测量偏差进行处理并将滤波后的状态值作为该测量偏置监测值。
23、在本发明的一个实施例中,该方法进一步包括基于该无偏测量值来监测车辆偏航角,包括以下操作:
24、建立包含垂向、侧倾和俯仰三个运动自由度的车辆联合模型;以及
25、将该无偏测量值代入该车辆联合模型以获取车辆偏航角监测值。
26、在本发明的一个实施例中,该方法进一步包括根据该无偏测量值来监测车辆质心侧偏角,其中该车辆质心侧偏角和该车辆横向运行速度进一步通过以下操作来监测:
27、利用车辆运动学模型和luenberger观测器来获取车辆质心侧偏角和车辆横向运行速度监测值。
28、在本发明的一个实施例中,根据该无偏测量值以及该车辆横向运行速度和该车辆纵向运行速度来监测车辆运行路面坡度角进一步包括:
29、通过卡尔曼滤波来获取车辆运行路面坡度角监测值。
30、在本发明的一个实施例中,该车辆纵向运行速度以及该车辆质心侧偏角和该车辆横向运行速度进一步基于该车辆运行路面坡度角来监测。
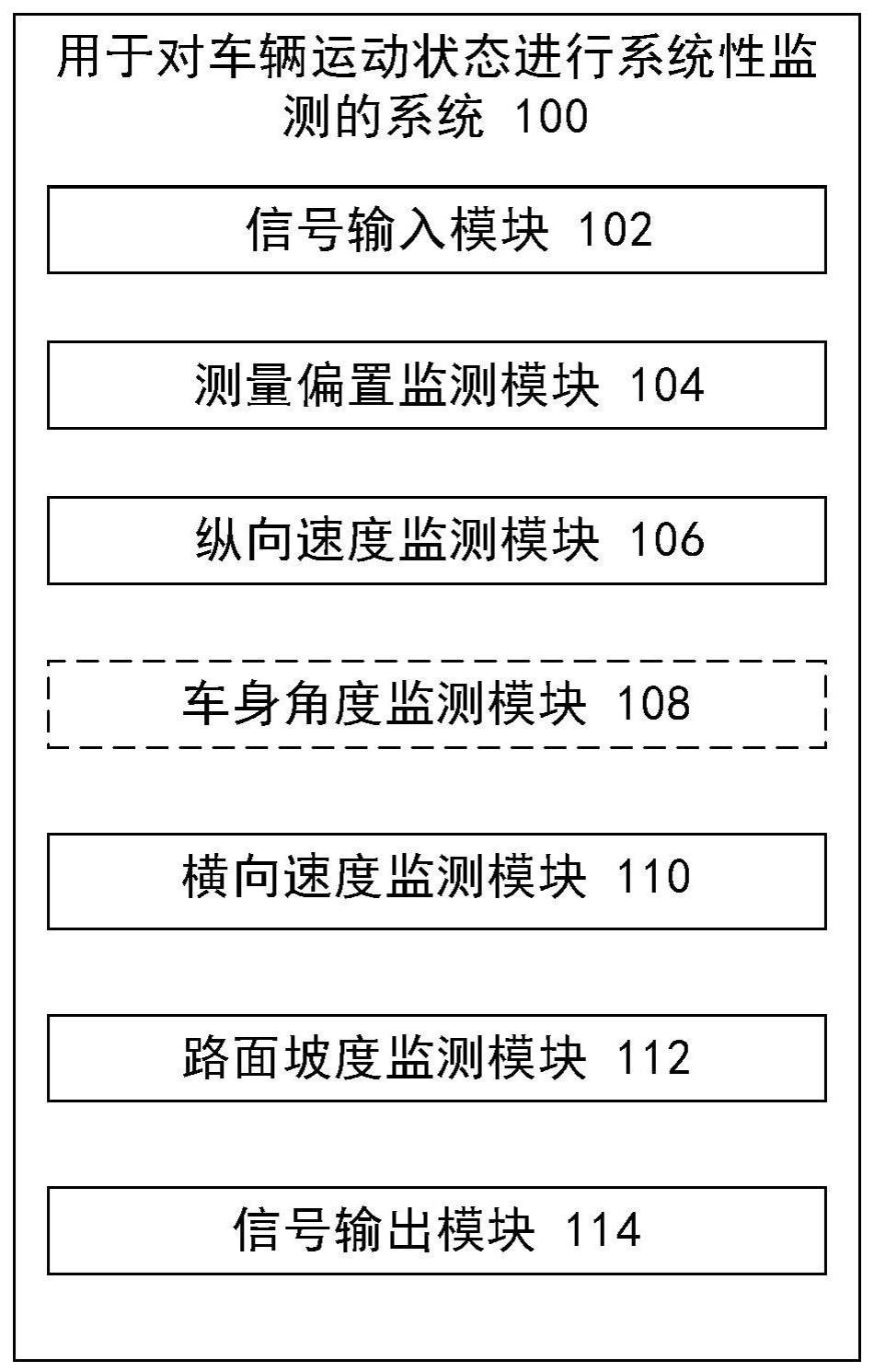
31、在本发明的另一个实施例中,公开了一种用于对车辆运动状态进行系统性监测的系统,该系统包括:
32、信号输入模块,其被配置成获取包括传感器测量值的输入信号;
33、测量偏置监测模块,其被配置成:
34、通过将该输入信号中所包括的偏航角角速度、车轮转角和车辆纵向加速度与标定阈值进行比较来执行惯性测量单元偏置监测系统使能;以及
35、对由该惯性测量单元偏置监测系统监测到的纵向加速度、横向加速度和偏航角角速度的测量偏差进行处理以获取这三个测量偏差的测量偏置监测值并基于该测量偏置监测值来获取这三个测量值的无偏测量值;
36、纵向速度监测模块,其被配置成:
37、基于该输入信号中所包括的轮胎转速、轮胎表面速度和轮胎转角加速度来检测轮胎打滑状态;
38、根据该输入信号中所包括的轮胎转速、发动机扭矩、制动信号和档位信号来判断车辆横向运行状态和车辆纵向运行状态,其中车辆横向运行状态被划分为侧偏和不侧偏,车辆纵向运行状态被划分为静止、运行不制动和运行制动;以及
39、基于该轮胎打滑状态和该车辆纵向运行状态来监测车辆纵向运行速度;
40、横向速度监测模块,其被配置成根据该无偏测量值来监测车辆横向运行速度;
41、路面坡度监测模块,其被配置成根据该无偏测量值以及该车辆横向运行速度和该车辆纵向运行速度来监测车辆运行路面坡度角;以及
42、信号输出模块,其被配置成输出所监测到的各项监测值。
43、在本发明的一个实施例中,该纵向速度监测模块被进一步配置成根据以下方式之一来确定该轮胎打滑状态:单个车轮转速的纵向比较;多个车轮转速间的横向比较;以及轮速微分与imu-ax的直接比较。
44、在本发明的一个实施例中,该纵向速度监测模块被进一步配置成通过以下操作来监测该车辆纵向运行速度:
45、根据该轮胎打滑状态和该车辆纵向运行状态来选取最佳状态轮胎以获取该最佳状态轮胎的轮胎表面速度;
46、基于该轮胎表面速度通过几何关系及坐标变换计算出车辆纵向运行速度预测值;以及
47、利用该车辆纵向运行速度预测值与通过传感器信息计算出的车辆纵向运行速度信息,通过卡尔曼滤波来获取车辆纵向运行速度监测值。
48、在本发明的一个实施例中,该测量偏置监测模块被进一步配置成通过以下操作来执行惯性测量单元偏置监测系统使能:
