分布式拖滞扭矩控制方法、系统及可读存储介质与流程
本发明涉及车辆控制,尤其涉及一种分布式拖滞扭矩控制方法、系统及可读存储介质。
背景技术:
1、新能源电动车,处于冰雪路面弯道制动工况或者砂石路面弯道制动工况时,进行能量回收的车轮易抱死,如果前轴车轮打滑,车辆容易失去转向能力,而后轴车轮打滑,车辆则更容易发生侧滑和甩尾。因此,如何减少车轮打滑带来的风险是亟待解决的技术问题。
技术实现思路
1、本发明的主要目的在于提供一种分布式拖滞扭矩控制方法、系统及可读存储介质,旨在解决现有技术中车轮打滑时容易发生行车事故的技术问题。
2、第一方面,本发明提供一种分布式拖滞扭矩控制方法,所述分布式拖滞扭矩控制方法包括:
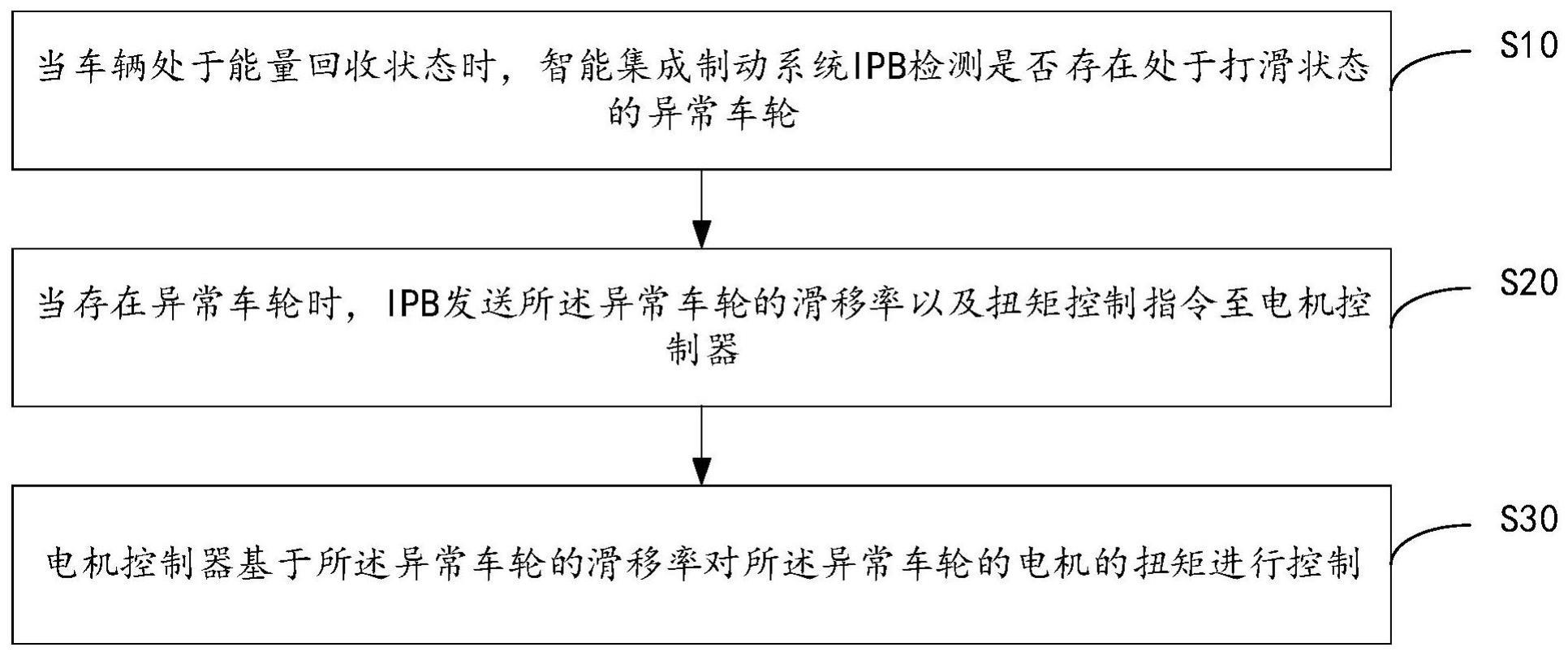
3、当车辆处于能量回收状态时,智能集成制动系统ipb检测是否存在处于打滑状态的异常车轮;
4、当存在异常车轮时,ipb发送所述异常车轮的滑移率以及扭矩控制指令至电机控制器;
5、电机控制器基于所述异常车轮的滑移率对所述异常车轮的电机的扭矩进行控制。
6、可选的,当车辆的档位为前进挡、车速大于预设车速、制动踏板以及加速踏板的开度为零且电机扭矩为负扭矩时,ipb确定车辆处于能量回收状态。
7、可选的,当车辆的档位为前进挡、制动踏板的开度不为零且电机扭矩为负扭矩时,ipb确定车辆处于能量回收状态。
8、可选的,所述电机控制器基于所述异常车轮的滑移率对所述异常车轮的电机的扭矩进行控制的步骤包括:
9、电机控制器根据滑移率和电机转速的对应关系,确定所述异常车轮的滑移率对应的目标电机转速;
10、以所述目标电机转速为目标,对所述异常车轮的电机的扭矩进行pid控制。
11、可选的,所述智能集成制动系统ipb检测是否存在处于打滑状态的异常车轮的步骤包括:
12、智能集成制动系统ipb获取车速以及各个车轮的轮速;
13、根据车速以及各个车轮的轮速计算得到各个车轮的滑移率;
14、以滑移率大于预设滑移率的车轮作为处于打滑状态的异常车轮。
15、第二方面,本发明还提供一种分布式拖滞扭矩控制系统,所述分布式拖滞扭矩控制系统包括智能集成制动系统ipb以及电机控制器,其中:
16、智能集成制动系统ipb,用于当车辆处于能量回收状态时,检测是否存在滑移率大于预设滑移率的异常车轮;当存在异常车轮时,发送扭矩控制指令至电机控制器;
17、电机控制器,用于基于所述异常车轮的滑移率对所述异常车轮的电机的扭矩进行控制。
18、可选的,所述电机控制器,用于:
19、电机控制器根据滑移率和电机转速的对应关系,确定所述异常车轮的滑移率对应的目标电机转速;
20、以所述目标电机转速为目标,对所述异常车轮的电机的扭矩进行pid控制。
21、可选的,所述智能集成制动系统ipb,用于:
22、智能集成制动系统ipb获取车速以及各个车轮的轮速;
23、根据车速以及各个车轮的轮速计算得到各个车轮的滑移率;
24、以滑移率大于预设滑移率的车轮作为处于打滑状态的异常车轮。
25、可选的,当车辆的档位为前进挡、车速大于预设车速、制动踏板以及加速踏板的开度为零且电机扭矩为负扭矩时,ipb确定车辆处于能量回收状态。
26、可选的,当车辆的档位为前进挡、制动踏板的开度不为零且电机扭矩为负扭矩时,ipb确定车辆处于能量回收状态。
27、第三方面,本发明还提供一种分布式拖滞扭矩控制系统,所述分布式拖滞扭矩控制系统包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的分布式拖滞扭矩控制程序,其中所述分布式拖滞扭矩控制程序被所述处理器执行时,实现如上所述的分布式拖滞扭矩控制方法的步骤。
