驾驶辅助装置、车辆、驾驶辅助方法以及存储介质与流程
本发明涉及驾驶辅助装置、车辆、驾驶辅助方法以及存储介质。
背景技术:
1、在专利文献1中公开了一种在高速公路的主道上控制车道变更的车辆的控制技术。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2020-163927号公报
技术实现思路
1、发明所要解决的课题
2、在通过自动驾驶从高速公路的主道向分支路进行车道变更时,在分支路内,从交通的安全性、交通的顺畅性的观点出发,需要使驾驶辅助控制顺畅地结束。
3、本发明的目的在于提供一种驾驶辅助技术,在提高交通的安全性的同时,抑制交通的顺畅性的降低,具体而言,提供一种驾驶辅助技术,在从行驶车道跨越划分线向分支车道进行车道变更之后,使驾驶辅助在分支车道内顺畅地结束。
4、用于解决问题的手段
5、本发明的一个方式所涉及的驾驶辅助装置是车辆中的驾驶辅助装置,具备控制机构,该控制机构通过能够由系统主导自动地进行车道变更的驾驶辅助,从所述车辆所行驶的行驶车道向从所述行驶车道分支的分支车道进行车道变更,
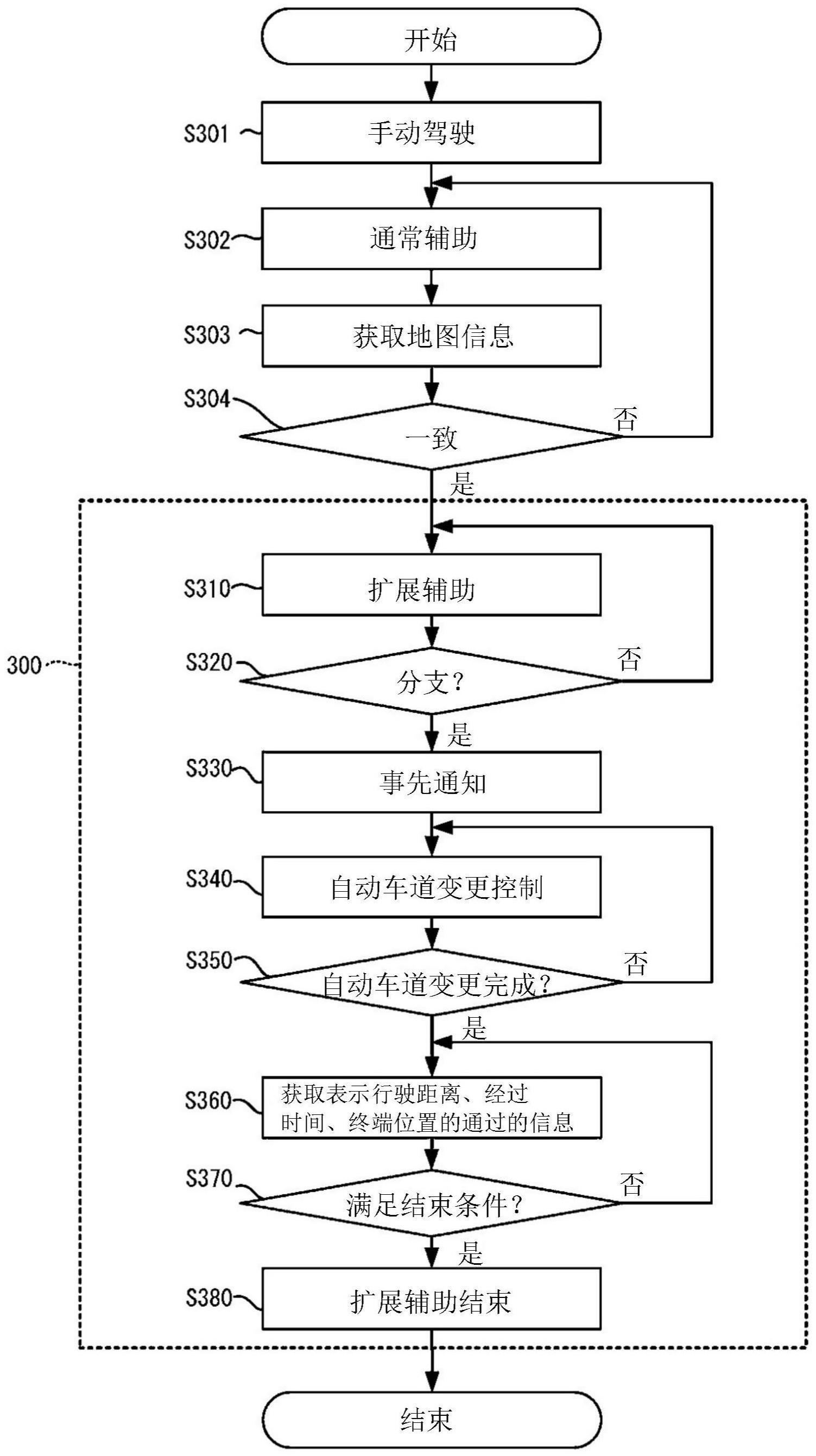
6、所述控制机构在跨越所述行驶车道的划分线而所述车道变更完成之后,获取表示在分支车道内的行驶距离、在分支车道内的经过时间、通过了基于地图信息或者外界识别信息检测出的所述分支车道的末端位置的信息,
7、在所述行驶距离超过预定的阈值距离的情况下,或者在所述经过时间超过预定的阈值时间的情况下,或者在通过了基于地图信息或者外界识别信息检测出的所述分支车道的末端位置的情况下,所述控制机构在所述分支车道内结束所述驾驶辅助。
8、另外,本发明的其他方式所涉及的驾驶辅助方法是车辆中的驾驶辅助装置的驾驶辅助方法,具备:控制步骤,通过能够由系统主导自动地进行车道变更的驾驶辅助,从所述车辆所行驶的行驶车道向从所述行驶车道分支的分支车道进行车道变更,在所述控制步骤中,在跨越所述行驶车道的划分线而所述车道变更完成之后,获取表示在分支车道内的行驶距离、在分支车道内的经过时间、通过了基于地图信息或者外界识别信息而检测出的所述分支车道的末端位置的信息,在所述行驶距离超过预定的阈值距离的情况下,或者在所述经过时间超过预定的阈值时间的情况下,或者在通过了基于地图信息或者外界识别信息而检测出的所述分支车道的末端位置的情况下,在所述分支车道内结束所述驾驶辅助。
9、发明效果
10、根据本发明,能够在从行驶车道跨越划分线向分支车道进行车道变更之后,使驾驶辅助在分支车道内顺畅地结束。
技术特征:
1.一种驾驶辅助装置,该驾驶辅助装置是车辆中的驾驶辅助装置,
2.根据权利要求1所述的驾驶辅助装置,其特征在于,所述控制机构判定为了到达基于地图信息而设定好的目的地,是否需要向分支车道执行车道变更,在判定为需要执行车道变更的情况下,决定进行车道变更的分支车道。
