无人车防撞装置和无人车的制作方法
1.本实用新型属于车辆防护装置技术领域,具体涉及一种无人车防撞装置和一种无人车。
背景技术:
2.随着无人车技术的发展,一些港口物流场站采用了agv(automated guided vehicle,自动引导车辆)等无人车作为货物运输载体。然而,物流场站的环境较为复杂,无人车在行驶中难免发生碰撞事故,容易造成无人车以及所载货物的损坏。为此,现有的agv通常在车体上加装防撞横梁,当防撞横梁与其他物体碰撞并产生位移时,agv能够通过传感设备感应到对应的信号,并进行紧急制动。然而,现有agv通过防撞横梁在车体纵向的位移带动导向杆触发信号,而防撞横梁的设置方式存在仍然缺陷,受到斜向的碰撞力时容易造成导向杆卡滞,影响导向传感设备正常触发信号,进而导致车体制动不及时,不利于降低碰撞损失。
技术实现要素:
3.有鉴于此,为解决现有技术中防撞横梁遇到斜向碰撞力时导向杆容易卡滞、感应信号不能正常触发、车辆制动不及时等问题,本实用新型提供了一种无人车防撞装置和一种无人车。
4.本实用新型提供一种无人车防撞装置,包括:安装支架,用于连接无人车的车体;防撞横梁,设于安装支架远离车体的一侧;多个导杆机构,沿车体的横向间隔设置,每个导杆机构的一端与防撞横梁转动连接,每个导杆机构的另一端穿过防撞横梁向远离防撞横梁的方向延伸;其中,至少一个导杆机构与防撞横梁的连接点能够在防撞横梁上移动;感应组件,包括感应件和配合件,配合件与感应件之间的相对移动能够使感应件触发感应信号,配合件设于导杆机构远离防撞横梁的一端,感应件与配合件对应设置。
5.在一种可行的实现方式中,防撞横梁上设有多个连接孔,每个导杆机构靠近防撞横梁的一端与一个连接孔对应设置,且导杆机构通过连接件与连接孔形成转动连接;其中,至少一个连接孔为腰形孔,且腰形孔的长边沿车体的横向延伸。
6.在一种可行的实现方式中,导杆机构的数量为两个,每个导杆机构远离防撞横梁的一端对应设有一个感应组件。
7.在一种可行的实现方式中,导杆机构包括:导向套,沿车体的纵向穿设于安装支架中;导向杆,一端与防撞横梁转动连接,另一端穿过导向套并向远离防撞横梁的方向伸出;其中,每个感应组件中,配合件与导向杆远离防撞横梁的一端连接,感应件与安装支架相连接。
8.在一种可行的实现方式中,导杆机构还包括:弹簧,套设于导向杆上,弹簧的一端与导向杆连接,弹簧的另一端与导向套远离防撞横梁的一端连接。
9.在一种可行的实现方式中,导向套远离防撞横梁的一端设有可拆卸的端盖,端盖
开设有第一导向孔,导向杆远离防撞横梁的一端由第一导向孔伸出;导杆的侧壁上设有凸台,弹簧的一端与凸台抵接,弹簧的另一端与端盖抵接。
10.在一种可行的实现方式中,配合件包括遮光板,遮光板设于导杆机构的一侧,遮光板远离防撞横梁的一端向靠近导杆机构的方向弯折并套设于导向杆远离防撞横梁的一端;安装支架背向防撞横梁的一侧对应设有第一连接板,且第一连接板向远离防撞横梁的方向延伸;感应件包括接近开关,接近开关设于第一连接板上,且接近开关的感应端朝向遮光板;其中,遮光板上与接近开关的感应端相对应的位置设有透光孔。
11.在一种可行的实现方式中,防撞横梁朝向安装支架的一侧设有第二连接板,连接孔设于第二连接板上;导向杆靠近防撞横梁的一端开设有安装槽,且安装槽相对的两个侧壁上均设有安装孔;其中,第二连接板伸入安装槽中,且连接孔与安装孔相配合,连接件穿设于连接孔和安装孔中。
12.在一种可行的实现方式中,安装支架包括:连接横杆,沿车体的横向设置;多个连接支架,连接于连接横杆的顶部,连接支架用于与车体相连接;其中,连接横杆设有多个第二导向孔,导杆机构穿设于第二导向孔中。
13.本实用新型还提供了一种无人车,包括:车体;上述任一项中的无人车防撞装置,无人车防撞装置的安装支架与车体相连接;控制器,与车体和无人车防撞装置的感应组件通信连接,以根据感应组件的感应信号控制车体制动。
14.本实用新型上述技术方案中的有益效果体现在:
15.通过改进了防撞横梁与导杆机构的连接方式,可以有效缓解防撞横梁遇到斜向碰撞力时导杆机构容易发生卡滞、锁死或变形等问题,当装配于无人车时,能够在无人车在发生碰撞时导杆机构及时带动感应组件触发感应信号,进而使无人车的控制器及时对车体进行制动,从而降低风险,减少碰撞损失。
16.在进一步的方案中,还通过改进感应组件的设置方式,提高了感应组件触发感应信号的灵敏性和准确性,使得无人车在发生碰撞时能够进一步加快感应速度,从而及时制动。另外,当无人车发生爆胎时,无人车防撞装置的安装支架能够与地面接触并起支撑作用,以对设置在无人车底部的电器件等设备起保护作用,防止电器件等设备发生碰撞而损坏。
附图说明
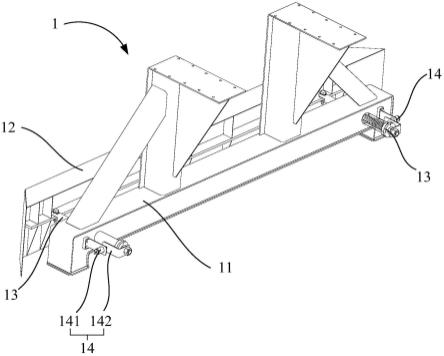
17.图1所示为本实用新型一个实施例提供的一种无人车防撞装置的结构示意图。
18.图2所示为本实用新型一个实施例提供的一种无人车的横向示意图。
19.图3所示为本实用新型一个实施例提供的一种无人车的纵向示意图。
20.图4所示为本实用新型一个实施例提供的一种无人车在爆胎状态下的横向示意图。
21.图5所示为本实用新型一个实施例提供的一种无人车在爆胎状态下的纵向示意图。
22.图6所示为本实用新型一个实施例提供的一种无人车防撞装置的防撞横梁的结构示意图。
23.图7所示为本实用新型一个实施例提供的一种无人车防撞装置在初始状态下的示
意图。
24.图8所示为本实用新型一个实施例提供的一种无人车防撞装置在斜向碰撞后的示意图。
25.图9所示为本实用新型一个实施例提供的一种无人车防撞装置在侧向视角下的部分结构的剖视图。
26.图10所示为本实用新型一个实施例提供的一种无人车防撞装置在俯视视角下的部分结构的剖视图。
27.图11所示为图9中a部分的放大图。
28.图12所示为本实用新型一个实施例提供的无人车防撞装置在感应组件在初始状态下的示意图。
29.图13所示为本实用新型一个实施例提供的无人车防撞装置在结构示意图。
30.图14所示为本实用新型一个实施例提供的一种无人车的示意框图。
31.附图标记说明:
32.1无人车防撞装置,11安装支架,111连接横杆,112连接支架,113第一连接板,114第二导向孔,12防撞横梁,121连接孔,122第二连接板,13导杆机构,131导向套,1311端盖,1312第一导向孔,132导向杆,1321凸台,1322安装槽,1323安装孔,133弹簧,14感应组件,141感应件,1411接近开关,142配合件,1421遮光板,1422透光孔,151连接件,152锁紧螺母,2无人车,21车体,22控制器,23电器设备。
具体实施方式
33.本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。本技术实施例中所有方向性指示(诸如上、下、左、右、前、后、顶、底
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
34.另外,在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
35.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
36.以下提供了本实用新型的技术方案中的无人车防撞装置和无人车的一些实施例。
37.如图1所示,在本实用新型的一个实施例中提供了一种无人车防撞装置1,包括安装支架11、防撞横梁12、导杆机构13和感应组件14。安装支架11作为无人车防撞装置1的安装基体,在装配于无人车时,通过安装支架11与无人车的车体连接。防撞横梁12位于安装支
架11远离无人车的车体的一侧,以在无人车与外界物体发生碰撞时,通过防撞横梁12与外界物体接触。在防撞横梁12朝向安装支架11的一侧,沿车体的横向间隔设有多个导杆机构13;每个导杆机构13中,一端与防撞横梁12转动连接,另一端穿过安装支架11并向远离防撞横梁12的方向延伸,以通过防撞横梁12和安装支架11对导杆机构13进行支撑。当防撞横梁12与外界物体发生碰撞时,防撞横梁12在碰撞力的作用下向靠近安装支架11的方向移动,导杆机构13能够随防撞横梁12一同移动。