28、第四方面,本发明还提供一种可读存储介质,所述可读存储介质上存储有分布式拖滞扭矩控制程序,其中所述分布式拖滞扭矩控制程序被处理器执行时,实现如上所述的分布式拖滞扭矩控制方法的步骤。
29、本发明中,当车辆处于能量回收状态时,智能集成制动系统ipb检测是否存在处于打滑状态的异常车轮;当存在异常车轮时,ipb发送所述异常车轮的滑移率以及扭矩控制指令至电机控制器;电机控制器基于所述异常车轮的滑移率对所述异常车轮的电机的扭矩进行控制。通过本发明,当车轮打滑时,根据异常车轮的滑移率对异常车轮的电机的扭矩进行控制,从而消除车轮打滑导致的车辆侧滑失稳问题,提升车辆的行车稳定性。且,是直接通过电机控制器对异常车轮的电机的扭矩进行控制,相较于通过ipb进行扭矩控制的方式,能更快的完成扭矩控制。
技术特征:
1.一种分布式拖滞扭矩控制方法,其特征在于,所述分布式拖滞扭矩控制方法包括:
2.如权利要求1所述的分布式拖滞扭矩控制方法,其特征在于,当车辆的档位为前进挡、车速大于预设车速、制动踏板以及加速踏板的开度为零且电机扭矩为负扭矩时,ipb确定车辆处于能量回收状态。
3.如权利要求1所述的分布式拖滞扭矩控制方法,其特征在于,当车辆的档位为前进挡、制动踏板的开度不为零且电机扭矩为负扭矩时,ipb确定车辆处于能量回收状态。
4.如权利要求1所述的分布式拖滞扭矩控制方法,其特征在于,所述电机控制器基于所述异常车轮的滑移率对所述异常车轮的电机的扭矩进行控制的步骤包括:
5.如权利要求1所述的分布式拖滞扭矩控制方法,其特征在于,所述智能集成制动系统ipb检测是否存在处于打滑状态的异常车轮的步骤包括:
6.一种分布式拖滞扭矩控制系统,其特征在于,所述分布式拖滞扭矩控制系统包括智能集成制动系统ipb以及电机控制器,其中:
7.如权利要求6所述的分布式拖滞扭矩控制系统,其特征在于,所述电机控制器,用于:
8.如权利要求6所述的分布式拖滞扭矩控制系统,其特征在于,所述智能集成制动系统ipb,用于:
9.一种分布式拖滞扭矩控制系统,其特征在于,所述分布式拖滞扭矩控制系统包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的分布式拖滞扭矩控制程序,其中所述分布式拖滞扭矩控制程序被所述处理器执行时,实现如权利要求1至5中任一项所述的分布式拖滞扭矩控制方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有分布式拖滞扭矩控制程序,其中所述分布式拖滞扭矩控制程序被处理器执行时,实现如权利要求1至5中任一项所述的分布式拖滞扭矩控制方法的步骤。
技术总结
本发明提供一种分布式拖滞扭矩控制方法、系统及可读存储介质。分布式拖滞扭矩控制方法包括:当车辆处于能量回收状态时,智能集成制动系统IPB检测是否存在处于打滑状态的异常车轮;当存在异常车轮时,IPB发送所述异常车轮的滑移率以及扭矩控制指令至电机控制器;电机控制器基于所述异常车轮的滑移率对所述异常车轮的电机的扭矩进行控制。通过本发明,当车轮打滑时,根据异常车轮的滑移率对异常车轮的电机的扭矩进行控制,从而消除车轮打滑导致的车辆侧滑失稳问题,提升车辆的行车稳定性。且,是直接通过电机控制器对异常车轮的电机的扭矩进行控制,相较于通过IPB进行扭矩控制的方式,能更快的完成扭矩控制。
技术研发人员:刘滨,李烁,董威,裴金顺,翟润国
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!