3.根据权利要求2所述的驾驶辅助装置,其特征在于,所述控制机构在距所述分支车道的分支开始的基准位置预定距离跟前的通知位置,事先通知向所述分支车道的车道变更预告和在分支车道内结束所述驾驶辅助。
4.根据权利要求1至3中任一项所述的驾驶辅助装置,其特征在于,
5.根据权利要求4所述的驾驶辅助装置,其特征在于,在由所述驾驶员经由输入装置输入批准指示、并且地图信息与由拍摄装置拍摄到的图像信息一致的情况下,所述控制机构提供由所述系统主导自动地进行的车道变更的功能。
6.根据权利要求5所述的驾驶辅助装置,其特征在于,在未输入所述批准指示的情况下,或者在所述地图信息与所述图像信息不一致的情况下,所述控制机构提供所述驾驶员主导的车道变更的功能。
7.根据权利要求1所述的驾驶辅助装置,其特征在于,所述控制机构从距所述分支车道的分支开始的基准位置预定距离跟前的变更开始位置开始所述车道变更。
8.根据权利要求7所述的驾驶辅助装置,其特征在于,
9.根据权利要求8所述的驾驶辅助装置,其特征在于,所述控制机构从距所述分支车道的分支开始的基准位置预定距离跟前的位置、且比开始所述车道变更的所述变更开始位置靠跟前的闪烁开始位置开始所述车辆的方向指示灯的闪烁。
10.根据权利要求9所述的驾驶辅助装置,其特征在于,
11.根据权利要求1所述的驾驶辅助装置,其特征在于,所述末端位置是所述分支车道的结束位置,且是设置于所述末端位置的附近的导流带的端部的位置。
12.根据权利要求1所述的驾驶辅助装置,其特征在于,
13.一种车辆,其具有驾驶辅助功能,其中,所述车辆具备权利要求1所述的驾驶辅助装置。
14.一种驾驶辅助方法,该驾驶辅助方法是车辆中的驾驶辅助装置的驾驶辅助方法,
15.一种存储介质,存储有使计算机执行权利要求14所述的驾驶辅助方法的程序。
技术总结
本发明提供驾驶辅助装置、车辆、驾驶辅助方法以及存储介质,在从行驶车道跨越划分线向分支车道进行车道变更之后,使驾驶辅助在分支车道内顺畅地结束。车辆中的驾驶辅助装置具备控制部,该控制部通过能够由系统主导自动地进行车道变更的驾驶辅助,从车辆行驶的行驶车道向从行驶车道分支的分支车道进行车道变更。控制部在跨越行驶车道的划分线完成车道变更之后,获取表示在分支车道内的行驶距离、在分支车道内的经过时间、通过了基于地图信息或外界识别信息检测出的分支车道的末端位置的信息,在行驶距离超过预定的阈值距离的情况下,或者经过时间超过预定的阈值时间的情况下,或者在通过了分支车道的末端位置的情况下,在分支车道内结束驾驶辅助。
技术研发人员:加藤大智,西口辽彦,二寺晓郎
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!