38.感应组件14包括感应件141和配合件142,配合件142与导杆机构13远离防撞横梁12的一端,感应件141与配合件142对应设置,以在导杆机构13随防撞横梁12发生移动时,使感应件141触发感应信号。当装配于无人车时,感应件141能够与无人车的控制器通信连接,以将触发的感应信号传输至控制器,控制器可以根据感应信号确定发生碰撞事故,并控制无人车进行制动操作。具体地,感应件141可以与安装支架11连接,也可以与无人车的车体连接,能与配合件142相配合即可。
39.其中,每个导杆机构13与防撞横梁12均为转动连接,且至少一个导杆机构13与防撞横梁12的连接点的位置为可活动的,当防撞横梁12受到斜向碰撞力时,例如来自左前方或右前方的碰撞力时,防撞横梁12会发生倾斜,此时,该导杆机构13与防撞横梁12的连接点的位置能够在防撞横梁12上发生移动,从而减小导杆机构13发生卡滞或锁死的可能性,使得导杆机构13能够在轴向上正常移动,以使感应件141能够正常触发感应信号,进而及时进行制动。
40.可以理解,防撞横梁12、安装支架11以及多个导杆机构13连接后整体呈框架结构,防撞横梁12在受到斜向碰撞力作用时左右两端的位移量不同,即防撞横梁12会发生相对转动,而导杆机构13通常只能沿轴向移动,若每个导杆机构13与防撞横梁12的连接点的位置均为固定位置,会导致导杆机构13受到较大的侧向力作用,并与防撞横梁12的转动产生相互干涉,极易造成导杆机构13卡滞或锁死,甚至造成导杆机构13变形损坏,影响感应组件14的正常工作,导致无人车无法正常受到感应组件14的感应信号,影响制动控制,进而造成损失扩大。
41.本实施例中的无人车防撞装置1,对防撞横梁12和导杆机构13的设置方式做了改进和优化,使得防撞横梁12在受到斜向碰撞力作用时,导杆机构13仍然能够正常进行轴向运动,可以有效缓解导杆机构13容易发生卡滞、锁死甚至弯曲损坏等问题,可靠性更高,当装配于无人车时,导杆机构13能够及时带动感应组件14触发感应信号,进而使无人车的控制器及时对车体进行制动,从而降低风险,减少碰撞损失。
42.另外,本实施例中的无人车防撞装置1还具有电器设备23的保护作用。举例而言,如图2至图5所示,无人车防撞装置1通过安装支架11与无人车2的车体21连接。通常无人车2的电器设备23设置在车体21的底部。其中,电器设备23包括但不限于动力电池、电池控制器等电器件。在正常状态下,如图2和图3的示例,无人车防撞装置1与地面之间存在一定间距,以使无人车2能够正常行驶。当无人车2发生爆胎时,车体21的离地高度相应减小,此时,安装支架11能够先与地面接触并起支撑作用,以对设置在车体21底部的电器设备23起保护作用,从而防止电器设备23因发生碰撞而损坏。
43.需要说明的是,本实施例中的导杆机构13的数量可以是两个或大于两个的其他数量,具体可以根据防撞横梁12的尺寸以及具体使用需求设置。此外,与防撞横梁12的连接点
的位置可移动的导杆机构13的数量可以是一个或多个。
44.在本实用新型的一些实施例中,如图1和图6所示,防撞横梁12上与导杆机构13对应设置有多个连接孔121,每个连接孔121与一个导杆机构13相对应。导杆机构13靠近防撞横梁12的一端通过连接件151与连接孔121配合,使导杆机构13与防撞横梁12形成转动连接。其中,至少一个连接孔121位腰形孔,且腰形孔的长边沿车体的横向延伸,即沿防撞横梁12的长度方向延伸,如图7所示的状态。在防撞横梁12受到碰撞自身发生转动时,导杆机构13能够与防撞横梁12发生相对位移,即导杆机构13与防撞横梁12的连接点可以在腰形孔中移动,以防止导杆机构13与防撞横梁12发生相互干涉,以使导杆机构13能够沿轴向正常移动。
45.需要说明的是,腰形孔的长边延伸方向也可以与防撞横梁12的长度方向呈一定的倾斜角度。
