在周围环境内自动化地驾驶机动车的方法和机动车与流程
本发明涉及自驾驶机动车的领域,并且涉及一种用于在周围环境内自动化地使机动车运动的方法和一种相应的机动车。
背景技术:
1、对于机动车中依赖于对周围环境的感知的系统,例如存在于自驾驶机动车中的系统,公开可用的规范iso/pas 21448和相关的最终草案iso/fdis21448包含用于求取如下预期功能或者性能限制的指导方针:所述预期功能或者性能限制可能导致这样的系统的潜在危险行为。不存在因系统的潜在危险行为而产生的不适当的风险,被限定为预期功能安全(safety of the intended functionality,sotif)。这样的系统的状况知觉(situationsbewusstsein)基于复杂的传感器和处理算法(包括人工智能和机器学习在内),所述复杂的传感器和处理算法可能无法随时正确地检测所有状况。sotif特别强调在应力条件、即在如下“触发条件”下的感知限制:所述触发条件可能导致假阴性、假阳性或者有错误的对象特性(例如位置错误、错误的速度等)。一般性目标是,通过识别如下状况来显著地改善用于这样的系统的安全概念或者稳健性并适当地缓解这些状况:在所述状况中存在触发条件并且因此存在性能限制。
2、由现有技术已知用于在特定的周围环境内控制车辆的方法。因此,在专利申请de10 2019 208 744 a1中描述一种对所监控的周围环境内的多个车辆的外部控制。专利申请de 11 2016 004 751 t5公开一种自主的驾驶辅助系统,该驾驶辅助系统沿着所规划的驾驶路线检测相关的信息。在专利申请de 10 2016 102 065 a1中描述一种用于辅助机动车在停车场中的自主驾驶的方法,该方法使用基础设施地图。所有这些系统都处理非常特殊的问题,在这些情况中都未提出一种能够普遍应用的方法,该方法确保车辆在特定周围环境中的稳健性和运行安全性。
技术实现思路
1、根据本发明,提出一种根据本发明的用于在该周围环境内自动化地驾驶机动车的方法,其中,该机动车包含具有驾驶模型的控制单元用于在使用该驾驶模型的情况下自动化地驾驶。另外的有利构型能够通过在优选实施方式中所列举的措施实现。
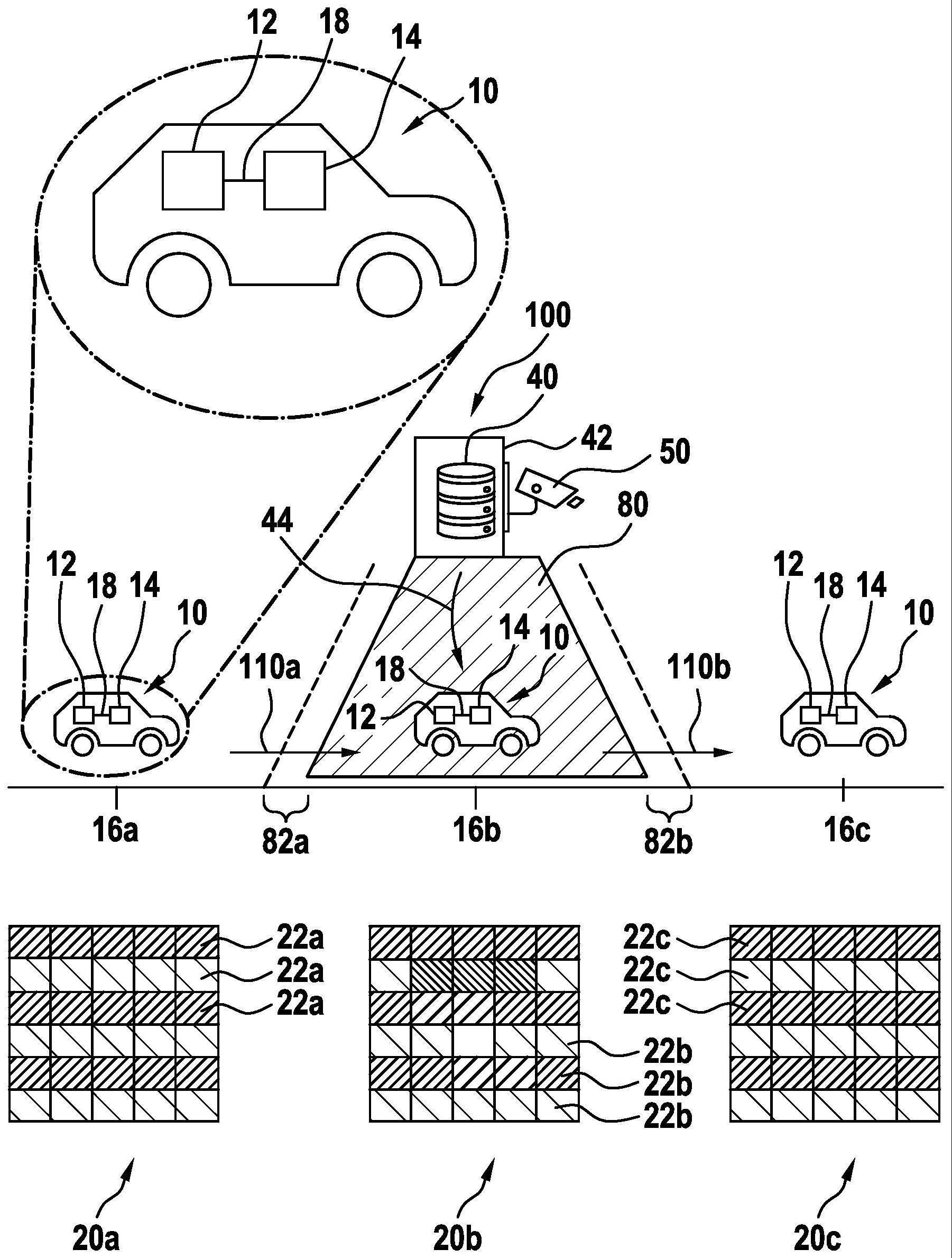
2、在此,根据本发明的方法包括下述步骤:为控制单元的驾驶模型提供配属于该周围环境的驾驶参数;在事先地或者同时地或者事后地基于所述驾驶参数匹配该驾驶模型的情况下,该机动车进入到该周围环境中;在使用该经匹配的驾驶模型的情况下在该周围环境内自动化地驾驶该机动车。
3、控制单元在此是具有计算单元的系统,该系统具有对机动车的传感器和执行器(例如马达控制装置、转向装置、制动系统)的访问。控制单元因此能够分析处理传感器信号并且在此基础上控制连接的执行器,以便例如将机动车转向、加速或者制动。被该控制单元使用的驾驶模型是被该控制单元使用的算法(例如通过软件和/或电路来实现),该算法负责处理传感器信号并且在此基础上控制执行器,必要时在考虑人类驾驶员的输入的情况下。
