泵车及其支腿系统的制作方法
1.本公开涉及泵车设备的领域,具体地,涉及泵车及其支腿系统。
背景技术:
2.泵车是利用压力将混凝土沿管道连续输送的工程机械。泵车在工作过程中,泵车的臂架由折叠状态伸展开来,为了保证泵车的整体稳定性,泵车设置有用于支撑于地面的四个支腿,四个支腿都水平伸展至其最大长度,且四个支腿中各相邻两个支腿的支撑点的连线围成一个四边形,泵车的整机重心轨迹圆位于上述四边形之内时,泵车处于稳定状态,反之则泵车可能失稳。
3.相关技术中,随着泵车的臂架越来越长,泵车的自重也越来越重,因此泵车的整机重心轨迹圆的直径越来越大,且重心向泵车的后方偏移,相应地,需要支腿水平伸出的长度越来越长,使得四个支腿形成的四边形越来越大,从而使得泵车的重心圆始终位于四边形内,以保证泵车处于稳定状态。然而,支腿伸出的长度越长,泵车工作时,占地面积越大,尤其在一些空间狭小的环境下,泵车的支腿不能完全展开,进而影响到泵车的正常使用。
技术实现要素:
4.本公开的目的是提供一种泵车及其支腿系统,能够满足在泵车的自重越来越重的情况下保证泵车处于稳定状态的需求,并且施工场地占地面积小。
5.为了实现上述目的,提供一种泵车的支腿系统,所述泵车包括车身,所述支腿系统包括位于所述车身的前部的两个前置支腿和位于所述车身的中部的两个中置支腿,所述支腿系统还包括位于所述车身的后部的多个后置支腿,所述两个前置支腿、所述两个中置支腿和所述多个后置支腿中相邻的两个支腿的支撑点之间的连线形成多边形,其中,所述泵车的整机重心轨迹圆位于所述多边形所围成的空间内。
6.可选地,所述后置支腿沿水平方向可转动地连接于所述车身。
7.可选地,所述后置支腿的数量为两个,且两个所述后置支腿关于所述车身的横向对称布置。
8.可选地,所述后置支腿包括相连接的水平段和竖直段,所述水平段沿水平方向延伸并且构造为沿所述水平方向可伸缩,所述竖直段沿竖直方向延伸并且构造为沿所述竖直方向可伸缩。
9.可选地,所述后置支腿包括相连接的水平段和竖直段,所述水平段沿水平方向延伸并且包括相对的第一端和第二端,所述竖直段沿竖直方向延伸并且连接于所述第一端,所述第二端绕所述车身的纵向轴线可转动地连接于所述车身。
10.可选地,所述支腿系统还包括锁止件,该锁止件用于锁止所述第二端绕所述纵向轴线的转动。
11.可选地,所述支腿系统包括监测装置和控制装置,所述监测装置用于实时监测所述后置支腿的周边障碍物,所述控制装置用于根据所述监测装置的监测信号控制所述后置
支腿的运动。
12.可选地,所述监测装置为红外测距仪。
13.可选地,所述后置支腿还设置有照明灯。
14.根据本公开的第二个方面,提供一种泵车,包括如上所述的支腿系统。
15.通过上述技术方案,在泵车中,由于泵车自重越来越重,因此泵车的整机重心轨迹圆的中心也向车身后方偏移,基于此,本公开在泵车的车身后部设置有后置支腿,使得后置支腿、前置支腿和中置支腿相邻的两个支腿的支撑点之间连线形成的多边形的中心也向后偏移,更容易使整机重心轨迹圆处于该多边形之内,另一方面,多个后置支腿也增加了多边形的边长数量,边长的数量越多,在不增长原有支腿水平伸出长度的情况下,更容易将整机重心轨迹圆包括在多边形的内部,这使得泵车在施工场地占地面积小。
16.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
17.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
18.图1是本公开实施例提供的泵车的整体结构示意图;
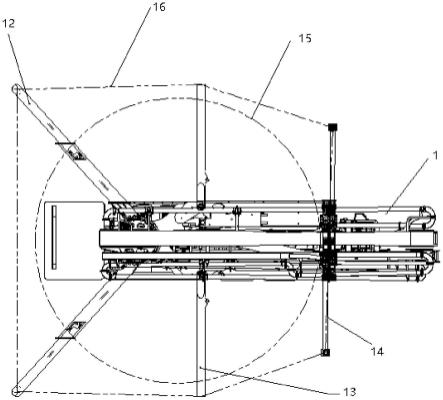
19.图2是本公开实施例提供的泵车的支腿系统展开状态的结构示意图;
