控制装置的制作方法
本公开涉及车辆的控制装置。
背景技术:
1、以往提出了各种通过车载系统来自动地进行车道变更控制的技术。例如,专利文献1所记载的自动驾驶装置在检测出本车辆正在行驶的车道拥挤时,进行控制以使得本车辆向其他的车道进行车道变更。
2、专利文献1:日本特开2011-162132号公报
3、例如,可能存在本车辆在未对驾驶员要求周边监视义务的自动驾驶中,遇到需要或推荐车道变更的场景、驾驶员想要进行车道变更的场景。这里,执行基于车载系统的自动的车道变更控制时的交通环境是各种各样的。具体而言,例如,车道变更时的本车辆的行为、实际进行车道变更所需要的时间能够根据本车辆的车速、本车辆当前正在行驶的道路中的交通状况等而变化。
技术实现思路
1、本公开是鉴于上述例示的情况等而完成的。即,本公开例如提供提高能够进行基于车载系统的自动的车道变更控制的车辆的便利性的技术。
2、根据本公开的一个观点,控制装置被构成为能够执行能够自动驾驶的车辆中的车道变更控制,该车道变更控制是用于车道变更的驾驶控制并且至少包括自动转向操纵控制。
3、该控制装置具备:
4、处理器;以及
5、作为非过渡性有形存储介质的存储器,存储由上述处理器使用的数据以及程序命令,
6、上述处理器被构成为:
7、通过执行存储于上述存储器的上述程序命令,来在第一情况下或者第二情况下,即使在没有周边监视义务的自动驾驶中驾驶员进行车道变更的执行开始指示,也限制上述车道变更控制,其中,上述第一情况是距驾驶自动化等级变化的转移区域在规定距离以内或规定时间以内,上述第二情况是在车道变更目的地区域存在合流地点或弯道地点。
8、根据本公开的另一个观点,控制装置被构成为能够执行能够自动驾驶的车辆中的超车控制,该超车控制是用于超车的驾驶控制并且至少包括自动转向操纵控制。
9、该控制装置具备:
10、一个以上的处理器;以及
11、作为非过渡性有形存储介质的一个以上的存储器,存储由上述处理器使用的数据以及程序命令,
12、上述处理器被构成为:
13、通过执行存储于上述存储器的上述程序命令,来在再次车道变更地点距驾驶自动化等级变化的转移区域在规定距离以内或规定时间以内的情况下,或者在上述再次车道变更地点中的车道变更目的地区域存在合流地点或弯道地点的情况下,限制上述超车控制,其中,上述再次车道变更地点是进行再次车道变更的预定的地点,上述再次车道变更用于在从上述超车控制开始前的上述车辆的行驶中车道亦即本车道为了超车而向相邻车道进行车道变更之后恢复到上述本车道。
14、根据本公开的又一观点,控制装置是被构成为能够自动驾驶且能够执行超车控制的车辆的控制装置,上述超车控制是用于超车的驾驶控制并且至少包括自动转向操纵控制,其中,上述控制装置具备:
15、一个以上的处理器;以及
16、作为非过渡性有形存储介质的一个以上的存储器,存储由上述处理器使用的数据以及程序命令,
17、上述处理器被构成为:
18、通过执行存储于上述存储器的上述程序命令,来在没有周边监视义务的自动驾驶中驾驶员进行上述超车控制的执行开始指示的情况下,在上述超车控制中的车道变更时执行催促上述驾驶员进行周边监视的报告。
19、此外,在申请书类中的各栏中,有时对各要素标注带括弧的参照附图标记。在该情况下,参照附图标记仅表示该要素与后述的实施方式中记载的具体的结构的对应关系的一个例子。因此,本公开并不由参照附图标记的记载进行任何限定。
技术特征:
1.一种控制装置(18),被构成为能够执行能够自动驾驶的车辆中的车道变更控制,所述车道变更控制是用于车道变更的驾驶控制并且至少包括自动转向操纵控制,其中,所述控制装置具备:
2.根据权利要求1所述的控制装置,其中,
3.根据权利要求1或2所述的控制装置,其中,
4.根据权利要求1或2所述的控制装置,其中,
5.根据权利要求1至4中任一项所述的控制装置,其中,
6.根据权利要求1至5中任一项所述的控制装置,其中,
7.一种控制装置(18),被构成为能够执行能够自动驾驶的车辆中的超车控制,所述超车控制是用于超车的驾驶控制并且至少包括自动转向操纵控制,其中,所述控制装置具备:
8.一种控制装置,是被构成为能够自动驾驶且能够执行超车控制的车辆的控制装置(27),所述超车控制是用于超车的驾驶控制并且至少包括自动转向操纵控制,其中,所述控制装置具备:
9.根据权利要求7或8所述的控制装置,其中,
10.根据权利要求7至9中任一项所述的控制装置,其中,
技术总结
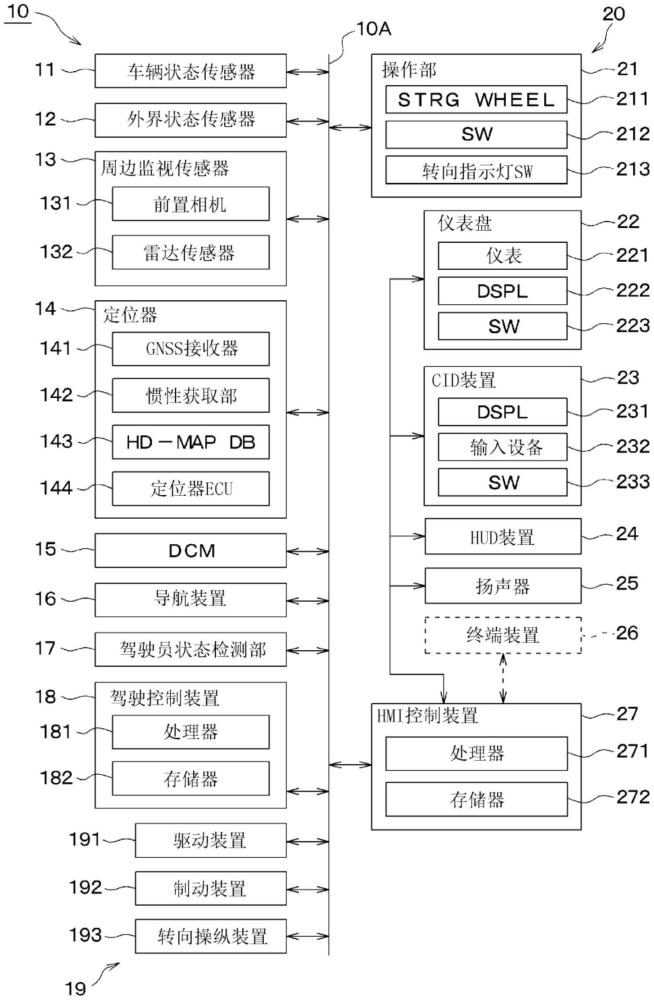
控制装置(18)被构成为能够执行能够自动驾驶的车辆中的车道变更控制,该车道变更控制是用于车道变更的驾驶控制并且至少包括自动转向操纵控制,其中,控制装置具备:处理器(181);以及作为非过渡性有形存储介质的存储器(182),存储由该处理器使用的数据以及程序命令。处理器被构成为:通过执行存储于存储器的程序命令,来在距驾驶自动化等级变化的转移区域在规定距离以内或规定时间以内的第一情况下,或者在车道变更目的地区域存在合流地点或弯道地点的第二情况下,即使在没有周边监视义务的自动驾驶中驾驶员进行车道变更的执行开始指示,也限制车道变更控制。
技术研发人员:久米拓弥,和泉一辉
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!