一种自动紧急避撞的控制方法、装置、存储介质及车辆与流程
本发明属于自动驾驶,具体涉及一种自动紧急避撞的控制方法、装置、存储介质及车辆。
背景技术:
1、随着汽车智能驾驶软硬件能力的提升,汽车智能化程度越来越高,智能辅助驾驶水平越发成熟。在此背景下,对智能驾驶的安全性提出了更高的要求,其中避撞功能基本上已成为智能驾驶辅助不可或缺的一项重要安全功能。该功能能够辅助或代替驾驶员在紧急情况下使得车辆紧急避撞,最大程度上减小事故风险,保障生命财产安全。
2、专利号为cnio8189835a的中国专利,其公开了一种自动驾驶的避撞控制方法及系统,该发明提供了一种自动驾驶的避撞控制方法,针对不同工况进行统筹规划,通过对碰撞时间、相对速度、相对距离、制动减速度等因素,综合判断分析不同避撞行为的触发条件,给出不同工况下的基于车辆自身状态给出最优的避撞行为方式。该避撞策略可以适用于自动驾驶汽车车速在及以下的工况,既能兼顾车辆行车效率又能兼顾安全性。但该
技术实现要素:
未涉及采取制动情况下,后车来不及反应,追尾本车的情况,在极限工况中具有一定局限性。
技术实现思路
1、本发明的目的是:旨在提供一种自动紧急避撞的控制方法、装置、存储介质及车辆,能够通过判断本车与前车的碰撞风险、本车减速后被后车追尾的情况以及相邻车道是否存在抑制变道目标,采取相应的紧急避撞措施,提高极限工况下的行驶安全性,最大程度减小对生命财产安全威胁。
2、为实现上述技术目的,本发明采用的技术方案如下:
3、第一方面,本技术公开了一种自动紧急避撞的控制方法,所述方法包括,
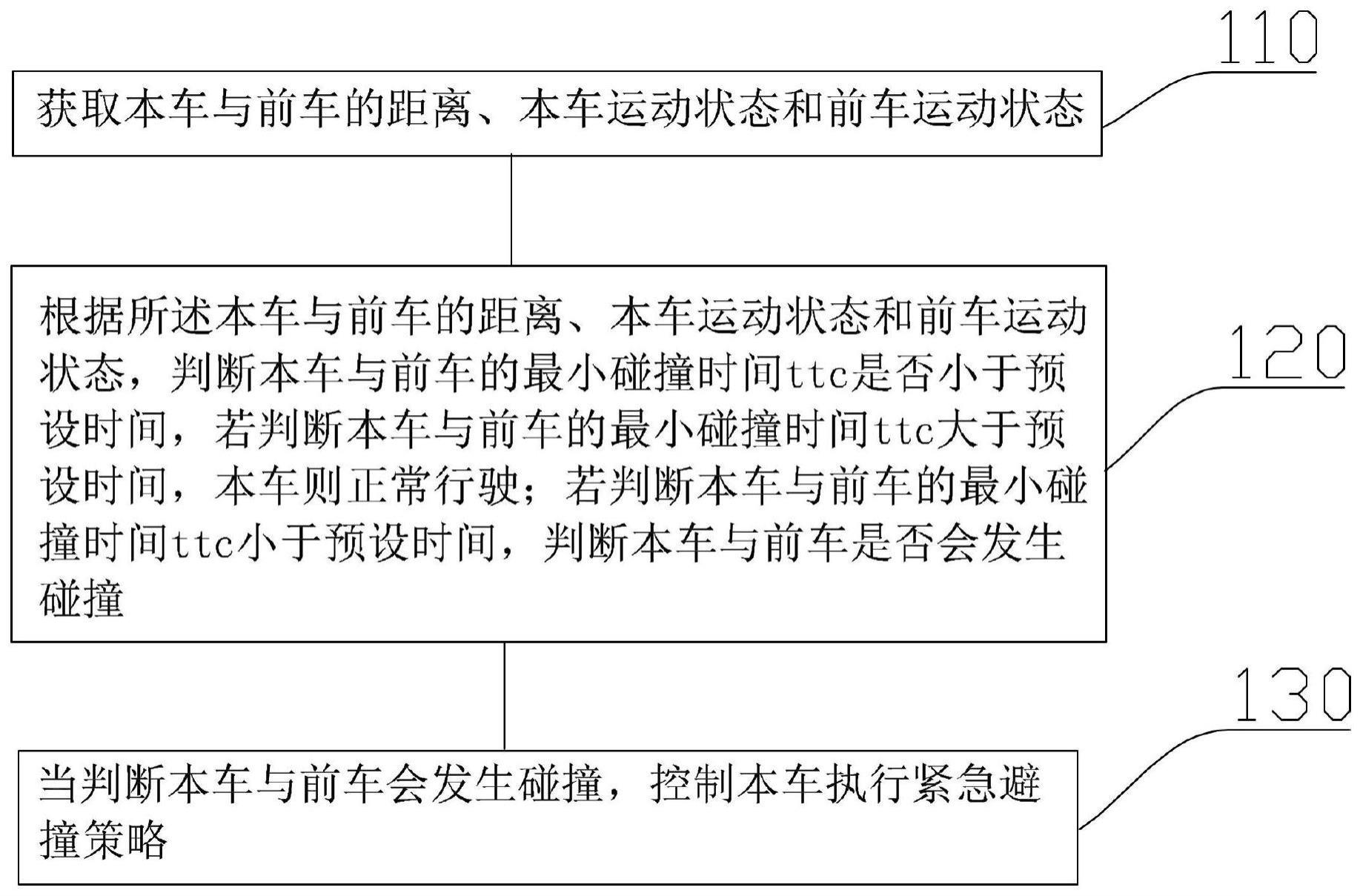
4、获取本车与前车的距离、本车运动状态和前车运动状态;
5、根据所述本车与前车的距离、本车运动状态和前车运动状态,判断本车与前车的最小碰撞时间ttc是否小于预设时间,若判断所述本车与前车的最小碰撞时间ttc大于预设时间,本车则正常行驶;若判断所述本车与前车的最小碰撞时间ttc小于预设时间,判断本车与前车是否会发生碰撞;
6、当判断所述本车与前车会发生碰撞,控制本车执行紧急避撞策略。
7、结合第一方面,在一些可选的实施方式中,所述方法还包括,
8、在获取所述本车与前车的距离时,判断本车与前车的距离是否大于预设距离;