4、因此根据本发明提出,基于参数组(驾驶参数)针对特定的周围环境来匹配用于自动化驾驶的机动车的驾驶模型。“进入到该周围环境中”例如可以通过外部的或者车辆自身的传感器、如光栅、感应线圈、摄像机、基于rfid的系统(rfid:radio-frequencyidentification,射频识别,用于自动化且无接触地辨识和定位对象的技术)来探测和/或基于机动车的导航系统的数据来判定。在本发明的意义上的“进入到该周围环境中”意味着驶越该周围环境的边缘,其结果是,该机动车随后处于该周围环境内,其中,如果车辆的一半以上(相对于该车辆的长度)处于周围环境中,则视为该机动车在该周围环境内。可考虑,在靠近周围环境时就已经提供针对周围环境的驾驶参数使用。这样的靠近也能够通过传感器来探测和/或借助机动车的导航系统来判定。
5、机动车在该周围环境内在匹配该驾驶模型之后自动化地借助于其驾驶模型已经匹配的控制单元来驾驶。自动化的驾驶在此应理解为具有根据标准sae j3016的至少级别1的自动化程度的驾驶。本发明在更高的自动化程度、尤其是级别4(高度自动化)和级别5(全自动化)的情况下是特别有利的,其中,也可考虑级别1、2和3。因此,控制单元可以设置为用于仅辅助人类驾驶员(级别1),但也可以是完全独立地驾驶车辆的控制单元(级别5)。
6、“基于所述驾驶参数匹配驾驶模型”在此意味着,在考虑通过驾驶参数提供使用的信息的情况下设定驾驶模型。在最简单的情况下,简单地通过新的值、即驾驶参数来替换驾驶模型的特定参数。
7、一般地,驾驶参数可以包括例如用于驾驶运行的基础参数(例如最大的速度或者加速度)和/或可以包含用于分析处理机动车的传感器(车辆传感器)的传感器信号的一般参数,但也可以描述例如机动车的传感器信号相对于彼此的权重和/或相对于标准驾驶模型(一般驾驶模型,该一般驾驶模型尤其在其中使用专用的驾驶参数的周围环境之外符合标准)的权重。因此根据本发明,针对周围环境,对车辆的传感器的传感器信号的分析处理和考虑被重新加权。这样的权重在此不必涉及由传感器直接提供的电信号,而是也可以涉及在电学上和/或借助软件被再处理的传感器信号。通过驾驶参数也可以以不同的方式对机动车的一个或者多个传感器的视场(“field of view”,fov)的特定部分区域进行加权并且这样优化驾驶模型。如果例如借助栅格将视场划分为单个的栅格单元作为这样的部分区域,则每个栅格单元可以配属有传感器信号的不同权重。也可考虑,驾驶参数包含如下指示:停用特定的传感器和/或忽略所述特定的传感器的信号,必要时也可以仅涉及机动车的视场(即关于机动车的所有传感器的总体的视场)的一些部分。这样的停用具体地也可以借助以值零对相应的传感器信号加权来实现。驾驶参数也可以包含值域,例如包含最大速度和最小速度或者也在传感器信号的情况下包含如下信号强度:应在所述信号强度内对信号进行分析处理。驾驶参数也可以考虑传感器的专用特性,即除了准确的类型之外还可以考虑特性、如准确的传感器模型、位置和定向。
8、在本发明意义上的传感器信号的权重意味着相对于机动车的传感器的其他传感器信号的权重(即传感器信号的相对于彼此的权重)和/或意味着相对于特定的预给定的值、例如相对于标准值的权重,该标准值可以是例如通过在机动车的标准驾驶模型中的信号分析处理预给定的。权重不必涉及由传感器提供的信号,而是也可以涉及经再处理的数据。也可以通过驾驶模型对机动车的一个或多个传感器的视场的特定部分区域进行加权,并且因此针对周围环境优化本地驾驶模型。驾驶模型还可以考虑相关的参数或者参量的值域,例如考虑最大速度和最小速度或者在传感器信号的情况下还考虑信号强度,应在所述信号强度内分析处理信号。
