一种车灯照明控制方法、车灯照明控制系统、设备及介质与流程
本技术涉及汽车照明,具体而言,涉及一种车灯照明控制方法、车灯照明控制系统、设备及介质。
背景技术:
1、如今汽车的使用越来越普及,随着汽车数量的急剧增加,行车安全变得越来越重要。传统的汽车前照灯光型分布单一,大多数采用固定灯源,会存在很多问题,在一些特殊的行车环境中往往表现不佳。比如在雨天行驶时,由于路面积水的反射作用,驾驶者会被路面积水反射的光线影响视线,存在较大的安全隐患。因此,如何自适应控制车灯照明路线以避开行驶道路上的反光区域,为驾驶者提供最佳的道路照明成为了不容小觑的技术问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种车灯照明控制方法、车灯照明控制系统、设备及介质,控制车灯照明路线避开行驶道路上的反光区域,有效降低了环境中反射光与折射光的干扰,提高了车辆前照灯的主动安全系数,进而提高整车驾驶安全,为驾驶者提供最佳的道路照明。
2、第一方面,本技术实施例提供了一种车灯照明控制方法,所述车灯照明控制方法应用于一种车灯照明控制系统,所述车灯照明控制系统包括图像采集模块,中央处理模块和车灯控制模块,所述车灯照明控制方法包括:
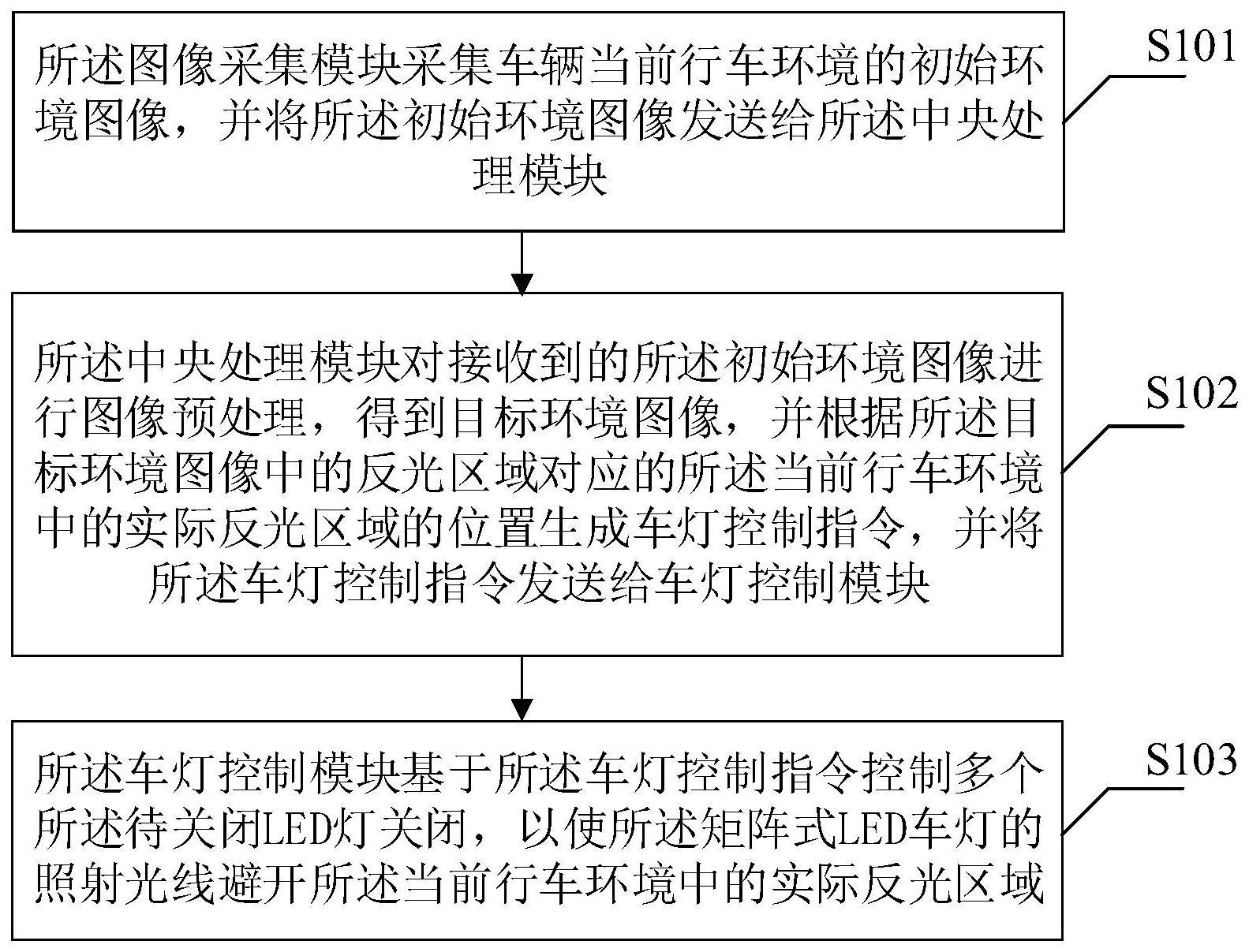
3、所述图像采集模块采集车辆当前行车环境的初始环境图像,并将所述初始环境图像发送给所述中央处理模块;
4、所述中央处理模块对接收到的所述初始环境图像进行图像预处理,得到目标环境图像,并根据所述目标环境图像中的反光区域对应的所述当前行车环境中的实际反光区域的位置生成车灯控制指令,并将所述车灯控制指令发送给车灯控制模块;其中,所述车灯控制指令中包括所述车辆的矩阵式led车灯中多个待关闭led灯的标识信息,所述待关闭led灯的照射光线经过所述实际反光区域;
5、所述车灯控制模块基于所述车灯控制指令控制多个所述待关闭led灯关闭,以使所述矩阵式led车灯的照射光线避开所述当前行车环境中的实际反光区域。
6、进一步的,所述中央处理模块通过以下步骤从所述目标环境图像中确定出所述反光区域:
7、采用边缘检测算法对所述目标环境图像进行反光区域检测,得到反光区域边缘图像,并将所述反光区域边缘图像分割为多张区域子图像;
8、将多张所述区域子图像输入到预先训练好的反光区域检测模型中,从多张所述区域子图像中确定出至少一张存在所述反光区域的反光子图像;
9、针对于每张反光子图像,基于该反光子图像在所述目标环境图像中的位置从所述目标环境图像中确定出该反光子图像对应的反光区域。