9、若所述本车与前车的距离大于预设距离,本车正常行驶;若所述本车与前车的距离小于预设距离,触发紧急避撞策略,并获取所述本车运动状态与前车运动状态。
10、结合第一方面,在一些可选的实施方式中,所述方法还包括,
11、在获取所述本车运动状态和前车运动状态时,获取本车当前速度、加速度、系统加速度响应时间、本车与前车距离、前车当前速度和加速度;
12、根据所述本车当前速度、加速度、系统加速度响应时间、本车与前车距离与前车当前速度和加速度,判断本车和前车的最小碰撞时间ttc是否小于预设时间,其中,预设时间t≤3s;
13、若判断所述本车与前车的最小碰撞时间ttc小于3s,判断本车与前车是否会发生碰撞;若判断所述本车与前车的最小碰撞时间ttc大于3s,本车正常行驶。
14、结合第一方面,在一些可选的实施方式中,所述方法还包括,
15、当判断所述本车与前车的最小碰撞时间ttc小于预设时间,且判断本车与前车会发生碰撞时,控制本车执行第一紧急避撞策略;当判断本车与前车不会发生碰撞时,控制本车执行第二紧急避撞策略。
16、结合第一方面,在一些可选的实施方式中,所述方法还包括,
17、当控制本车执行所述第一紧急避撞策略时,通过感知系统判断相邻车道是否存在抑制变道的目标;
18、当所述相邻车道存在抑制变道的目标时,本车进行减速操作,并通过启动提醒功能提醒驾驶员、乘客和后车;
19、当所述相邻车道不存在抑制变道的目标时,感知系统规划变道路径,并发出即将紧急变道语音警告,同时,开启相应方向转向灯,提醒后车,本车执行变道动作。
20、结合第一方面,在一些可选的实施方式中,所述方法还包括,
21、当控制本车执行所述第二紧急避撞策略时,本车进行减速操作,并通过感知系统获取本车与后车的相对速度和距离,判断后车是否会追尾本车;
22、当判断所述后车会追尾本车时,感知系统判断相邻车道是否否存在抑制变道的目标;
23、若所述相邻车道存在抑制变道的目标时,通过启动提醒功能提醒驾驶员、乘客和后车;
24、若所述相邻车道不存在抑制变道的目标时,感知系统规划变道路径,并发出即将紧急变道语音警告,同时,开启相应方向转向灯,提醒后车,本车执行变道动作;
25、当判断所述后车不会追尾本车时,本车减速操作后,正常行驶。
26、第二方面,本技术还公开了一种自动紧急避撞的控制装置,所述控制装置包括,
27、获取模块,用于获取本车与前车的距离、本车运动状态和前车运动状态;