9、总而言之,因此也能够针对特殊的周围环境减少机动车的易出错性。因此减少事故的数量。此外,能够减少标准驾驶模型的开发时间,因为不必考虑特殊情况(即,在机动车的运行时间内仅罕见地出现的周围环境)。
10、然而,驾驶参数不必直接将用于驾驶模型的技术设定指示、如传感器信号的权重编码,而是也可以基于所述驾驶参数来计算和/或从本地数据库如查找表中调用驾驶模型的针对特定的周围环境的实际、具体的设定。例如在所提供的驾驶参数虽然提供关于该周围环境的一般信息,但这些信息还必须被转换到驾驶模型的针对对应的机动车和该驾驶模型所相应优化的具体配置中时,可以是这种情况。驾驶参数可以例如以更为抽象的、必要时标准化的形式提供关于该周围环境的信息,向驾驶模型的具体设定的转化则也可以在机动车中的计算单元中、例如控制单元中才发生。在此例如可以考虑安装在车辆中的具体传感器类型。也可考虑将由具体技术设定指示和抽象信息组成的混合体作为用于驾驶模型的驾驶参数。反之也可以实现,针对周围环境提供用于不同车辆类型、传感器类型等的不同驾驶参数,然后基于具体的机动车来选择正确的驾驶参数。
11、也可以在考虑期望的安全要求等级(例如相应的asil,automotive safetyintegrity level,汽车安全完整性等级)的情况下对驾驶模型进行匹配。该安全要求等级可以是驾驶参数的一部分,但也可以以其他方式预给定,例如由驾驶员预给定。在匹配驾驶模型时通常可以在驾驶参数之外还考虑另外的信息和数据(例如来自该机动车的导航系统)。
12、根据本发明已看出,许多机动车仅在受限的时间内在特定的周围环境中停留。例如,机动车仅在极小部分时间内在停车楼中运行。这导致了驾驶模型、即负责控制自动化的机动车的算法典型地不被针对这样的特殊情况优化,并且部分地也不适用于这样的特殊情况。为了能够普遍应用,驾驶模型在其参数和特性方面必须这样进行选择,使得该驾驶模型能够可靠地应用于任意每个周围环境或者至少尽可能多的不同周围环境。驾驶模型被针对周围环境和条件来设计,这些周围环境和条件被称为该驾驶模型的“运行设计域”(odd)。若驾驶模型在其odd之外运行,则可能导致错误并且在最糟的情况下导致事故。
13、在本发明意义上的周围环境应理解为地球表面的经限定的、在地理上任意限界的部分地域。即,这例如可以是国家、城市、道路、十字路口、停车场、工厂用地(包含或者不包含处于该工厂用地上的建筑物的存在于该工厂用地上的内部空间)、建筑物例如停车楼、仓库和制造车间等的内部空间。特定的抽象几何形状如圆、矩形或者多边形也可以限定周围环境。因此,例如围绕地球表面的一个限定点的具有1km半径的圆同样可以限定周围环境。
14、在其中能够特别有利地使用本发明的周围环境是处于自动化驾驶的机动车的标准驾驶模型的odd之外的周围环境。可能的例如是,这样的机动车仅在0.0001%的运行时间内位于停车楼中。可预期的是,所使用的用于控制机动车的标准驾驶模型因此典型地不被针对在那里出现的条件优化,因此在这样的周围环境中的驾驶可能是易出错的并且该使用可能导致事故。
