一种双轮平衡机器人底盘
本技术涉及一种机器人平衡底盘结构,特别是关于一种双轮平衡机器人底盘。
背景技术:
1、平衡底盘的主要特征是使用双轮驱动,建立倒立摆模型控制平衡,相比于四轮底盘的转向困难,双轮底盘具有更高的机动性,更加灵活。其原理主要是建立在一种被称为“动态稳定”的基础原理上,也就是车辆本身的自动平衡能力,通过内置的精密固态陀螺仪来判断车身所处的姿势状态,在精密且高速的中央微处理器计算出适合的指令后,驱动马达来做到平衡的效果。而且现有的平衡底盘减震通常是直接利用轮胎的弹性来减震,但这样的减震效果不好,如果遇到崎岖不平的道路,平衡底盘上搭载的其他工作平台有巨大抖动影响使用。现有平衡底盘悬挂结构多为横臂独立悬挂和单纵臂独立悬挂,横臂悬挂会改变轮距,标准型纵臂独立悬挂会使两轮轴向错位,影响控制效果。
技术实现思路
1、针对上述问题,本实用新型的目的是提供一种双轮平衡机器人底盘,其适用于地面平整度较差时平衡性能较高的小型机器人,搭载使用埃文斯连杆的双摇臂单纵臂独立悬挂系统,具有低成本而且平衡性能良好,对控制效果影响小的优点。
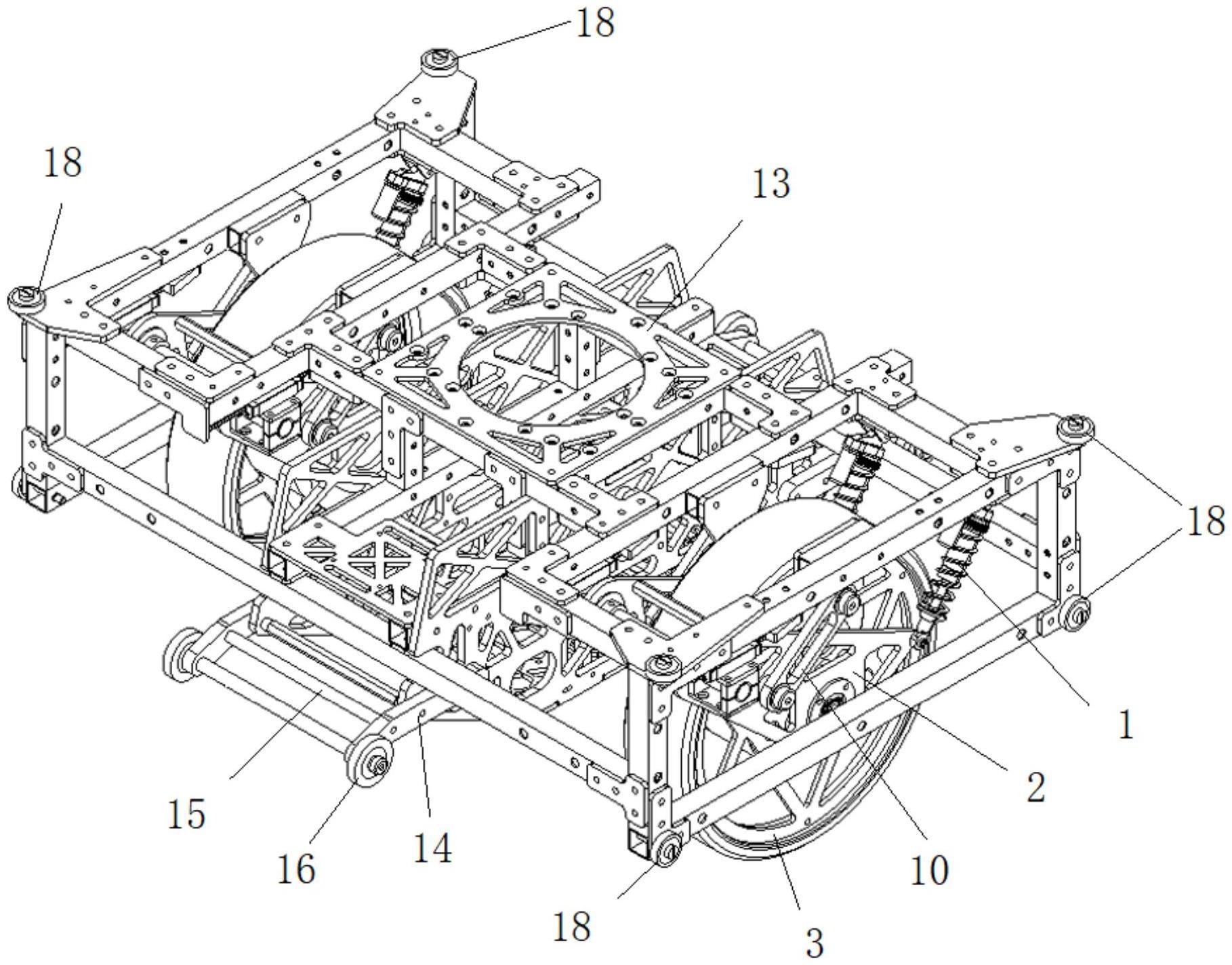
2、为实现上述目的,本实用新型采取以下技术方案:一种双轮平衡机器人底盘,其包括:主体框架,由铝方管制成,包括位于两侧的连接部和位于中部的支撑部,两侧的所述连接部以所述支撑部为中心呈对称设置,所述支撑部用于与机器人连接;双轮悬挂机构,设置为两个,分别设置在所述主体框架的所述连接部,用于行走并减震;辅助轮机构,设置为两个,对称设置在所述主体框架的前部和后部,位于所述支撑部的下方。
3、进一步,所述双轮悬挂机构包括:全金属负压避震器,设置为两个,分别位于胶轮的两侧;且每个所述全金属负压避震器的一端与所述主体框架的所述连接部连接;摆臂,设置为两个,构成双摇臂结构,分别位于胶轮的两侧;所述摆臂的一端与所述全金属负压避震器的另一端连接,两个所述摆臂的另一端经悬挂滑动结构连接,构成埃文斯连杆机构;驱动电机,通过轴承与法兰连接于胶轮中心处,与所述胶轮采用内侧向啮合以驱动所述胶轮动作;所述驱动电机的底部固定在位于内侧的所述摆臂的中部。
4、进一步,所述悬挂滑动结构包括:碳管,两端通过法兰轴承与所述摆臂的另一端连接,并在所述摆臂另一端的外侧设置有安装座,所述碳管的两端分别与安装座连接;双通六角铝柱,位于两个所述摆臂的另一端之间,并与所述碳管平行设置;悬挂滑块,设置在所述安装座的顶部,与所述主体框架的所述连接部滑动连接;悬挂连杆,其一端通过轴承与所述摆臂的后部连接,另一端通过轴承与所述主体框架的所述连接部连接。
5、进一步,所述摆臂与所述驱动电机通过螺栓固定连接,另一所述摆臂通过轮系法兰与所述胶轮固定。
6、进一步,所述悬挂滑块与所述主体框架的所述连接部上的直线导轨配合,进行滑动连接。
7、进一步,所述支撑部包括底板、侧板和顶板;所述侧板设置为两块,与所述连接部平行设置,所述底板设置在两所述侧板的底部,所述顶板设置在两所述侧板的顶部。
