移动体控制装置、移动体控制方法及存储介质与流程
本发明涉及移动体控制装置、移动体控制方法及存储介质。
背景技术:
1、以往已知如下技术:在基于来自相机等外界传感器的识别信息来计划车辆的目标轨道的车辆控制装置中,在从外界传感器识别到车辆的周围的对象物的情况下,计划将外界传感器的实际检知范围扩宽的目标轨道(例如,日本特开2021-100827号公报)。
技术实现思路
1、可是,一般情况下相机的分辨率越高则识别性能越好,但数据量多,因此图像处理承受负荷,处理时间变长。另外,相反地在为了缩短处理时间而降低了分辨率的情况下有可能误识别物体,但在以往技术中,关于针对被误识别的可能性高的物体的处理未作考虑。因此,有时不能生成与移动体的周边状况相应的目标轨道,不能进行恰当的驾驶控制。
2、本发明的方案是考虑这样的情况而完成的,其目的之一在于提供能够执行更恰当的移动体控制的移动体控制装置、移动体控制方法及存储介质。
3、本发明的移动体控制装置、移动体控制方法及存储介质采用了以下的结构。
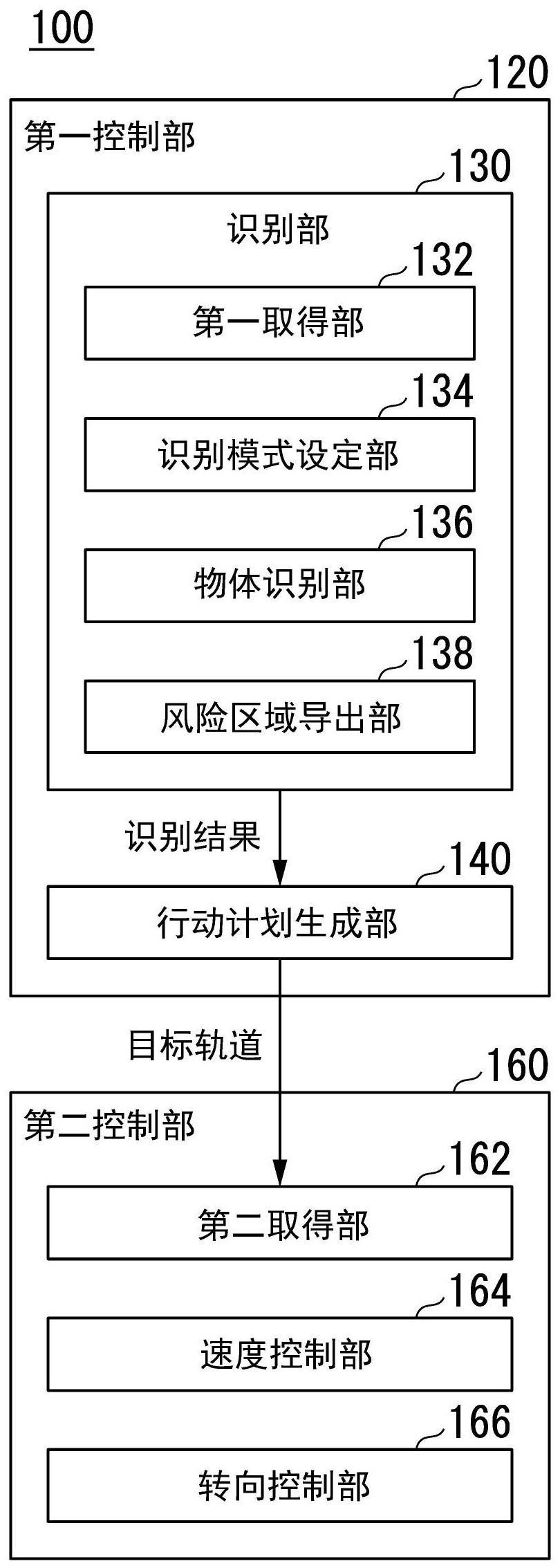
4、(1):本发明的一方案的移动体控制装置具备:识别部,其基于由摄像部拍摄到的第一图像来识别移动体的周边状况;行动计划生成部,其基于由所述识别部识别的识别结果来生成所述移动体的将来的行动计划;以及驾驶控制部,其基于由所述行动计划生成部生成的行动计划,来控制所述移动体的转向及速度中的至少一方,所述识别部以使用减少了所述第一图像的数据量的第二图像进行识别的第一识别模式来识别所述移动体的周边的物体,在所识别到的物体的准确度小于阈值的情况下,设为识别到了风险区域比所识别到的物体的风险区域大的其他物体。
5、(2):在上述(1)的方案中,所述识别部在通过所述第一识别模式识别到的所述物体的准确度小于阈值的情况下,从所述第一图像中提取包含所述物体的第一局部图像区域,并针对所提取到的第一局部图像区域,以使用数据量比所述第二图像的数据量多的第三图像进行识别的第二识别模式来识别所述物体,所述行动计划生成部在通过所述第一识别模式识别到的物体与通过所述第二识别模式识别到的物体不同的情况下,基于通过所述第二识别模式识别到的物体的信息来生成所述行动计划。
6、(3):在上述(1)的方案中,所述数据量包括分辨率和帧率中的至少一方。
7、(4):在上述(1)的方案中,由所述识别部识别的识别结果至少包括所述物体的位置、尺寸及种类。
8、(5):在上述(1)的方案中,所述识别部在通过所述第一识别模式识别到的物体中包含其他移动体、以及将移动体移动的区域划分的划分线的情况下,从所述第一图像中提取包含所述划分线的第二局部图像区域,并针对所提取到的第二局部图像区域,以使用数据量比所述第二图像的数据量多的第三图像进行识别的第二识别模式来识别所述划分线,基于所识别到的划分线与所述其他移动体之间的位置关系来识别所述其他移动体的位置。
