一种车辆的控制系统及车辆的制作方法
本申请实施例涉及汽车,具体而言,涉及一种车辆的控制系统及车辆。
背景技术:
1、在现有的汽车中,驾驶员在驾驶汽车的时候,位于汽车a柱处遮挡驾驶员的实现,导致出现视野盲区。
2、位于汽车a柱处的视野盲区不但会对路面上的行人车辆产生安全威胁,对车辆的驾驶员自身也存在较大的安全隐患。
技术实现思路
1、本申请实施例提供一种车辆的控制系统及车辆,旨在解决汽车a柱处的视野盲区对路面上的行人和车辆的驾驶员存在安全隐患的问题。
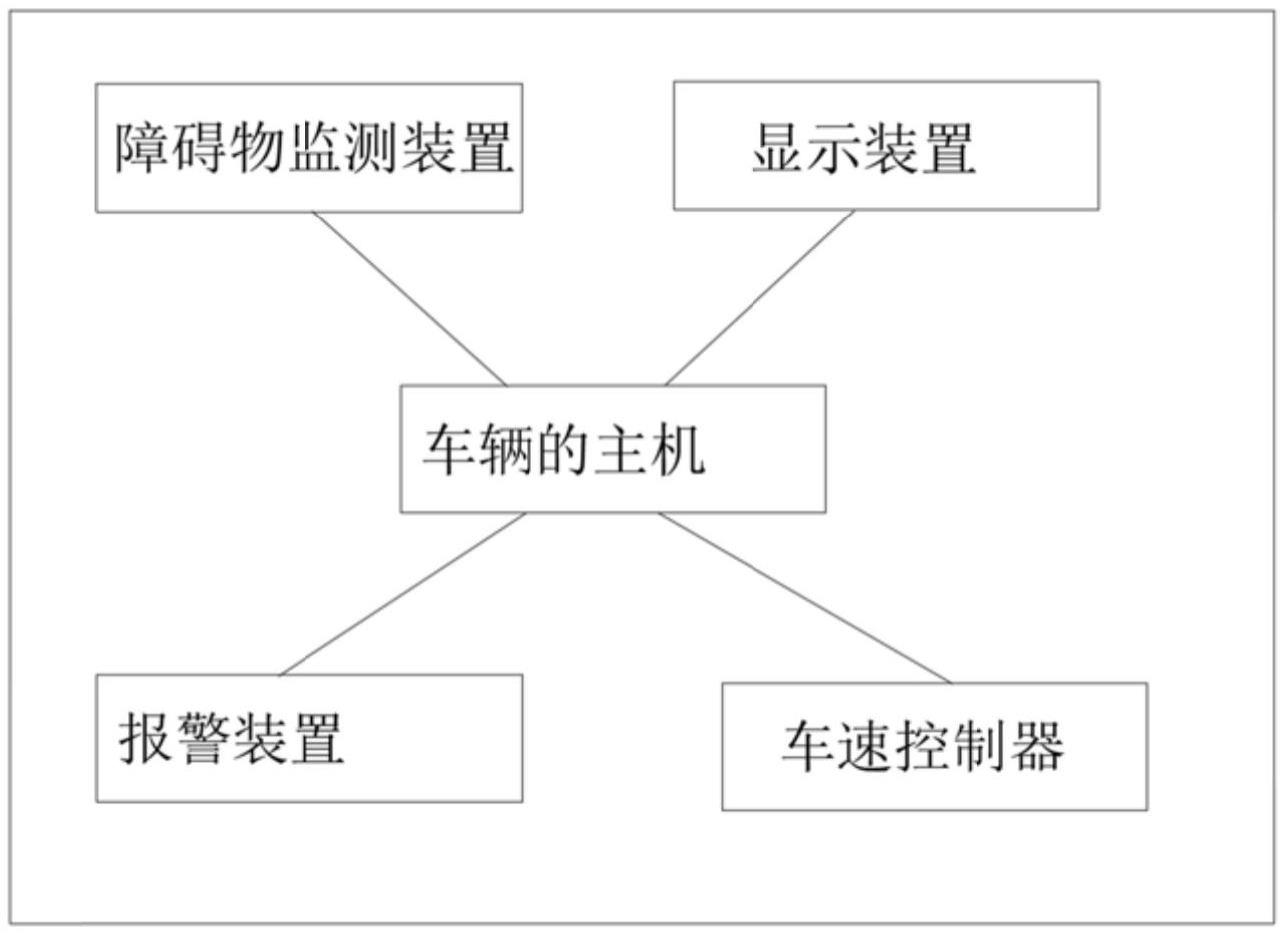
2、本申请实施例第一方面提供一种车辆的控制系统,所述系统包括:
3、障碍物监测装置,所述障碍物监测装置安装于车辆上,所述障碍物监测装置用于获取位于所述车辆的a柱盲区内的障碍物信息,所述障碍物监测装置与所述车辆的主机连接,以向所述车辆的主机传输获取的所述障碍物信息;
4、其中,所述障碍物信息包括障碍物距离,所述障碍物距离为所述车辆的a柱盲区内的障碍物与所述车辆之间的距离;
5、车速控制器,所述车速控制器与所述车辆的主机连接;
6、在所述车辆的主机接收到所述障碍物距离小于第一预设距离时,所述车辆的主机控制所述车速控制器,以使所述车辆减速。
7、可选地,在所述车辆的主机接收到所述障碍物距离小于所述第二预设距离时,所述车辆的主机控制所述车速控制器,以使所述车辆减速直至停车;
8、在所述车辆的主机接收到所述障碍物距离小于所述第一预设距离且大于第二预设距离时,所述车辆的主机控制所述车速控制器,以使所述车辆减速,直至安全经过所述障碍物;
9、其中,所述第二预设距离小于所述第一预设距离。
10、可选地,在所述车辆的主机接收到所述障碍物距离大于所述第一预设距离时,所述车辆的主机不对所述车速控制器进行控制。
11、可选地,所述系统还包括:
12、报警装置,所述报警装置安装于车辆的驾驶舱内,所述报警装置与所述车辆的主机连接,以在所述车辆的主机接收到所述障碍物距离小于所述第一预设距离时,对车辆内的驾驶员进行警示。
13、可选地,所述报警装置包括:
14、报警指示灯,所述报警指示灯包括至少三种颜色状态;
15、其中,在所述车辆的主机接收到所述障碍物距离小于所述第二预设距离时、在所述障碍物距离小于所述第一预设距离且大于所述第二预设距离时、在所述障碍物距离大于所述第一预设距离时,所述报警指示灯分别处于不同的颜色状态。
16、可选地,所述报警装置还包括:
17、警示喇叭,所述警示喇叭包括至少三种声音模式;
18、其中,在所述车辆的主机接收到所述障碍物距离小于所述第二预设距离时、在所述障碍物距离小于所述第一预设距离且大于所述第二预设距离时、在所述障碍物距离大于所述第一预设距离时,所述警示喇叭分别处于不同的声音模式。
19、可选地,所述障碍物监测装置包括:至少两种雷达,所述至少两种雷达安装于所述车辆的a柱上,用于采集车辆行驶过程中位于车辆的a柱前方的所述障碍物信息;
20、所述至少两种雷达与车辆的主机连接,以将采集到的所述障碍物信息传输至车辆的主机。
21、可选地,所述至少两种雷达包括:
22、超声波雷达,毫米波雷达;
23、其中,所述超声波雷达设于所述车辆的a柱位置,用于采集车辆的a柱前方的第一障碍物信息,所述超声波雷达与所述车辆的主机连接,以将所述第一障碍物信息传输至所述车辆的主机;