8、进一步,所述辅助轮机构包括:辅助杆,设置为两个,每个所述辅助杆的后端与所述支撑部的侧板固定连接,两个所述辅助杆的前端之间设置有双通铝柱;包胶轴承,设置在每个所述辅助杆的前端。
9、进一步,位于前部的所述辅助轮机构还包括前底板;所述前底板一端与所述支撑部的底板前端通过金属合页连接,所述前底板的另一端与位于后部的所述双通铝柱活动连接。
10、进一步,所述包胶轴承过螺栓固定在所述辅助杆的前端。
11、进一步,所述主体框架的拐角处都设置有胶轮轴承。
12、本实用新型由于采取以上技术方案,其具有以下优点:本实用新型采用双轮悬挂机构,轮组可以竖直上下,使驱动轮轴始终与中轴线相交;具有较好的减震效果,且成本低而且平衡性能良好。
技术特征:
1.一种双轮平衡机器人底盘,其特征在于,包括:
2.如权利要求1所述双轮平衡机器人底盘,其特征在于,所述双轮悬挂机构包括:
3.如权利要求2所述双轮平衡机器人底盘,其特征在于,所述悬挂滑动结构包括:
4.如权利要求2所述双轮平衡机器人底盘,其特征在于,所述摆臂与所述驱动电机通过螺栓固定连接,另一所述摆臂通过轮系法兰与所述胶轮固定。
5.如权利要求3所述双轮平衡机器人底盘,其特征在于,所述悬挂滑块与所述主体框架的所述连接部上的直线导轨配合,进行滑动连接。
6.如权利要求1所述双轮平衡机器人底盘,其特征在于,所述支撑部包括底板、侧板和顶板;所述侧板设置为两块,与所述连接部平行设置,所述底板设置在两所述侧板的底部,所述顶板设置在两所述侧板的顶部。
7.如权利要求1所述双轮平衡机器人底盘,其特征在于,所述辅助轮机构包括:
8.如权利要求7所述双轮平衡机器人底盘,其特征在于,位于前部的所述辅助轮机构还包括前底板;所述前底板一端与所述支撑部的底板前端通过金属合页连接,所述前底板的另一端与位于后部的所述双通铝柱活动连接。
9.如权利要求7所述双轮平衡机器人底盘,其特征在于,所述包胶轴承过螺栓固定在所述辅助杆的前端。
10.如权利要求1所述双轮平衡机器人底盘,其特征在于,所述主体框架的拐角处都设置有胶轮轴承。
技术总结
本技术涉及一种双轮平衡机器人底盘,其包括:主体框架,由铝方管制成,包括位于两侧的连接部和位于中部的支撑部,两侧的所述连接部以所述支撑部为中心呈对称设置,所述支撑部用于与机器人连接;双轮悬挂机构,设置为两个,分别设置在所述主体框架的所述连接部,用于行走并减震;辅助轮机构,设置为两个,对称设置在所述主体框架的前部和后部,位于所述支撑部的下方。本技术适用于地面平整度较差时平衡性能较高的小型机器人,成本低而且平衡性能良好。
技术研发人员:李和洋,马晨,郭泽堃,张莹,黄小龙,李浩
受保护的技术使用者:北京信息科技大学
技术研发日:20221123
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!