15、本发明的优点因此在于,能够针对任意的、必要时非常特殊的周围环境提供驾驶参数,并且能够在此基础上匹配机动车的控制单元的驾驶模型。在此,不同的周围环境可以具有相同的或者不同的驾驶参数。这些驾驶参数有利地针对所配属的周围环境被优化。通过该优化减少机动车的标准驾驶模型的易出错性,因为不必在开发该标准驾驶模型时考虑所有特殊情况。用于标准驾驶模型的驾驶参数可以针对典型的场景和周围环境被优化。然后针对特殊的周围环境来匹配该模型的驾驶参数。
16、在设计驾驶参数时可能被考虑的周围环境特点例如是平均的或者当前的交通密度、道路宽度、照明条件、路面、平均的或者当前的气候状况,并且尤其还可以是直接地影响传感器的和/或触发传感器的周围环境特性如反射表面和/或潜在的干扰光源。针对这些要点尤其还应参考公开可用的规范iso/pas 21448,并且特别是参考那里的章节7.3.2和7.3.3,或者替代地参考相应的最终草案iso/fdis 21448。
17、因此,根据本发明的方法使得能够实现针对特殊的周围环境优化机动车的控制单元的驾驶模型,从而该驾驶模型比未经匹配的而是替代地尝试针对所有可考虑到的状况做准备的驾驶模型明显更不易出错。同时,因此不必在车辆开发时考虑每个特殊的周围环境,而是可以事后在需要时、例如直接在现场提供专用的驾驶参数。
18、在本发明的范畴内使用的驾驶模型例如可以使用由数据组(例如呈矩阵的形式)推导出(并且在一种特殊情况中相当于该数据组)的驾驶参数,该数据组反映关于机动车的传感器在特定条件下在预确定的与sotif相关的属性(例如传感器的假阴性率或者真阳性率)方面的性能的信息,所述特定事实例如是周围环境中的气候状况和周围环境的特殊的边界条件(例如交通密度、道路宽度、行驶道路路面)。通过条件概率所表述的在周围环境事实与sotif相关的属性之间的相应的相关性可以针对每个传感器通过pgm(probabilistisches graphisches modell,概率图形模型)、优选通过贝叶斯网络来描述。关于感兴趣的与sotif相关的属性的边界概率则可以形成驾驶参数的可能的数据组。在这种情况下,该数据组为驾驶模型提供关于这些传感器在特定条件下的可靠性的信息。在此基础上,尤其是根据传感器的由数据推导出的可信度(“confidence level”),能够匹配该驾驶模型的分析处理行为,即,能够改变例如传感器信号相对于彼此的权重和/或能够一般性地改变传感器信号的信号融合(“sensor fusion”)。
19、机动车的视场(“field of view”,fov)在此优选划分为栅格单元。对于每个传感器而言可以单独地观察每个栅格单元,并且每个栅格单元可以配属有自己的pgm。在此,必须在贝叶斯网络的结构和参数之间(条件概率)进行区分:在许多情况下,结构对于视场的所有栅格单元而言是相同的,然而其中不必强制如此(例如,部分视场的结构可以不同)。然而参数应针对所有栅格单元单独地确定。借助这样的处理方式针对每个栅格单元获得在被用于该视场的该区域的传感器的可靠性方面的信息。可被用于驾驶模型的驾驶参数的数据组则由针对各个栅格单元的数据组的总集得出。
20、对周围环境特定的(即配属于该周围环境的)驾驶参数的提供可以例如在该机动车的制造期间就已经发生。因此,这些参数例如可以保存在机动车的计算单元的存储器中并且在需要时被调用。替代地也可考虑,在晚些时候才向机动车提供所述参数,例如在存储介质如存储卡上。一种特别有利的变型是,经由无线电连接例如来自云的互联网服务器或者借助边缘计算(edge computing)向机动车传输驾驶参数。