46.进一步地,如图1和图6所示,导杆机构13具体为两个,且两个导杆机构13沿车体的横向间隔设置。每个导杆机构13远离防撞横梁12的一端均配置有一个感应组件14,在装配于无人车时,每个感应组件14中的感应件141均能够与无人车的控制器通信连接。当防撞横梁12受到斜向碰撞力时,若仅有一个导杆经发生轴向移动,也能够通过该导杆机构13对应的感应组件14触发感应信号。相较于现有agv中多个导杆共用一套感应元件的方案,本实施例中的方案触发感应信号的准确性及灵敏性更高,尤其是发生斜向(例如左前或右前)碰撞时,无人车的控制器获取碰撞感应信号更加及时,有利于加快制动控制的感应速度,以进一步降低碰撞损失。
47.可以理解,现有agv中采用在防撞横梁中部设置一套感应元件,并同时与两侧的导杆连接,在发生斜向碰撞时,感应元件需要足够的位移量才能够触发感应信号。在仅有一侧的导杆发生轴向位移时,若位于中部的感应元件位移量较小,不能正常触感感应信号,影响无人车的制动控制。本实施例中的方案能够有效降低发生上述问题的可能性。
48.在本实用新型的一些实施例中,如图1和图9所示,安装支架11上与导杆机构13对应设置有第二导向孔114。导杆机构13包括导向套131和导向杆132,导向套131穿设于第二导向孔114中。导向杆132穿过导向套131并向远离防撞梁的方向延伸。在感应组件14中,配合件142连接于导向杆132远离防撞横梁12的一端,感应件141与配合件142相对应,并与安装支架11相连接。当防撞横梁12受到碰撞后,导向杆132随防撞横梁12发生轴向移动,带动配合件142一同移动,当配合件142与感应件141之间的相对位移量超出设定值时,感应件141即触发感应信号。其中,配合件142的位移量的设定值可以根据使用需求进行设定。
49.进一步地,如图10所示,导杆机构13还设有弹簧133。具体地,弹簧133位于导向套131中,并套设于导向杆132上;弹簧133的一端与导向杆132连接,另一端与导向套131连接。当防撞横梁12受到碰撞时,导向杆132在防撞横梁12的带动下发生轴向移动,此时,弹簧133受力压缩,以对导向杆132起缓冲作用;当外力消失后,导向杆132还能够在弹簧133的弹力作用下复位。需要说明的是,一般物流场站常用的agv等无人车工作时的行驶速度较低,即使发生碰撞事故,通常对防撞横梁12以及导杆机构13的破环力较小,在与碰撞物分离后,导向杆132在弹簧133作用下复位,一般情况下仍然能够正常使用。因而,通过设置弹簧133能够有效缩减导向杆132和防撞横梁12复位操作所耗费的时间,有利于提高工作效率。
50.更进一步地,如图9和图10所示,导向杆132的侧壁上设有凸台1321,对应地,导向
套131远离防撞梁的一端可拆卸地设有端盖1311,端盖1311上设有与导向杆132相适配的第一导向孔1312,导向杆132远离防撞横梁12的一端由第一导向孔1312向外伸出。在导向套131中,弹簧133的一端与导向杆132的凸台1321抵接,弹簧133的另一端与端盖1311抵接;在初始状态下,可以端盖1311对弹簧133产生一定的预紧力;当导向杆132朝向端盖1311移动时,通过凸台1321和端盖1311对弹簧133形成挤压,使弹簧133压缩变形,以产生弹力对导向杆132起缓冲作用。具体地,导向杆132也可以加工呈阶梯轴结构,如图9中的示例,导向杆132靠近端盖1311的位置的直径小于靠近防撞横梁12的位置的直径,以通过阶梯轴结构形成凸台1321,以对弹簧133进行抵接。
51.在本实用新型的一些实施例中,如图6、图9和图11所示,防撞横梁12朝向安装支架11的一侧设有第二连接板122,第二连接板122沿防撞横梁12的长度方向延伸,第二连接板122上设有多个连接孔121,多个连接孔121沿防撞横梁12的长度方向间隔设置。具体地,如图6中的示例,连接孔121的数量为两个,且其中一个连接孔121为圆孔,另一个连接孔121为腰形孔;与之相对应,导杆机构13的数量也为两个,且每个导杆机构13的导向杆132靠近防撞梁的一端的端面上开设有安装槽1322。导向杆132通过安装槽1322与第二连接板122配合,即第二连接板122伸入安装槽1322中;安装槽1322的两个侧壁上均设有相对应的安装孔1323,安装孔1323与第二连接板122上的连接孔121配合,并通过连接件151穿设于连接孔121和安装孔1323中,以使导向杆132与第二连接板122形成转动连接。其中,连接件151具体可以包括销形螺栓和螺母。