20.图3是本公开实施例提供的泵车的支腿系统的后置支腿的部分结构示意图。
21.附图标记说明
22.1、车身;12、前置支腿;13、中置支腿;14、后置支腿;141、水平段;142、竖直段;15、整机重心轨迹圆;16、多边形。
具体实施方式
23.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
24.在本公开中,在未作相反说明的情况下,使用的方位词如“上、下”通常是指相应部件处于使用状态时在重力方向上的“上、下”,“前、后”是泵车沿自身长度方向的“前、后”。此外,本公开所使用的术语“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。此外,在下面的描述中,当涉及到附图时,除非另有解释,不同的附图中相同的附图标记表示相同或相似的要素。上述定义仅用于解释和说明本公开,不应当理解为对本公开的限制。
25.参考图1和图2中所示,为了实现上述目的,提供一种泵车的支腿系统,泵车包括车身1,支腿系统包括位于车身1的前部的两个前置支腿12和位于车身1的中部的两个中置支腿13,支腿系统还包括位于车身1的后部的多个后置支腿14,两个前置支腿12、两个中置支腿13和多个后置支腿14中相邻的两个支腿的支撑点之间的连线形成多边形16,其中,泵车的整机重心轨迹圆15位于多边形16所围成的空间内。
26.通过上述技术方案,在泵车中,由于泵车自重越来越重,因此泵车的整机重心轨迹圆15的中心也向车身1后方偏移,基于此,本公开在泵车的车身1后部设置有后置支腿14,使得后置支腿14、前置支腿12和中置支腿13相邻的两个支腿的支撑点之间连线形成的多边形
16的中心也向后偏移,更容易使整机重心轨迹圆15处于该多边形16之内,另一方面,多个后置支腿14也增加了多边形16的边长数量,边长的数量越多,在不增长原有支腿水平伸出长度的情况下,更容易将整机重心轨迹圆15包括在多边形16的内部,这使得泵车在施工场地占地面积小。
27.在此,想要解释的是,上述术语“重心轨迹圆”是泵车领域中的专业术语,泵车在工作时,泵车的臂架绕其回转中心转动,则泵车的整车的重心也随着臂架的转动而移动,通过计算,可以得出泵车重心的移动轨迹,泵车重心移动的轨迹为该泵车的重心轨迹圆。
28.在本公开提供的具体实施方式中,后置支腿14可以以任意合适的方式连接于车身1。作为一种可选的实施方式,后置支腿14可以沿水平方向可转动地连接于车身1。后置支腿14可以沿水平方向转动,则后置支腿14的支撑点的位置可以根据现场的环境灵活选择。
29.在一些其它实施例中,后置支腿14还可以沿车身1的长度方向滑动连接于车身1,这样,后置支腿14的支撑范围更广,更有利于操作人员选择合适的支撑位置支撑泵车。
30.参考图2中所示,作为一种可选的实施方式,后置支腿14的数量为两个,且两个后置支腿14关于车身1的横向对称布置。其中,两个前置支腿12和两个中置支腿13也关于车身1的横向对称布置,前置支腿12、中置支腿13和后置支腿14的六个支点的连线形成六边形,该六边形将整机重心轨迹圆15包围在内。此外,在本公开中,后置支腿14的数量不限于两个,可以是三个、四个、五个等,本公开对此不作具体限制。