21、以有利的方式,所述周围环境是受控的周围环境,尤其是受控的道路、受控的场地和/或受控的建筑物。受控的周围环境(相当于受控的道路、场地、建筑物)应理解为如下周围环境:在该周围环境中完全地或者至少部分地例如借助传感器和/或其他方法来监控动态事实(交通和对于驾驶安全性相关的运动对象)。举例如:摄像机、光电探测器、雷达、激光雷达(light detection and ranging,光探测和测距)、基于超声波的传感器、压电传感器、气压传感器、温度传感器、基于rfid的系统(rfid:radio-frequency identification,射频识别)、感应线圈、在该周围环境中行驶的车辆的导航系统(包含数据到中央处理单元的传输)和卫星监控。典型地,在受控的周围环境中附加地对周围环境的对于机动车的安全驾驶相关的特性进行监控(例如用于温度测量的温度计),并且必要时主动地进行控制(例如,用于控制温度的加热装置),和/或这些特性通过该受控的周围环境自身被预给定(例如,用于避免雨水和由此导致的行驶道路表面潮湿的顶盖)。与机动车的安全驾驶相关的特性的示例是物理参数、如温度(例如道路或者空气)、空气湿度、风速和亮度但还有雨水的存在。受控的周围环境的示例是具有自动化停车系统(avp,automated valet parking,自动代客泊车)的停车楼和停车场和具有用于辅助自动化驾驶的特殊基础设施的专用道路(例如用于自主驾驶的接驳巴士)。受控的建筑物的另外的示例是仓库,在该仓库中,在那里自主驾驶的机动车的运动被监控。
22、根据本发明方法的另一有利构型,优选在机动车进入到该周围环境中时、即在驶越该周围环境的边缘时基于驾驶参数来匹配驾驶模型。即,若机动车运动到该周围环境中,就在驶越该周围环境的边缘时通过驾驶参数来匹配驾驶模型。同样可考虑,该匹配在到达该周围环境的边缘之前就已经发生或者在驶越边缘之后、即在该周围环境内才发生。换言之,在这样的情况中,在机动车与周围环境低于事先规定的在空间上的和/或在时间上的距离时匹配该驾驶参数。空间距离在此可以是从机动车的一个点(例如机动车的中心)到该周围环境的边缘(即到该周围环境的边缘的最接近的位置)的地理距离(即直线距离),但该空间距离替代地例如也可以通过到该周围环境的边缘的、能够通过该机动车驾驶的最短路程给出,和/或可以通过该机动车的导航系统所建议的至该周围环境的边缘的路程给出,和/或通过所规划的到该周围环境的边缘的路程(在机动车朝向该周围环境运动的情况下)或者从该周围环境的边缘起的被驶过的路程(在机动车已经处于周围环境中的情况下)给出。相应的内容适用于时间距离:这样的时间距离例如可以简单地由机动车的当前的速度和与该周围环境的边缘的地理距离计算,或者也可以根据由导航系统为该机动车所预测的驾驶持续时间(在机动车朝向该周围环境运动的情况下)或者自驶越该边缘起已过去的时间(在机动车处于该周围环境中的情况下)计算。
23、与在到达或者至少靠近该该周围环境时匹配驾驶模型相反,当然同样可以在离开该周围环境或者远离该周围环境时将基于所述驾驶参数匹配的驾驶模型继续带入其他的状态中。例如可以又取消所进行的匹配,或者可以基于其他驾驶参数重新匹配驾驶模型。后者例如可以是这种情况:例如在机动车从一个周围环境进入到配属有所述其他驾驶参数的另一周围环境中。对于取消该匹配或者重新匹配,存在如上文中所述的那样的针对靠近该周围环境所说明的相同可能性同样可供使用(其中,当然必须将该周围环境和角色该周围环境之外的区域的角色互换)。