52.在本实施例的另一种实现方式中,导向杆132靠近防撞横梁12的一端也可以不设置安装槽1322,导向杆132可以仅设有一个安装孔1323,导向杆132可以位于第二连接板122的上方或下方,使安装孔1323与连接孔121配合,并通过连接件151形成连接。进一步地,为了便于配合,导向杆132靠近防撞横梁12的一端还可以加工为板形结构。
53.在本实用新型的一些实施例中,如图10和图12所示,感应组件14中的配合件142具体包括遮光板1421,感应件141具体包括接近开关1411。安装支架11背向防撞横梁12的一侧设有第一连接板113,第一连接板113的一端与安装支架11固定连接,且第一连接板113整体向远离防撞横梁12的方向延伸;接近开关1411安装在第一连接板113上。与之相对应,在导杆机构13靠近第一连接板113的一侧设有遮光板1421,遮光板1421远离防撞横梁12的一端向靠近导杆机构13的方向弯折,且遮光板1421的弯折部分设有通孔,遮光板1421通过该通孔套设于导向杆132远离防撞横梁12的一端。其中,导向杆132远离防撞横梁12的一端设有螺纹,通过锁紧螺母152对遮光板1421的弯折部分进行锁紧,以使遮光板1421固定连接于导向杆132上。其中,接近开关1411的感应端朝向遮光板1421,且遮光板1421上与接近开关1411的感应端相对应的位置开设有透光孔1422。
54.在初始状态时,透光孔1422正对接近开关1411的感应端,接近开关1411发出的信号能够穿过透光孔1422;当防撞横梁12受到碰撞时,导向杆132在防撞横梁12的带动下发生轴向移动,遮光板1421随之发生移动,透光孔1422的位置发生变化,接近开关1411的信号被遮光板1421遮挡,接近开关1411随即感应到导向杆132的移动,并触发感应信号,无人车的控制器根据接近开关1411的感应信号控制车体制动。
55.在本实用新型的一些实施例中,如图9所示,安装支架11具体包括连接横杆111和连接支架112。连接横杆111与防撞横梁12对应设置,第二导向孔114均设于连接横杆111上,
第二导向孔114的具体位置与导杆机构13相对应,以使导杆机构13能够穿过第二导向孔114向远离防撞横梁12的方向延伸。连接支架112的数量可以是一个或多个;连接支架112连接于连接横杆111的顶部,具体可以焊接或螺栓连接;连接支架112向上延伸,连接支架112的顶部用于连接无人车的车体。进一步地,每个连接支架112可以包括一个或多个杆件。
56.以下为本实用新型的无人车防撞装置1的一个具体实施例:
57.如图1所示,无人车防撞装置1包括安装支架11、防撞横梁12、导杆机构13和感应组件14,可以应用于无人车,例如无人平板车、agv等物流车辆。
58.如图1和图13所示,安装支架11作为无人车防撞装置1的安装基体,具体包括连接横杆111和连接支架112。连接横杆111与防撞横梁12对应设置,连接横杆111上设有两个第二导向孔114;连接横杆111的顶部设有两个连接支架112,具体可以通过焊接或螺栓连接固定;连接支架112向上延伸,连接支架112的顶部用于连接无人车的车体。
59.如图6、图9和图13所示,防撞横梁12位于安装支架11远离无人车的车体的一侧,且防撞横梁12的长度方向沿车体的横向设置;防撞横梁12朝向安装支架11的一侧设有第二连接板122,第二连接板122沿防撞横梁12的长度方向延伸,第二连接板122上设有多个连接孔121,多个连接孔121沿防撞横梁12的长度方向间隔设置。具体地,如图6中的示例,连接孔121的数量为两个,且其中一个连接孔121为圆孔,另一个连接孔121为腰形孔。