10、进一步的,所述中央处理模块通过以下步骤训练所述反光区域检测模型:
11、获取多张样本图像;
12、针对多张所述样本图像中每一张带有反光样本区域的样本图像,确定所述反光样本区域在该样本图像中的第一位置区域;
13、针对每一张所述样本图像,将该样本图像输入到反光区域原始检测模型中,得到反光预测区域的第二位置区域;
14、基于所述反光样本区域在该样本图像中的第一位置区域,以及所述反光预测区域的第二位置区域,对所述反光区域原始检测模型进行训练,得到所述反光区域检测模型。
15、进一步的,所述基于所述反光样本区域在该样本图像中的第一位置区域,以及所述反光预测区域的第二位置区域,对所述反光区域原始检测模型进行训练,得到所述反光区域检测模型,包括:
16、若所述反光预测区域对应的样本图像为未带有反光样本区域的图像,则调整所述反光区域原始检测模型的训练参数,直至所述反光区域原始检测模型输出的反光预测区域为空;
17、若所述反光预测区域对应的样本图像为带有反光样本区域的图像,则将所述反光样本区域在该样本图像中的第一位置区域与所述反光预测区域的第二位置区域进行对比,计算当前状态下所述反光区域原始检测模型的损失函数;
18、基于所述反光区域原始检测模型的损失函数,不断调整所述反光区域原始检测模型的训练参数,直至所述反光区域原始检测模型达到收敛状态,得到所述反光区域检测模型。
19、进一步的,所述中央处理模块根据所述目标环境图像中的反光区域对应的所述当前行车环境中的实际反光区域的位置生成车灯控制指令,包括:
20、针对所述目标环境图像中的每个反光区域,确定出该反光区域在所述目标环境图像中的位置坐标;
21、基于所述图像采集模块的标定参数,以及该反光区域在所述目标环境图像中的位置坐标,确定出该反光区域在所述当前行车环境中对应的实际反光区域的三维空间坐标;
22、基于所述矩阵式led车灯中的每个led灯的光路信息,从多个led灯中确定出光线传播路径经过该三维空间坐标对应的空间位置的待关闭led灯;
23、基于所述待关闭led灯的标识信息生成所述车灯控制指令。
24、进一步的,所述车灯照明控制系统还包括光照检测模块、雨量检测模块和中控模块,所述车灯照明控制方法还包括:
25、所述光照检测模块实时检测所述当前行车环境的光照强度,并将所述光照强度发送给所述中控模块;
26、所述雨量检测模块实时检测所述当前行车环境的雨量值,并将所述雨量值发送给所述中控模块;
27、所述中控模块对所述光照强度和所述雨量值进行显示。