49、当车辆保持匀速直线行驶时,分别判断所获取的偏航角角速度信号、车轮转角信号以及车辆纵向加速度信号是否在0位上;以及
50、在与0位差距大于阈值的情况下开启该惯性测量单元偏置监测系统。
51、在本发明的一个实施例中,该测量偏置监测模块被进一步配置成通过以下操作来获取该测量偏置监测值:
52、通过低通滤波和幅值滤波分别对这三个测量偏差进行处理并将滤波后的状态值作为该测量偏置监测值。
53、在本发明的一个实施例中,该装置进一步包括车身角度监测模块,其被配置成基于这三个测量值的无偏测量值来监测车辆偏航角,并且该车身角度监测模块被进一步配置成通过以下操作来监测该车辆偏航角:
54、建立包含垂向、侧倾和俯仰三个运动自由度的车辆联合模型;以及
55、将该无偏测量值代入该车辆联合模型以获取车辆偏航角监测值。
56、在本发明的一个实施例中,该横向速度监测模块被进一步配置成根据这些无偏测量值来监测车辆质心侧偏角,并且通过以下操作来监测该车辆质心侧偏角和该车辆横向运行速度:
57、利用车辆运动学模型和luenberger观测器来获取车辆质心侧偏角和车辆横向运行速度监测值。
58、在本发明的一个实施例中,该路面坡度监测模块被进一步配置成通过以下操作来监测该车辆运行路面坡度角:
59、通过卡尔曼滤波来获取车辆运行路面坡度角监测值。
60、在本发明的又一个实施例中,公开了一种计算机可读存储介质,其存储用于对车辆运动状态进行系统性监测的指令,包括:
61、用于获取包括传感器测量值的输入信号的指令;
62、用于基于该输入信号中所包括的轮胎转速、轮胎表面速度和轮胎转角加速度来检测轮胎打滑状态的指令;
63、用于根据该输入信号中所包括的轮胎转速、发动机扭矩、制动信号和档位信号来判断车辆横向运行状态和车辆纵向运行状态的指令,其中车辆横向运行状态被划分为侧偏和不侧偏,车辆纵向运行状态被划分为静止、运行不制动和运行制动;
64、用于基于该轮胎打滑状态和该车辆纵向运行状态来监测车辆纵向运行速度的指令;
65、用于通过将该输入信号中所包括的偏航角角速度、车轮转角和车辆纵向加速度与标定阈值进行比较来执行惯性测量单元偏置监测系统使能的指令;
66、用于对由该惯性测量单元偏置监测系统监测到的纵向加速度、横向加速度和偏航角角速度的测量偏差进行处理以获取这三个测量偏差的测量偏置监测值并基于该测量偏置监测值来获取这三个测量值的无偏测量值的指令;
67、用于根据该无偏测量值来监测车辆横向运行速度的指令;
68、用于根据该无偏测量值以及该车辆横向运行速度和该车辆纵向运行速度来监测车辆运行路面坡度角的指令;以及
69、用于输出所监测到的各项监测值的指令。
70、在结合附图研读了下文对本发明的具体示例性实施例的描述之后,本发明的其他方面、特征和实施例对于本领域普通技术人员将是明显的。尽管本发明的特征在以下可能是针对某些实施例和附图来讨论的,但本发明的全部实施例可包括本文所讨论的有利特征中的一个或多个。换言之,尽管可能讨论了一个或多个实施例具有某些有利特征,但也可以根据本文讨论的本发明的各种实施例使用此类特征中的一个或多个特征。以类似方式,尽管示例性实施例在下文可能是作为设备、系统或方法实施例进行讨论的,但是应当领会,此类示例性实施例可以在各种设备、系统、和方法中实现。
- 还没有人留言评论。精彩留言会获得点赞!