驾驶辅助装置的制作方法
本发明涉及通过自动制动器使自身车辆停止、将停止了的自身车辆保持为停止状态的驾驶辅助装置。
背景技术:
1、已知通过自动制动器强制地使自身车辆停止的技术。例如,以往的碰撞躲避辅助装置在由摄像头传感器以及雷达传感器等的前方传感器检测到自身车辆碰撞的可能性高的障碍物的情况下,通过提高供给至制动器装置的工作油的油压(制动器油压),使自动制动器工作而使自身车辆停止。这样的辅助装置在通过自动制动器使自身车辆停止之后,也在预定时间的期间(例如2秒期间)通过执行将制动器油压维持为高的油压的停止保持控制,将自身车辆保持为停止状态。
2、另外,日本特开2019-84984所提出的辅助装置(称为相关技术的装置)在判定为希望从自身车辆通过自动制动器而停止了的时间点开始超过预定时间地将自身车辆保持为停止状态的情况下,在检测到驾驶员的操作(例如加速踏板操作、制动踏板操作等)的定时解除(结束)停止保持控制。例如,在自身车辆停止在交叉路口的跟前的状况下、以及自身车辆检测到与该自身车辆的行进方向交叉的车辆而停止等状况下,判定为希望超过预定时间地将自身车辆保持为停止状态,在检测到驾驶员的操作的定时解除停止保持控制。
技术实现思路
1、然而,相关技术的装置只是根据检测到驾驶员的操作来解除停止保持控制。因此,有可能会检测到驾驶员的错误的踏板操作而解除停止保持控制。在该情况下,即使是原本应当保持停止状态的状况,也会无法保持停止状态。
2、在自动制动器工作了的状况下,驾驶员有时会发生动摇而未能进行适当的驾驶操作。例如,驾驶员有时会想要踩踏制动踏板,但却错误地踏下加速踏板。在该情况下,有可能会因加速踏板的操作而解除停止保持控制、且自身车辆根据加速踏板的操作而进行急加速。
3、进一步,相关技术的装置在检测到驾驶员的操作而解除停止保持控制的情况下,没有考虑自身车辆周围的状况。因此,在根据驾驶员的错误的踏板操作而解除了停止保持控制的情况下,有可能会发生自身车辆与障碍物碰撞或者自身车辆违反法规而起步。
4、本发明提供在推定为即使解除停止保持控制、自身车辆也安全的情况下解除停止保持控制的技术。
5、本发明的一技术方案涉及驾驶辅助装置。所述驾驶辅助装置具备:自动制动部,其构成为在判定为预定的自动停止条件成立时执行自动制动控制,所述自动制动控制是向自身车辆提供制动力来使所述自身车辆自动地停止的控制;停止保持部,其构成为执行停止保持控制以使得处于通过所述自动制动部而停止了的状态的所述自身车辆既不前进也不后退,所述停止保持控制是通过对所述自身车辆提供制动力来使所述自身车辆持续停止的控制;停止保持解除部,其构成为在通过所述停止保持部执行所述停止保持控制的情况下,在判定为预定的解除条件成立时使所述停止保持部解除所述停止保持控制;周围信息取得部,其构成为取得周围信息,所述周围信息是表示所述自身车辆周围的