60.导杆机构13的数量为两个,每个连接孔121与一个导杆机构13相对应。如图9和图13所示,每个导杆机构13包括导向套131、导向杆132和弹簧133。导向套131穿设于第二导向孔114中。导向杆132穿过导向套131并向远离防撞梁的方向延伸,导向套131远离防撞梁的一端可拆卸地设有端盖1311,端盖1311上设有第一导向孔1312。导向杆132穿设于导向套131中,导向杆132远离防撞横梁12的一端由第一导向孔1312向外伸出,导向杆132靠近防撞横梁12的一端的端面设有安装槽1322,第二连接板122伸入安装槽1322中,使导向杆132通过安装槽1322与第二连接板122配合;安装槽1322的两个侧壁上均设有相对应的安装孔1323,安装孔1323与第二连接板122上的连接孔121配合,并通过连接件151穿设于连接孔121和安装孔1323中,以使导向杆132与第二连接板122形成转动连接。其中,连接件151具体为销形螺栓和螺母。另外,与腰形孔连接的一个导向杆132,其与第二连接板122的连接点能够在腰形孔中移动。
61.如图9和图10所示,弹簧133位于导向套131中,并套设于导向杆132上;导向杆132呈阶梯轴结构,侧壁上形成有凸台1321;弹簧133的一端与导向杆132的凸台1321抵接,弹簧133的另一端与端盖1311抵接。在初始状态下,可以端盖1311对弹簧133产生一定的预紧力。当导向杆132朝向端盖1311移动时,通过凸台1321和端盖1311对弹簧133形成挤压,使弹簧133压缩变形,以产生弹力对导向杆132起缓冲作用。当外力消失后,导向杆132还能够在弹簧133的弹力作用下复位。
62.如图1所示,每个导杆机构13远离防撞横梁12的一端对应设置一个感应组件14。每个感应组件14包括一个感应件141和一个配合件142,其中,配合件142与导杆机构13远离防撞横梁12的一端连接,感应件141与连接横杆111相连接,并与配合件142对应设置。感应件141与配合件142之间发生相对位移时,感应件141能够触发感应信号。如图7所示,在初始状态下,感应件141与配合件142的位置处于正常范围内。如图8所示,当防撞横梁12发生斜向碰撞力f作用时,防撞横梁12的右端向靠近安装支架11的方向移动,左端由于距离碰撞力f
的作用点较远,位移量相对较小;此时,防撞横梁12自身发生转动,防撞横梁12和与腰形孔配合的导杆机构13之间发生相对位移,即二者的连接点在腰形孔中发生移动,位移量为s1;同时,与腰形孔配合的导杆机构13沿轴向向远离防撞横梁12的方向移动,并带动配合件142移动,使得配合件142与感应件141之间发生相对位移,位移量为s2,此时,感应件141触发感应信号,并传输至无人车的控制器,控制器控制车体及时制动,以减小碰撞损失。
63.如图10、图12和图13所示,感应件141具体包括接近开关1411,配合件142具体包括遮光板1421。连接横杆111背向防撞横梁12的一侧设有第一连接板113,第一连接板113的一端与连接横杆111固定连接,且第一连接板113整体向远离防撞横梁12的方向延伸;接近开关1411安装在第一连接板113上。与之相对应,在导杆机构13靠近第一连接板113的一侧设有遮光板1421,遮光板1421远离防撞横梁12的一端向靠近导杆机构13的方向弯折,且遮光板1421的弯折部分设有通孔,遮光板1421通过该通孔套设于导向杆132远离防撞横梁12的一端。其中,导向杆132远离防撞横梁12的一端设有螺纹,通过锁紧螺母152对遮光板1421的弯折部分进行锁紧,以使遮光板1421固定连接于导向杆132上。其中,接近开关1411的感应端朝向遮光板1421,且遮光板1421上与接近开关1411的感应端相对应的位置开设有透光孔1422。当遮光板1421的位置移动时,透光孔1422的位置随之改变,接近开关1411发出的光电信号受到遮挡,随即触发感应信号;接近开关1411与无人车的控制器通信连接,控制器能够接收到接近开关1411的感应信号,并控制车体及时进行制动。