28、判断模块,用于根据所述本车与前车的距离、本车运动状态和前车运动状态,判断本车与前车的最小碰撞时间ttc是否小于预设时间,并根据本车与前车的最小碰撞时间ttc与预设时间的大小判断本车与前车是否会发生碰撞;
29、执行模块,用于根据本车与前车是否会发生碰撞的情况,控制本车是否执行紧急避撞策略。
30、结合第二方面,在一些可选的实施方式中,所述执行模块还用于,
31、当判断模块判断本车与前车会发生碰撞时,控制本车通过感知系统判断相邻车道是否存在抑制变道的目标;
32、当相邻车道存在抑制变道的目标时,本车进行减速操作,并通过启动提醒功能提醒驾驶员、乘客和后车;当相邻车道不存在抑制变道的目标时,感知系统规划变道路径,并发出即将紧急变道语音警告,同时,开启相应方向转向灯,提醒后车,本车执行变道动作。
33、结合第二方面,在一些可选的实施方式中,所述执行模块还用于,
34、当判断模块判断本车与前车不会发生碰撞时,控制本车执行进行减速操作,并通过感知系统获取本车与后车的相对速度和距离,判断后车是否会追尾本车;
35、当判断后车会追尾本车时,感知系统判断相邻车道是否否存在抑制变道的目标;
36、若当相邻车道存在抑制变道的目标时,通过启动提醒功能提醒驾驶员、乘客和后车;
37、若相邻车道不存在抑制变道的目标时,感知系统规划变道路径,并发出即将紧急变道语音警告,同时,开启相应方向转向灯,提醒后车,本车执行变道动作;
38、当判断后车不会追尾本车时,本车减速操作后,正常行驶。
39、第三方面,本技术还公开了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行如上述所述的方法。
40、第四方面,本技术还公开了一种车辆,所述车辆包括存储器和处理器,其中:
41、所述存储器用于存放计算机程序;
42、所述处理器用于所述执行存储器上所存放的计算机程序时,实现权利要求1-6任一项所述的方法。
43、采用上述技术方案的发明,具有如下优点:
44、通过获取的本车与前车的距离、本车运动状态和前车运动状态,能够判断本车是否会与前车发生碰撞,当可能与前车碰撞时,通过采取第一紧急避撞策略,能够避免或减轻与前车的碰撞情况,当可能与后车追尾时,通过采取第二紧急避撞策略,能够避免或减轻与后车的碰撞情况,从而提高极限工况下的行驶安全性,最大程度减小对生命财产安全威胁。
- 还没有人留言评论。精彩留言会获得点赞!