刹车控制装置和刹车控制方法与流程
本发明涉及刹车控制装置的结构及其控制,特别涉及能够有效抑制对于行驶中的台阶、凹凸下道等产生的车体振动的技术。
背景技术:
1、伴随电子控制悬架的进化,作为提高汽车的乘坐舒适度的要素技术之一,正在进行通过刹车控制实现的车体振动抑制技术的开发。在有台阶、凹凸的道路行驶时,小的振动通过发动机转矩的控制、大的振动通过增加刹车控制来提高乘坐舒适度。
2、作为本技术领域的背景技术,例如有专利文献1那样的技术。在专利文献1中,公开有用于缓和走过台阶时的冲击的电动刹车器的控制装置。
3、在该现有技术(专利文献1)中,当利用路面检测传感器检测出台阶时,通过运算刹车器的制动量、时刻,在翻越台阶之前对全轮进行刹车,以扬头(nose up,车头向上扬起)的状态开过台阶,从而缓和翻越台阶时的冲击。
4、此外,在专利文献2中,公开有能够在大的车辆举动时尝试进行举动抑制的刹车控制装置。
5、在该现有技术(专利文献2)中,对俯仰(pitch)运动的抑制,不通过避震器(shockabsorber)的动作来进行,而通过根据车辆的俯仰角速度的变化制动车轮来实现。
6、现有技术文献
7、专利文献
8、专利文献1:日本特开2003-72535号公报
9、专利文献2:日本特开2011-140303号公报
技术实现思路
1、发明所要解决的技术课题
2、但是,在应用上述专利文献1、专利文献2那样的控制的电动刹车装置中,为了不依赖驾驶员的刹车踏板操作地产生制动力,具有设置用于将刹车片向刹车盘按压的动力源的机构。
3、作为该机构,有由设置于各轮的电机和减速机构成、利用旋转/直动转换机构由直动的活塞进行按压的电动机构;由电动泵和阀构成、利用液压由直动的活塞进行按压的液压机构。
4、在这些系统中,刹车控制装置根据车辆的举动来运算使各轮产生的需求制动力等控制量,液压机构、电动机构基于该控制量被控制,刹车片使车轮产生制动力。
5、在这样的结构的情况下存在下述情况:对于用于根据需求制动力驱动电机、产生用于按压活塞的力的制动指令,电机的响应延迟、液压的传递延迟等,由此在达到指令要求的制动力之前发生延迟。
6、因此,上述专利文献1、专利文献2中记载的方法存在对于台阶等凹凸不能在恰当的时刻执行制动,不仅不能充分获得冲击缓和效果、俯仰抑制效果,而且由于在与通过台阶无关的时刻产生制动力,使驾驶员感到不协调的可能性。
7、因此,本发明的主要目的在于,提供能够有效地抑制在有台阶、凹凸的道路行驶时产生的车体振动的高性能的刹车控制装置和刹车控制方法。
8、用于解决问题的技术方案
9、为了解决上述问题,本发明的特征在于,包括:根据作为设置于车辆的多个车轮中的任一者的第1车轮的举动来推测行驶环境的行驶环境推测部;和基于车速来运算与所述第1车轮不同的第2车轮受到所述行驶环境的影响的时刻的时刻运算部,基于所述行驶环境推测部的推测结果和所述时刻运算部的运算结果,控制所述多个车轮的任一个车轮的制动。
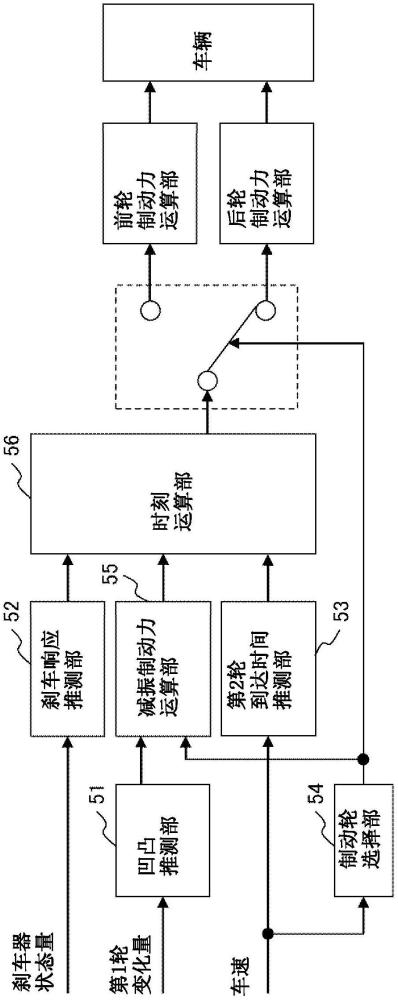
10、此外,本发明的特征在于,包括以下步骤:(a)检测第1车轮的上下运动,基于该检测得到的数据来推测路面的台阶或凹凸的步骤;(b)推测刹车器的响应延迟的步骤;(c)对所述(a)步骤中推测得到的台阶或凹凸、推测从所述第1车轮的通过直至第2车轮到达的时间的步骤;(d)基于车辆的行进方向和所述第1车轮的状态来选择成为制动对象的制动轮的步骤;(e)运算在所述第2车轮到达所述台阶或凹凸时对所述(d)步骤中选择的制动轮施加的制动力的步骤;(f)根据所述(b)步骤中推测得到的所述刹车器的响应延迟和所述(c)步骤中推测得到的时间,运算所述制动轮的制动开始时刻的步骤;和(g)在所述(f)步骤中运算出的制动开始时刻,对所述制动轮施加所述(e)步骤中运算得到的制动力的步骤。
11、发明效果
12、根据本发明,能够实现能够有效地抑制在有台阶、凹凸的道路行驶时产生的车体振动的高性能的刹车控制装置和刹车控制方法。
13、由此,能够得到通过抑制驾驶员的视点的变化所带来的行驶的安全性的提高、通过车体的振动的抑制带来的乘坐舒适度的提高、晕车的减少等效果。
14、上述以外的课题、结构和效果,能够通过以下的实施方式的说明而明确。
技术特征:
1.一种刹车控制装置,其特征在于,包括:
2.如权利要求1所述的刹车控制装置,其特征在于:
3.如权利要求1所述的刹车控制装置,其特征在于:
4.如权利要求1所述的刹车控制装置,其特征在于:
5.如权利要求1所述的刹车控制装置,其特征在于:
6.如权利要求1所述的刹车控制装置,其特征在于:
7.如权利要求1所述的刹车控制装置,其特征在于:
8.如权利要求1所述的刹车控制装置,其特征在于:
9.如权利要求1所述的刹车控制装置,其特征在于:
10.一种刹车控制方法,其特征在于,包括以下步骤:
11.如权利要求10所述的刹车控制方法,其特征在于,包括:
12.如权利要求10所述的刹车控制方法,其特征在于,包括:
技术总结
本发明提供高性能的刹车控制装置及刹车控制方法,能够有效地抑制在有台阶、凹凸的道路行驶时产生的车体振动。刹车控制装置的特征在于,包括:根据作为设置于车辆的多个车轮中的任一者的第1车轮的举动来推测行驶环境的行驶环境推测部;和基于车速来运算与所述第1车轮不同的第2车轮受到所述行驶环境的影响的时刻的时刻运算部,基于所述行驶环境推测部的推测结果和所述时刻运算部的运算结果,控制所述多个车轮的任一个车轮的制动。
技术研发人员:伊藤贵广,臼井拓也,后藤大辅
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!