状况的信息;操作信息取得部,其构成为取得操作信息,所述操作信息是关于所述自身车辆的驾驶员的驾驶操作的信息;操作判定部,其构成为基于所述取得的周围信息和所述取得的操作信息,判定执行所述停止保持控制的情况下的所述驾驶操作相对于所述周围的状况是否适当;以及禁止部,其构成为即使是在所述解除条件成立的情况下,若通过所述操作判定部判定为所述驾驶操作不适当,则也禁止所述停止保持解除部使所述停止保持部解除所述停止保持控制。
6、上述技术方案的驾驶辅助装置具备自动制动部、停止保持部、停止保持解除部。自动制动部在判定为预定的自动停止条件成立时执行对自身车辆提供制动力来自动地使自身车辆停止的自动制动控制。例如,自动制动部在检测到与自身车辆碰撞的可能性高的障碍物的情况下,不需要驾驶员的制动踏板操作,就使制动器装置工作(产生制动力)来使自身车辆停止。
7、停止保持部通过执行停止保持控制,该停止保持控制通过对自身车辆提供制动力以使得通过自动制动部而处于停止了的状态的自身车辆既不前进也不后退,从而使自身车辆持续停止。由此,自身车辆被保持为停止状态。停止保持解除部在执行停止保持控制的情况下判定为预定的解除条件成立时使停止保持控制解除。以下,有时也将“解除停止保持控制”称为“解除停止保持”。
8、自身车辆的停止保持的解除需要在能确保安全的情况下进行。为此,本发明具备周围信息取得部、操作信息取得部、操作判定部、禁止部。周围信息取得部取得周围信息,该周围信息是表示自身车辆周围的状况的信息。例如,周围信息取得部取得与自身车辆周围的障碍物有关的信息。或者,周围信息取得部也可以取得对设置在自身车辆的周围的信号灯等交通基础设施设备表示的内容进行表示的信息。
9、操作信息取得部取得操作信息,该操作信息是关于自身车辆的驾驶员的驾驶操作的信息。例如,操作信息取得部取得与驾驶员的踏板操作有关的信息(加速踏板操作信息以及制动踏板操作信息)。
10、操作判定部基于所取得的周围信息和所取得的操作信息,对执行停止保持控制的情况下的驾驶操作相对于周围的状况是否适当进行判定。
11、例如,若是设为解除了停止保持控制、则自身车辆有可能不断接近障碍物的驾驶员的驾驶操作、或者自身车辆有可能进行违反法规的动作的驾驶员的驾驶操作被判定为作为执行停止保持控制的情况下的驾驶操作而相对于周围的状况不适当。
12、禁止部即使是在解除条件成立的情况下,若通过操作判定部判定为驾驶操作不适当,则也禁止停止保持解除部使停止保持部解除停止保持控制。
13、因此,根据本发明,能够在即使解除自身车辆的停止保持也安全的情况下解除自身车辆的停止保持。由此,能够抑制驾驶员无意进行的自身车辆的起步。另外,能够抑制伴随着停止保持的解除的与障碍物的碰撞。
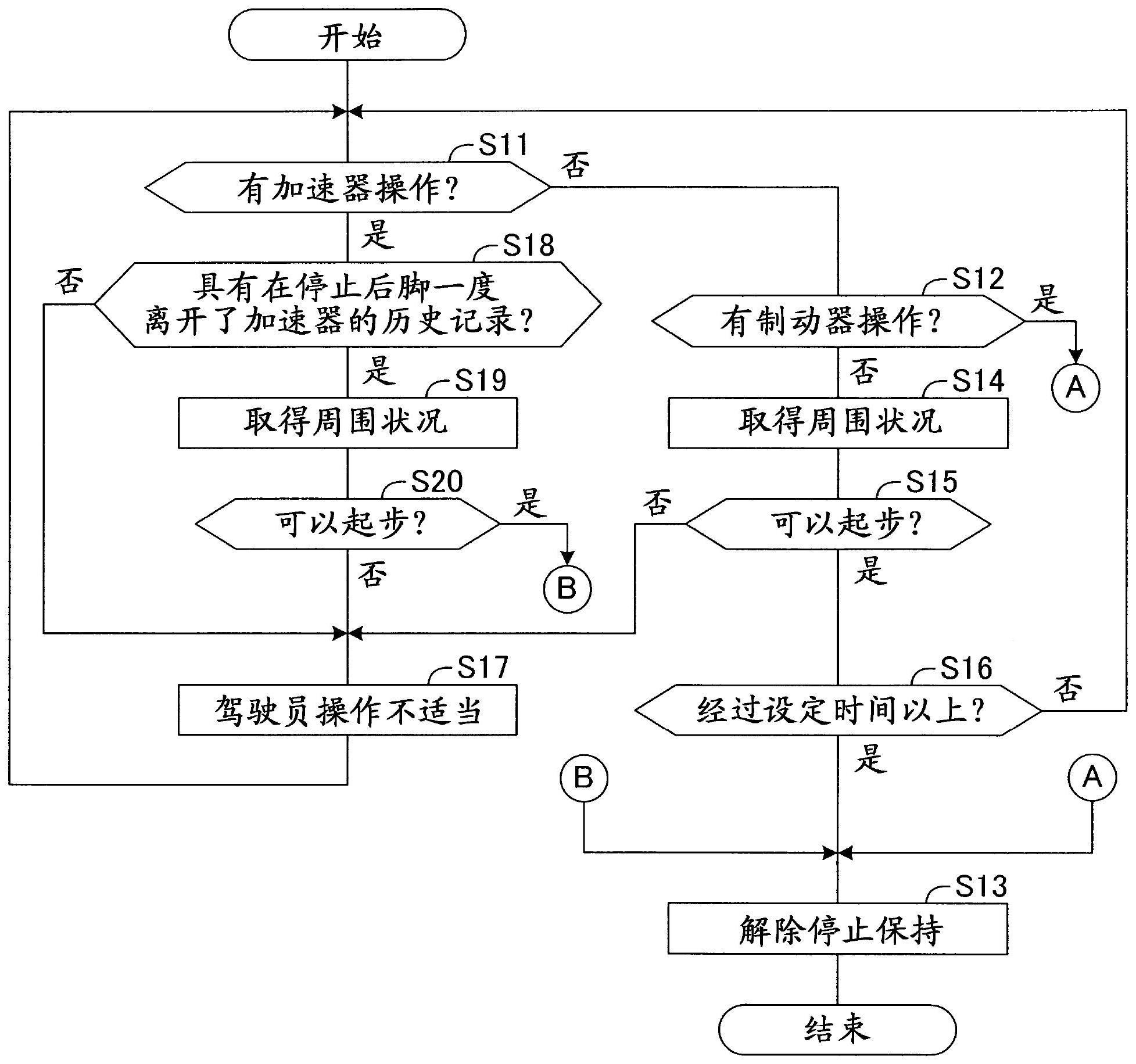