31.参考图2和图3中所示,作为一种可选的实施方式,后置支腿14包括相连接的水平段141和竖直段142,水平段141沿水平方向延伸并且构造为沿水平方向可伸缩,竖直段142沿竖直方向延伸并且构造为沿竖直方向可伸缩。其中,在泵车工作前,水平段141通过油缸沿水平方向伸出,使水平段141伸出至最大伸出长度,然后竖直段142通过油缸沿竖直方向向下伸出,以支撑于地面。在本公开中,前置支腿12和中置支腿13可以与后置支腿14具有相同的结构,本公开对此不作具体限制。此外,前置支腿12可以构造为沿水平方向可转动地连接于车身,并且/或者,前置支腿12也可以构造为包括可沿水平方向可伸缩的第一段支腿并且包括可沿竖直方向可伸缩的第二段支腿,本公开对此也不作具体限制。同理,中置支腿13也可以构造为沿水平方向可转动地连接于车身1,并且/或者,中置支腿13也可以构造为包括可沿水平方向可伸缩的第一段支腿并且包括可沿竖直方向可伸缩的第二段支腿,本公开对此不作具体限制。
32.在泵车处于行驶状态或者闲置状态时,参考图1中所示,前置支腿12、中置支腿13和后置支腿14均收回于车身,即,在此状态下,前置支腿12、中置支腿13和后置支腿14各自的支撑点均处于悬空状态,并且前置支腿12和后置支腿14各自的水平段支腿均朝向车身1缩回,中置支腿13沿水平方向转动而位于车身1上。在泵车处于工作状态时,前置支腿12、中置支腿13后置支腿14各自的支撑点支撑于地面,参考图2中所示。
33.作为一种可选的实施方式,后置支腿14包括相连接的水平段141和竖直段142,水平段141沿水平方向延伸并且包括相对的第一端和第二端,竖直段142沿竖直方向延伸并且连接于第一端,第二端绕车身1的纵向轴线可转动地连接于车身1。这样,后置支腿14的水平段141和竖直段142的机械结构简单,也就是说,水平段141和竖直段142都不需要设计实现伸缩的机械部件和结构,只需水平段141绕车身1的纵向轴线转动即可,且后置支腿14在收缩状态时,后置支腿14的竖直段142在水平方向上的投影不超出车身1的边缘。
34.作为一种可选的实施方式,支腿系统还包括锁止件,该锁止件用于锁止第二端绕纵向轴线的转动。当水平段141转动到预定位置后,锁止件用于限制水平段141转动,这样,当泵车处于转场或行驶状态时,后置支腿14不会在泵车的行驶过程中在惯性力或者外力的作用下发生转动,进而保证泵车的安全行驶,或者,当后置支腿14支撑于地面时,后置支腿14不会在车身1自重的作用下转动。
35.其中,锁止件可以以任意合适的方式构造。例如,该锁止件可以构造为活动地安装于车身1的锁销,当后置支腿14转动至设定角度时,该锁销运动至锁定第二端的转动。此外,该锁止件还可以构造为电磁锁止装置,该电磁锁止装置能够在通电的状态下磁吸附水平段141的转轴,使得该转轴不能够转动,从而锁止第二端绕纵向轴线的转动。在本公开中,锁止件还可以是本领域中任意能够锁止转轴转动的锁止结构,本公开对此不作具体限制。
36.作为一种可选的实施方式,支腿系统包括监测装置和控制装置,监测装置用于实时监测后置支腿14的周边障碍物,控制装置用于根据监测装置的监测信号控制后置支腿14的运动。监测装置和控制装置的配合可以使后置支腿14在展开支撑的过程中,遇到移动的物体进入到后置支腿14的活动范围内,控制装置可以自动做出停止的动作,增加了人工操作的容错率。
37.作为一种可选的实施方式,监测装置为红外测距仪。在一些其它实施例中,监测装置还可以是影像监测装置,对此,本公开不做限制。
38.作为一种可选的实施方式,后置支腿14还设置有照明灯。照明灯为泵车在光线不足的环境下提供光源,便于操作者操作,后置支腿14还可以设置荧光条。
39.本公开还提供了一种泵车,包括如上所述的支腿系统,因此同样具有上述特点,为了避免重复,在此不再描述。
40.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
41.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
42.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1