28、进一步的,所述车灯照明控制方法还包括:
29、所述中控模块响应于用户对于照明控制功能的相关操作,生成照明控制指令,并将所述照明控制指令发送给所述图像采集模块、所述中央处理模块和所述车灯控制模块,以使所述图像采集模块、所述中央处理模块和所述车灯控制模块开始工作。
30、第二方面,本技术实施例还提供了一种车灯照明控制系统,所述车灯照明控制系统包括:
31、图像采集模块,用于采集车辆当前行车环境的初始环境图像,并将所述初始环境图像发送给中央处理模块;
32、中央处理模块,用于对接收到的所述初始环境图像进行图像预处理,得到目标环境图像,并根据所述目标环境图像中的反光区域对应的所述当前行车环境中的实际反光区域的位置生成车灯控制指令,并将所述车灯控制指令发送给车灯控制模块;其中,所述车灯控制指令中包括所述车辆的矩阵式led车灯中多个待关闭led灯的标识信息,所述待关闭led灯的照射光线经过所述实际反光区域;
33、车灯控制模块,用于基于所述车灯控制指令控制多个所述待关闭led灯关闭,以使所述矩阵式led车灯的照射光线避开所述当前行车环境中的实际反光区域。
34、第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的车灯照明控制方法的步骤。
35、第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的车灯照明控制方法的步骤。
36、本技术实施例提供的一种车灯照明控制方法、车灯照明控制系统、设备及介质,首先,图像采集模块采集车辆当前行车环境的初始环境图像,并将所述初始环境图像发送给中央处理模块;然后,中央处理模块对接收到的所述初始环境图像进行图像预处理,得到目标环境图像,并根据所述目标环境图像中的反光区域对应的所述当前行车环境中的实际反光区域的位置生成车灯控制指令,并将所述车灯控制指令发送给车灯控制模块;最后,车灯控制模块基于所述车灯控制指令控制多个所述待关闭led灯关闭,以使所述矩阵式led车灯的照射光线避开所述当前行车环境中的实际反光区域。
37、与现有技术中的照明控制方法相比,本技术将矩阵式led车灯中多个会照射到反光区域的led灯关闭,实现对车灯照明区域的控制,控制车灯照明路线避开行驶道路上的反光区域。有效降低了环境中反射光与折射光的干扰,提高了车辆前照灯的主动安全系数,进而提高整车驾驶安全,为驾驶者提供最佳的道路照明。
38、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!