24、毫米波雷达,所述毫米波雷达设于所述车辆的a柱位置,所述毫米波雷达用于采集车辆的a柱前方的第二障碍物信息,所述毫米波雷达与所述车辆的主机连接,以将所述第二障碍物信息传输至所述车辆的主机。
25、可选地,所述系统还包括:
26、显示装置,所述障碍物监测装置与所述车辆的主机的输入端连接,所述显示装置与所述车辆的主机的输出端连接,以将采集到的所述障碍物信息传输至所述显示装置上进行显示。
27、本申请实施例第二方面提供一种车辆,包括如本申请实施例第一方面提供的车辆的控制系统。
28、采用本申请提供的一种车辆的控制系统及车辆,具有以下有益效果:
29、障碍物监测装置可在车辆行驶过程中实时对车辆的a柱前方的障碍物进行监测,获取到障碍物信息,进而得到障碍物与车辆之间的距离,在得到障碍物距离后,将其传输至车辆的主机,车辆的主机可根据障碍物距离判断车辆距离a柱盲区内的障碍物的距离,若距离过近小于第一预设距离,则对车辆进行减速,大大提高了车辆在行驶过程中的安全性。
技术特征:
1.一种车辆的控制系统,其特征在于,所述系统包括:
2.根据权利要求1所述的车辆的控制系统,其特征在于,在所述车辆的主机接收到所述障碍物距离小于第二预设距离时,所述车辆的主机控制所述车速控制器,以使所述车辆减速直至停车;
3.根据权利要求2所述的车辆的控制系统,其特征在于,在所述车辆的主机接收到所述障碍物距离大于所述第一预设距离时,所述车辆的主机不对所述车速控制器进行控制。
4.根据权利要求3所述的车辆的控制系统,其特征在于,所述系统还包括:
5.根据权利要求4所述的车辆的控制系统,其特征在于,所述报警装置(2)包括:
6.根据权利要求4所述的车辆的控制系统,其特征在于,所述报警装置(2)还包括:
7.根据权利要求1所述的车辆的控制系统,其特征在于,所述障碍物监测装置(1)包括:至少两种雷达,所述至少两种雷达安装于所述车辆的a柱(3)上,用于采集车辆行驶过程中位于车辆的a柱(3)前方的所述障碍物信息;
8.根据权利要求7所述的车辆的控制系统,其特征在于,所述至少两种雷达包括:
9.根据权利要求1所述的车辆的控制系统,其特征在于,所述系统还包括:
10.一种车辆,其特征在于,所述车辆包括如权利要求1-9任一项所述的车辆的控制系统。
技术总结
本申请在于提供一种车辆的控制系统及车辆,所述系统包括:障碍物监测装置,所述障碍物监测装置安装于车辆上,所述障碍物监测装置用于获取位于所述车辆的A柱盲区内的障碍物信息,所述障碍物监测装置与所述车辆的主机连接,以向所述车辆的主机传输获取的所述障碍物信息;其中,所述障碍物信息包括障碍物距离,所述障碍物距离为所述车辆的A柱盲区内的障碍物与所述车辆之间的距离;车速控制器,所述车速控制器与所述车辆的主机连接;在所述车辆的主机接收到所述障碍物距离小于第一预设距离时,所述车辆的主机控制所述车速控制器,以使所述车辆减速。本申请旨在解决汽车A柱处的视野盲区对路面上的行人和车辆的驾驶员存在安全隐患的问题。
技术研发人员:王飞
受保护的技术使用者:长城汽车股份有限公司
技术研发日:20221123
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!