一种车辆及其自动驾驶方法、装置和存储介质与流程
本技术实施例涉及车辆控制技术,尤指一种车辆及其自动驾驶方法、装置和存储介质。
背景技术:
1、随着科技的不断发展,汽车智能驾驶越来越成为各大车企的重点研发方向。如何寻求更高级别的智能驾驶功能是大家一致追求的方向,根据业界共识和相关资料显示,高精度地图已经成为高级别的智能驾驶技术中不可或缺的重要组成部分。
2、更高级别的智能驾驶对车辆行驶安全性要求极高,车辆在智能驾驶过程中,车载高精地图作为车载感知传感器的一个有效补充,车辆需要实时获取车辆所在道路环境的高精地图数据和感知传感器数据。当车载感知传感器受制于天气、光照、大坡度大转弯道路导致传感器获取的车辆所处道路环境的数据的可信度降低或完全不可用时,或当车辆获取的高精地图数据和感知传感器数据出现不一致的情况下,业界通常的做法是信赖并使用高精地图数据。
3、由于高精地图数据制作和发布的复杂性和周期性,业界高精地图厂商对现有地图的更新频率一般在一个季度以上,甚至达半年到一年之久。这就引出一个高精地图和现实道路的时效性问题,比如:实际道路的限速值调整不会很快的更新到高精地图里面去,实际道路有车道施工但高精地图里没有体现等等;诸如此类问题,会影响智能驾驶系统的一些判断,进而会导致智能驾驶做出一些错误的决策,从而影响智能驾驶的安全性和用户体验。
4、另外,在复杂的道路和交通场景下,智能驾驶功能往往并不能百分百的保证驾驶安全。同时,受限于当前智能技术的客观发展水平,智能驾驶功能也不可能安全的处理所有的道路和交通场景,这样就会引发相应的驾驶安全问题。
技术实现思路
1、本技术提供了一种车辆及其自动驾驶方法、装置和存储介质,能够帮助车辆的自动驾驶功能适时退出或降级,确保行车安全,并能够解决地图时效性差异问题,对提高智能驾驶的安全性和用户体验有重大帮助。
2、本技术实施例提供了一种自动驾驶方法,所述方法可以包括:
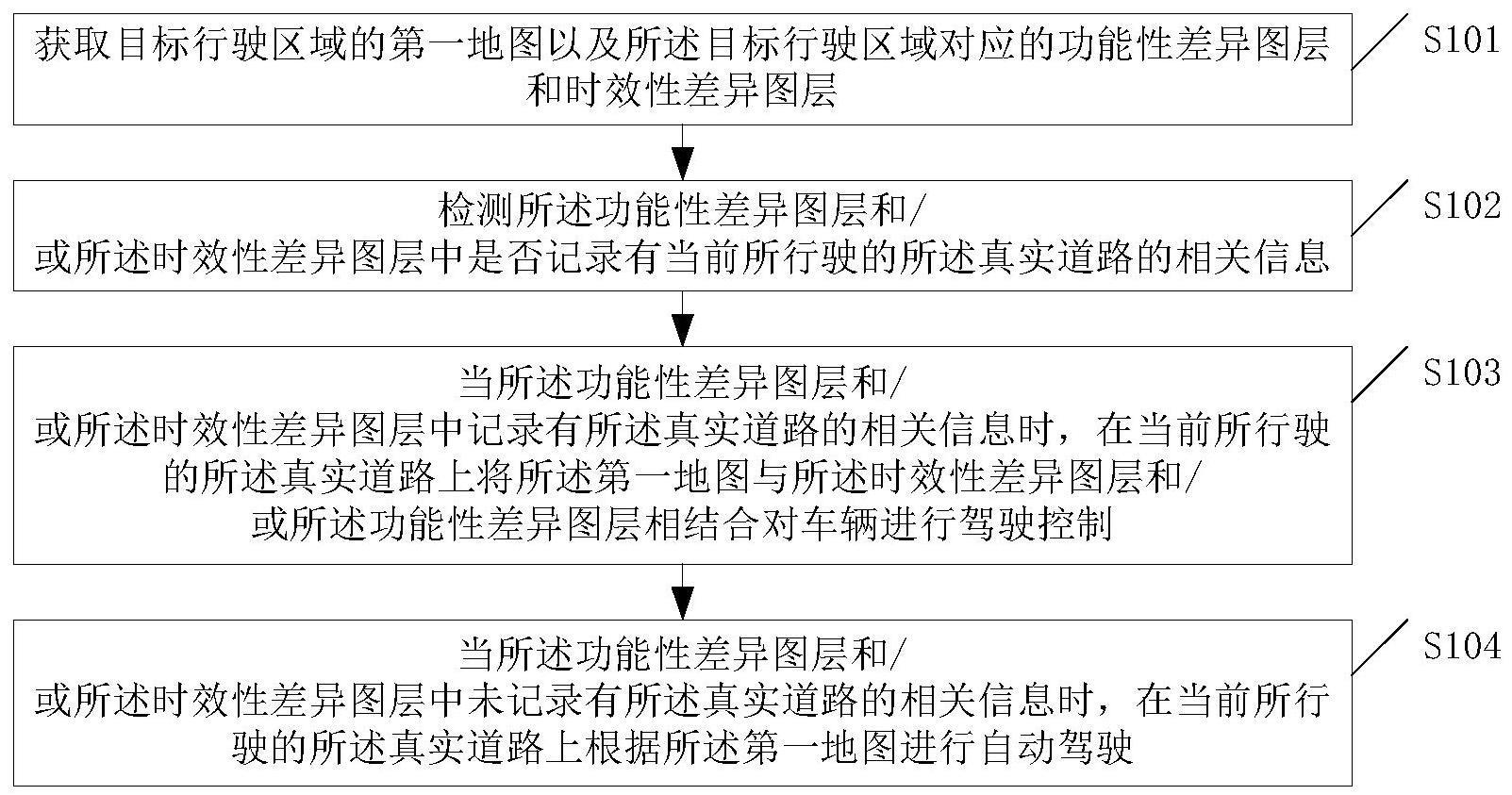
3、获取目标行驶区域的第一地图以及所述目标行驶区域对应的功能性差异图层和时效性差异图层;所述功能性差异图层包含用于表征所述目标行驶区域的真实道路中的行驶路段是否存在自动驾驶异常点的黑名单和/或白名单;所述时效性差异图层用于修复地图中道路属性与真实道路的道路属性的差异;
4、检测所述功能性差异图层和/或所述时效性差异图层中是否记录有当前所行驶的所述真实道路的相关信息;
5、当所述功能性差异图层和/或所述时效性差异图层中记录有所述真实道路的相关信息时,在当前所行驶的所述真实道路上将所述第一地图与所述时效性差异图层和/或所述功能性差异图层相结合对车辆进行驾驶控制;
6、当所述功能性差异图层和/或所述时效性差异图层中未记录有所述真实道路的相关信息时,在当前所行驶的所述真实道路上根据所述第一地图进行自动驾驶。
7、在本技术的示例性实施例中,所述检测所述功能性差异图层中是否记录有当前所行驶的所述真实道路的相关信息,可以包括:
8、车载的电子地平线道路模块在生成电子地平线数据时,从所述第一地图中读取所述真实道路上车辆位置前方预设距离内的道路数据;
9、根据所述道路数据判断所述功能性差异图层中是否存在与所述真实道路的道路场景相匹配的道路场景类型的配置信息,以及所述道路场景类型对应的白名单或黑名单;
10、当判定所述功能性差异图层中存在与所述真实道路的道路场景相匹配的道路场景类型的配置信息,或者,存在所述道路场景类型对应的白名单或黑名单时,确定所述功能性差异图层中记录有当前所行驶的所述真实道路的相关信息。
11、在本技术的示例性实施例中,所述根据所述道路数据判断所述功能性差异图层中是否存在与所述真实道路的道路场景相匹配的道路场景类型的配置信息,以及所述道路场景类型对应的白名单或黑名单,可以包括:
12、根据所述道路数据分辨出车辆前方道路的道路场景;
13、所述电子地平线道路模块读取所述功能性差异图层,在所述功能性差异图层中寻找是否存在与所述道路场景相匹配的道路场景类型的配置信息;
14、当所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息时,根据所述道路场景相匹配的道路场景类型的开关状态检测所述真实道路的道路相关信息是否存在于所述道路场景类型对应的白名单或黑名单中。
15、在本技术的示例性实施例中,所述根据所述道路场景相匹配的道路场景类型的开关状态检测所述真实道路的道路相关信息是否存在于所述道路场景类型对应的白名单或黑名单中,可以包括:
16、当所述道路场景相匹配的道路场景类型的开关状态为开时,检测所述真实道路的道路相关信息是否存在于所述道路场景类型对应的黑名单中;
17、当所述道路场景相匹配的道路场景类型的开关状态为关时,检测所述真实道路的道路相关信息是否存在于所述道路场景类型对应的白名单中。
18、在本技术的示例性实施例中,每个所述道路场景类型可以包含道路场景开关;
19、所述道路场景开关,可以设置为在处于开状态下时,使得所述道路场景类型的开关状态为开,开启所述道路场景,并控制该道路场景下的所述电子地平线道路模块发送所述电子地平线报文数据;在处于关状态下时,使得所述道路场景类型的开关状态为关,关闭所述道路场景,并控制该道路场景下的所述电子地平线道路模块不发送所述电子地平线报文数据;
20、所述黑名单可以包含:真实道路上表现异常的行驶路段少于表现正常的行驶路段时所述表现异常的行驶路段对应的路段信息;
21、所述白名单可以包含:真实道路上表现异常的行驶路段多于表现正常的行驶路段时所述表现正常的行驶路段对应的路段信息;
22、所述道路数据可以包括:道路身份标识id、道路坐标、车道id和/或车道编号数据;
23、所述路段信息可以包括:所在道路id、路段坐标、车道id和/或车道编号数据。
24、在本技术的示例性实施例中,所述方法还可以包括:
25、当所述功能性差异图层中不存在与所述道路场景相匹配的道路场景类型的配置信息,或者,所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息,且所述道路场景相匹配的道路场景类型的开关状态为开,所述真实道路的道路相关信息不存在于所述道路场景类型对应的黑名单中,或者,所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息,且所述道路场景相匹配的道路场景类型的开关状态为关,所述真实道路的道路相关信息存在于所述道路场景类型对应的白名单中时,检测所述时效性差异图层中是否记录有所述目标行驶区域中当前所行驶的真实道路的相关信息。
26、在本技术的示例性实施例中,所述检测所述时效性差异图层中是否记录有所述目标行驶区域中当前所行驶的真实道路的相关信息,可以包括:
27、车载的电子地平线道路模块在生成电子地平线数据时,从所述第一地图中读取所述真实道路上车辆位置前方预设距离内的道路数据;
28、将所述道路数据与所述时效性差异图层中的道路属性相比较,判断所述时效性差异图层中是否存在与所述真实道路的道路数据相匹配的道路属性;
29、当所述时效性差异图层中存在与所述真实道路的道路数据相匹配的道路属性时,确定所述时效性差异图层中记录有所述目标行驶区域中当前所行驶的真实道路的相关信息。
30、在本技术的示例性实施例中,所述在当前所行驶的所述真实道路上将所述第一地图与所述时效性差异图层和/或所述功能性差异图层相结合对车辆进行驾驶控制,可以包括:
31、当所述功能性差异图层中不存在与所述道路场景相匹配的道路场景类型的配置信息,所述时效性差异图层中记录有所述目标行驶区域中当前所行驶的真实道路的相关信息时,将所述第一地图与所述时效性差异图层相结合进行自动驾驶;
32、当所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息,所述道路场景相匹配的道路场景类型的开关状态为开,所述真实道路的道路相关信息不存在于所述道路场景类型对应的黑名单中,且所述时效性差异图层中记录有所述目标行驶区域中当前所行驶的真实道路的相关信息时,或者,当所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息,所述道路场景相匹配的道路场景类型的开关状态为关,所述真实道路的道路相关信息存在于所述道路场景类型对应的白名单中,且所述时效性差异图层中记录有所述目标行驶区域中当前所行驶的真实道路的相关信息时,将所述第一地图与所述时效性差异图层和所述功能性差异图层相结合进行自动驾驶;
33、当所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息,所述道路场景相匹配的道路场景类型的开关状态为开,所述真实道路的道路相关信息不存在于所述道路场景类型对应的黑名单中,且所述时效性差异图层中未记录有所述目标行驶区域中当前所行驶的真实道路的相关信息时,或者,当所述功能性差异图层中存在与所述道路场景相匹配的道路场景类型的配置信息,所述道路场景相匹配的道路场景类型的开关状态为关,所述真实道路的道路相关信息存在于所述道路场景类型对应的白名单中,且所述时效性差异图层中未记录有所述目标行驶区域中当前所行驶的真实道路的相关信息时,将所述第一地图与所述功能性差异图层相结合进行自动驾驶。