14、在上述技术方案的驾驶辅助装置中,所述停止保持解除部也可以构成为:在停止保持时间为预定的解除阈值时间以上、且加速踏板未被进行操作时判定为所述解除条件成立,所述停止保持时间是持续执行所述停止保持控制的时间。
15、在自动制动器工作了的情况下,认为在驾驶员成为能够冷静地进行判断并进行操作之前需要某种程度的时间。因此,应该使自身车辆的停止状态保持某种程度的时间。于是,在本发明的一技术方案中,在作为持续执行停止保持控制的时间的停止保持时间为预定的解除阈值时间以上、且加速踏板未被进行操作时判定为解除条件成立。在该情况下,在停止保持时间成为了预定的解除阈值时间以上时,若通过操作判定部判定为驾驶操作相对于周围的状况是适当的,则在该时间点解除停止保持控制,但若通过操作判定部判定为驾驶操作相对于周围的状况不适当,则不解除停止保持控制而继续进行停止保持控制。因此,根据上述技术方案,能够在即使解除自身车辆的停止保持也安全的情况下解除自身车辆的停止保持。
16、在上述技术方案的驾驶辅助装置中,所述停止保持解除部也可以构成为:对在执行所述停止保持控制的期间是否进行了能够推定为是基于所述驾驶员的意思的操作的特定操作进行判定,在判定为进行了所述特定操作的情况下,即使所述停止保持时间小于所述解除阈值时间,也判定为所述解除条件成立。
17、也存在从自动制动器工作而自身车辆停止起在短时间内驾驶员根据自身的意思而进行驾驶操作的情形。在该情形下,希望即使是停止保持时间到达解除阈值时间以前,也解除自身车辆的停止保持。于是,在本发明的一技术方案中,停止保持解除部对在执行停止保持控制的期间是否进行了能够推定为是基于驾驶员的意思的操作的特定操作进行判定,在判定为进行了特定操作的情况下,即使停止保持时间小于解除阈值时间,也判定为解除条件成立。但是,即使是在该情况下,在判定为进行了特定操作时,若通过操作判定部判定为驾驶操作相对于周围的状况是适当的,则停止保持控制也解除,若通过操作判定部判定为驾驶操作相对于周围的状况不适当,则不解除停止保持控制而继续进行停止保持控制。
18、因此,根据本发明的一技术方案,能够在适当的定时解除自身车辆的停止保持。由此,驾驶员能够在停止保持时间到达解除阈值时间之前的时间点使自身车辆进行起步。
19、在上述技术方案的驾驶辅助装置中,所述特定操作也可以是在执行所述停止保持控制的期间进行了的加速踏板的重新踩踏操作。
20、也即是,也可以是如下操作:从加速踏板被踩踏的状态开始,脚离开加速踏板,然后,重新踩踏加速踏板。加速踏板重新踩踏操作能够推定为是基于驾驶员的意思的驾驶操作。因此,在检测到加速踏板重新踩踏操作的情况下,若该操作相对于周围的状况是适当的,则解除自身车辆的停止保持。