64.在初始状态时,透光孔1422正对接近开关1411的感应端,接近开关1411发出的信号能够穿过透光孔1422;当防撞横梁12受到碰撞时,导向杆132在防撞横梁12的带动下发生轴向移动,遮光板1421随之发生移动,透光孔1422的位置发生变化,接近开关1411的信号被遮光板1421遮挡,接近开关1411随即感应到导向杆132的移动,并触发感应信号,无人车的控制器根据接近开关1411的感应信号控制车体制动。
65.在本实施例中,当防撞横梁12受到斜向碰撞力时,例如来自左前方或右前方的碰撞力时,通过设置导杆机构13与防撞横梁12的连接点的位置能够在防撞横梁12上发生移动,从而减小导杆机构13发生卡滞或锁死的可能性,使得导杆机构13能够在轴向上正常移动,以使感应件141能够正常触发感应信号,进而及时进行制动。此外,本实施例中的方案触发感应信号的准确性及灵敏性更高,尤其是发生斜向(例如左前或右前)碰撞时,无人车的控制器获取碰撞感应信号更加及时,有利于加快制动控制的感应速度,以进一步降低碰撞损失。
66.此外,如图2至图5所示,通常无人车2的电器设备23设置在车体21的底部,无人车防撞装置1通过安装支架11与无人车2的车体21连接。在正常状态下,如图2和图3的示例,无人车防撞装置1与地面之间存在一定间距。当无人车2发生爆胎时,车体21的离地高度相应减小,此时,安装支架11能够先与地面接触并起支撑作用,以对设置在车体21底部的电器设备23起保护作用,从而防止电器设备23因发生碰撞而损坏。
67.在本实用新型的一个实施例中还提供了一种无人车2。如图1、图2和图14所示,无人车2包括车体21、控制器22和上述任一实施例中的无人车防撞装置1。控制器22设置在车体21,用于控制车体21运行。无人车防撞装置1的安装支架11与车体21相连接,且无人车防撞装置1的感应件141与控制器22通信连接,在无人车2与外界物体发生碰撞时,通过无人车防撞装置1的防撞横梁12与外界物体发生直接接触;防撞横梁12在碰撞力的作用下能够向
靠近安装支架11的方向移动,带动导杆机构13发生轴向移动,感应组件14利用配合件142与感应件141之间的相对位移触发感应信号,控制器22接收到感应信号后即可获知防撞横梁12发生碰撞,然后及时控制车体21制动,以停止行驶,从而降低碰撞损失。其中,当防撞横梁12受到斜向(例如左前或右前)碰撞时,至少一个导杆机构13与防撞横梁12的连接点的位置可以在防撞横梁12上发生移动,使得导杆机构13仍然能够进行轴向移动,以使感应组件14能够正常触发感应信号。
68.此外,本实施例中的无人车2应具有上述任一实施例中的无人车防撞装置1的全部有益效果,在此不再赘述。
69.需要说明的是,上述任一实施例中的无人车2具体可以是无人平板车、agv等物流车辆。
70.进一步地,上述任一实施例中的无人车防撞装置1的安装位置不限于无人车的车体21的前部,也可以安装在车体21的后部或无人车的侧方。
71.以上结合具体实施例描述了本实用新型的基本原理,但是,需要指出的是,在本实用新型中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本实用新型的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本实用新型为必须采用上述具体的细节来实现。
72.本实用新型中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。还需要指出的是,在本实用新型的装置和设备中,各部件是可以分解和/或重新组合的。这些分解和/或重新组合应视为本实用新型的等效方案。
73.提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本实用新型。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本实用新型的范围。因此,本实用新型不意图被限制到在此示出的方面,而是按照与在此实用新型的原理和新颖的特征一致的最宽范围。
74.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1