34、在本技术的示例性实施例中,所述将所述第一地图与所述时效性差异图层相结合进行自动驾驶,可以包括:
35、采用所述时效性差异图层中的道路属性修复当前所使用的所述第一地图中相应的道路属性,获取第二地图;根据所述第二地图进行自动驾驶;
36、所述将所述第一地图与所述功能性差异图层相结合进行自动驾驶,可以包括:
37、根据所述功能性差异图层确定针对当前行驶的真实道路所启用的白名单对应的行驶路段或者去除所述黑名单所对应的行驶路段以后的剩余行驶路段;
38、根据所述第一地图上的所述白名单对应的行驶路段或者所述剩余行驶路段进行自动驾驶。
39、在本技术的示例性实施例中,所述将所述第一地图与所述时效性差异图层和所述功能性差异图层相结合进行自动驾驶,可以包括:
40、采用所述时效性差异图层中的道路属性修复当前所使用的所述第一地图中相应的道路属性,获取第二地图;
41、根据所述功能性差异图层确定针对当前行驶的真实道路所启用的白名单对应的行驶路段或者去除所述黑名单所对应的行驶路段以后的剩余行驶路段;
42、根据所述第二地图以及所述白名单对应的行驶路段进行自动驾驶,或者,根据所述第二地图以及所述剩余行驶路段进行自动驾驶。
43、本技术实施例还提供了一种自动驾驶装置,可以包括处理器和存储器,所述存储器中存储有指令,当所述指令被所述处理器执行时,实现所述的自动驾驶方法。
44、本技术实施例还提供了一种车辆,可以包括所述的自动驾驶装置。
45、本技术实施例还提供了一种非瞬态计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时能够实现所述的自动驾驶方法。
46、本技术实施例可以包括:获取目标行驶区域的第一地图以及所述目标行驶区域对应的功能性差异图层和时效性差异图层;所述功能性差异图层包含用于表征所述目标行驶区域的真实道路中的行驶路段是否存在自动驾驶异常点的黑名单和/或白名单;所述时效性差异图层用于修复地图中道路属性与真实道路的道路属性的差异;检测所述功能性差异图层和/或所述时效性差异图层中是否记录有当前所行驶的所述真实道路的相关信息;当所述功能性差异图层和/或所述时效性差异图层中记录有所述真实道路的相关信息时,在当前所行驶的所述真实道路上将所述第一地图与所述时效性差异图层和/或所述功能性差异图层相结合对车辆进行驾驶控制;当所述功能性差异图层和/或所述时效性差异图层中未记录有所述真实道路的相关信息时,在当前所行驶的所述真实道路上根据所述第一地图进行自动驾驶。通过该实施例方案,实现了帮助车辆的自动驾驶功能适时退出或降级,确保行车安全,并解决了地图时效性差异问题,对提高智能驾驶的安全性和用户体验有重大帮助。
47、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!