21、在上述技术方案的驾驶辅助装置中,所述特定操作也可以是在执行所述停止保持控制的期间在加速踏板的操作量为零的情况下进行了的制动踏板的操作。在执行了自动制动控制的情况下未踩踏加速踏板而进行了的制动踏板操作能够推定为是基于驾驶员的意思的驾驶操作。该驾驶操作不是使自身车辆进行起步的操作,因此,相对于周围的状况是适当的。因此,能够在检测到该制动踏板操作的定时解除自身车辆的停止保持。
22、在上述技术方案的驾驶辅助装置中,所述操作判定部也可以构成为:在执行所述停止保持控制的期间,基于所述取得的周围信息判定为存在有可能会与所述自身车辆碰撞的障碍物、且基于所述取得的操作信息判定为加速踏板被进行了操作的情况下,判定为所述驾驶操作不适当。
23、由此,即使驾驶员错误地进行加速踏板操作,自身车辆的停止保持不被解除,因此,能够抑制自身车辆与障碍物的碰撞。
24、在上述技术方案的驾驶辅助装置中,所述操作判定部也可以构成为:在执行所述停止保持控制的期间,基于所述取得的周围信息判定为存在有可能会与所述自身车辆碰撞的障碍物、且基于所述取得的操作信息判定为制动踏板未被进行操作的情况下,判定为所述驾驶操作不适当。
25、当在未进行制动踏板操作的状态下停止保持被解除时,自身车辆会因蠕行现象而起步。在本发明的一技术方案中,在存在有可能与自身车辆碰撞的障碍物的情况下,当制动踏板未被操作时,停止保持不被解除。因此,能够抑制因蠕行行驶引起的自身车辆与障碍物的碰撞。
26、在上述技术方案的驾驶辅助装置中,所述操作判定部也可以构成为:在执行所述停止保持控制的期间,基于所述取得的周围信息判定为发生所述自身车辆的起步在法规上被禁止的状况、且基于所述取得的操作信息判定为加速踏板被进行了操作的情况下,判定为所述驾驶操作不适当。
27、例如,在自身车辆在交叉路口的跟前保持为停止状态的情况下,当交叉路口的信号灯表示红时,自身车辆不得进入到交叉路口。在本发明的一技术方案中,在这样的自身车辆的起步在法规上被禁止的状况下,即使驾驶员进行与自身的意图不同的加速踏板操作,自身车辆的停止保持也不被解除。由此,能够遵守法规。另外,能够抑制自身车辆与其他车辆以及行人等碰撞。
28、在上述技术方案的驾驶辅助装置中,所述操作判定部也可以构成为:在执行所述停止保持控制的期间,基于所述取得的周围信息判定为发生所述自身车辆的起步在法规上被禁止的状况、且基于所述取得的操作信息判定为制动踏板未被进行操作的情况下,判定为所述驾驶操作不适当。
29、在本发明的一技术方案中,在驾驶员未进行制动踏板操作、并产生自身车辆的起步在法规上被禁止的状况的情况下,自身车辆的停止保持不被解除。由此,能够遵守法规。另外,能够抑制自身车辆与其他车辆以及行人等碰撞。
30、在上述技术方案的驾驶辅助装置中,所述操作判定部也可以构成为:在执行所述停止保持控制的期间,对所述驾驶员是否坐在驾驶席进行判定,在判定为所述驾驶员未坐在所述驾驶席的情况下,判定为所述驾驶操作不适当。
- 还没有人留言评论。精彩留言会获得点赞!