24、为了将未将优化驾驶模型用于该周围环境的时间保持得尽可能少,优选在机动车进入到该周围环境中之前的或者之后的优选≤1分钟、优选≤30秒、特别优选≤10秒和极特别优选≤1秒的时间段中基于所述驾驶参数来匹配该驾驶模型。
25、此外有利的可以是,在匹配该驾驶模型期间,机动车不主动地运动,即,例如机动车的一个或多个马达是关闭的。由此能够确保对驾驶模型的匹配不导致控制单元的意外的行动、如在驾驶期间的突然的转向运动或者加速。有利地,这样的机动车停车不是仅仅由于所规划的驾驶模型匹配而执行,而是能够出于其他原因充分利用机动车停车。例如在该周围环境的边缘附近,车辆可能由于被设定为红灯的信号灯而导致停车,然后能够充分利用这种被迫的停车,以便将驾驶模型匹配于该周围环境。
26、特别有利的还有,在进入到该周围环境中时或者在进入到该周围环境中之前,自动化地检查是否存在配属于该周围环境的适用于该机动车的驾驶模型的驾驶参数。这样的检验可以通过访问其中保存有针对该周围环境的驾驶参数的相应存储器进行,例如控制单元的存储器中的相应的本地数据库,和/或通过机动车借助移动无线电连接与其连接的数据库服务器进行,并且该数据库服务器例如可以是在该周围环境内的或者在周围环境附近的基础设施的一部分。“在周围环境附近”在此意味着优选是≤500m、特别优选是≤100m、极特别优选是≤10m的距离(与该周围环境的边缘的最接近的部位的直线距离)。这样的检验可以例如如此及时地进行,使得在进入到该周围环境中之前可以从数据库服务器加载驾驶参数。通过这样自动化的检验能够确保机动车的驾驶员不必手动地进行这样的检验,并且能够借助驾驶参数及时地在期望的时间点、直到到达周围环境为止对驾驶模型进行匹配。
27、一般有利的是,该机动车包括用于无线的数据接收的通信接口,并且无线地、例如通过可经由因特网到达的数据库服务器提供驾驶参数,并且所述驾驶参数通过该通信接口无线地被接收并且随后被转发给控制单元。因此可以实现,机动车借助于通信接口建立例如到数据库服务器的无线连接,并且从那里将针对特定的周围环境的驾驶参数的当前版本下载到车辆的、例如控制单元的存储器上。由此能够确保该车辆具有适用于该周围环境的驾驶参数,即使这些驾驶参数例如在制造该车辆的时间点尚未供使用。
28、由此出发的一种特别有利的变型是,周围环境配属有数据传输单元(用于传输数据的计算单元),并且通过该数据传输单元无线地提供驾驶参数,该数据传输单元例如与其上存储有这些驾驶参数的服务器连接。这样的数据传输单元优选处于该周围环境中或者至少在该周围环境附近(优选距离≤500m、特别优选距离≤100m、极特别优选距离≤10m)。在这样的情况中,数据的传输也不必经由长距离移动无线电技术(“蜂窝式v2x(cellularv2x)”)进行,而是还可以呈专用近程通信(dscr,dedicated short range communication)的形式借助wlan的技术、例如pwlan(ieee 802.11p)的基础上进行。例如可设想,该周围环境是avp适用的停车楼,而在驶入该停车楼时借助pwlan或者类似的标准传输相关的驾驶参数。