9、(6):在上述(5)的方案中,所述识别部基于使划分所述移动体移动的区域的划分线延伸而得到的假想线与存在于距所述其他移动体规定距离以内的划分线之间的位置关系,来识别所述其他移动体的位置。
10、(7):在上述(1)的方案中,所述风险区域大的其他物体是预测为规定时间中的移动量比从所述第二图像中识别到的物体的所述规定时间中的移动量大的物体。
11、(8):本发明的一方案的移动体控制方法使计算机进行如下处理:基于由摄像部拍摄到的第一图像来识别移动体的周边状况;基于识别结果来生成所述移动体的将来的行动计划;基于所生成的行动计划,来控制所述移动体的转向及速度中的至少一方;以使用减少了所述第一图像的数据量的第二图像进行识别的第一识别模式来识别所述移动体的周边的物体;在所识别到的所述物体的准确度小于阈值的情况下,设为识别到了风险区域比所识别到的物体的风险区域大的其他物体。
12、(9):本发明的一方案的存储介质存储有程序,其中,所述程序使计算机进行如下处理:基于由摄像部拍摄到的第一图像来识别移动体的周边状况;基于识别结果来生成所述移动体的将来的行动计划;基于所生成的行动计划,来控制所述移动体的转向及速度中的至少一方;以使用减少了所述第一图像的数据量的第二图像进行识别的第一识别模式来识别所述移动体的周边的物体;在所识别到的所述物体的准确度小于阈值的情况下,设为识别到了风险区域比所识别到的物体的风险区域大的其他物体。
13、根据上述(1)~(9)的方案,能够进行更恰当的移动体控制。
技术特征:
1.一种移动体控制装置,其中,
2.根据权利要求1所述的移动体控制装置,其中,
3.根据权利要求1所述的移动体控制装置,其中,
4.根据权利要求1所述的移动体控制装置,其中,
5.根据权利要求1所述的移动体控制装置,其中,
6.根据权利要求5所述的移动体控制装置,其中,
7.根据权利要求1所述的移动体控制装置,其中,
8.一种移动体控制方法,其中,
9.一种存储介质,其存储有程序,其中,
技术总结
本发明提供能够执行更恰当的移动体控制的移动体控制装置、移动体控制方法及存储介质。实施方式的移动体控制装置具备:识别部,其基于由摄像部拍摄到的第一图像来识别移动体的周边状况;行动计划生成部,其基于由所述识别部识别的识别结果来生成所述移动体的将来的行动计划;以及驾驶控制部,其基于由所述行动计划生成部生成的行动计划,来控制所述移动体的转向及速度中的至少一方,所述识别部以使用减少了所述第一图像的数据量的第二图像进行识别的第一识别模式来识别所述移动体的周边的物体,在所识别到的物体的准确度小于阈值的情况下,设为识别到了风险区域比所识别到的物体的风险区域大的其他物体。
技术研发人员:土屋成光
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!