借助车辆到基础设施通信(v2i communication,vehicle-to-infrastructurecommunication)与车辆连接的基础设施通常对于本发明而言是特别有利的,因为这使得能够实现,当前对于该周围环境相关的驾驶参数能够被转发给在附近的车辆。传感器、例如摄像机也可以属于这样的基础设施,所述传感器能够辨识车辆,因此有针对性地向这些车辆发送所需要的驾驶参数。其优点在于,车辆本身或其计算单元不需要知晓该周围环境的存在或者位置和几何形状;仅当要匹配驾驶模型时才通知该车辆并且直接向该车辆提供相应的信息。
29、特别有利的是,用于控制单元的驾驶参数包括关于对机动车的传感器的信号的分析处理、尤其是关于加权的信息。在此,权重意味着要么是相对于其他传感器信号的权重要么是相对于其他的值、例如相对于标准值的权重,该标准值可以是例如通过在机动车的标准驾驶模型中的信号分析处理预给定的。权重不必涉及由传感器提供的信号,而是也可以涉及经再处理的数据。也可以通过驾驶参数对机动车的一个或多个传感器的视场的特定部分区域进行加权,并且因此优化驾驶模型。
30、相应于根据本发明的另一方面,提出一种用于根据在上文中所描述的方法中的任一方法中使用的机动车,其中,该机动车包含用于在使用驾驶模型的情况下自动化地驾驶该机动车的控制单元,该控制单元设置为基于针对该周围环境所提供的驾驶参数匹配于该周围环境。该控制单元在此是具有计算单元的系统,该系统具有对机动车的传感器和执行器的访问,其中,该控制单元可以包含存储器,在该存储器中可以存储驾驶参数。这样的机动车以有利的方式包含用于无线的数据接收的通信接口(接收模块),该通信接口与控制单元连接并且设置为用于无线地接收并向控制单元转发所述驾驶参数。在那里,驾驶参数例如可以被保存在控制单元的存储器中直至用于使用,或者可以直接被利用以便匹配驾驶模型。
31、本发明提供多种多样的优点。因此,通过为自动化的机动车的驾驶模型提供特定于周围环境的驾驶参数能够实现使得驾驶模型也能够以优化的方式匹配于特殊的周围环境、尤其是受控的周围环境,而这些周围环境无需在该车辆的原始开发期间就已经被考虑。此外,如果周围环境提供适合的基础设施,则车辆也不依赖于自己的传感器和/或自己的导航系统的数据等以完全辨识特殊的周围环境类型并适当地匹配车辆行为。如果机动车例如驶入到停车楼中,则车辆例如可以通过该停车楼的基础设施(例如借助摄像机)被辨识,然后直接通过无线电连接向该机动车传输最佳适合的驾驶参数,而该车辆的系统完全不需要将该停车楼辨识为停车楼。
32、总而言之,通过本发明明显提高用于自动化驾驶的驾驶模型的安全性和稳健性。所述安全性和稳健性能够有针对性地再一次通过下述方式提高:针对高于平均水平地对于安全性关键的周围环境预给定驾驶参数,这些驾驶参数导致该驾驶模型在此特别谨慎地行动。此外,通过在经优化的驾驶模型的情况下匹配于该周围环境地对传感器数据的分析处理,此外能够减少所需要的计算的复杂性,并且因此减少用于所述计算的分析处理的时间开销和资源开销。
33、此外,本发明还使得能够实现,对在通过特定周围环境行驶时在该行驶路程上的较慢的行驶速度基于在那里的待使用的驾驶参数(例如受限于传感器限制)进行预测。相应地,可以在考虑所述较慢的驾驶速度的情况下优化该车辆的行驶路程。
- 还没有人留言评论。精彩留言会获得点赞!