后追尾预警的提示方法及装置、存储介质、电子装置与流程
本发明涉及车辆控制领域,具体而言,涉及一种后追尾预警的提示方法及装置、存储介质、电子装置。
背景技术:
1、相关技术中,随着汽车智能化水平同时越来越高,人们对汽车的智能化安全开始有更高的追求。后追尾预警功能作为智能驾驶的基础安全功能,市场上大多数车型品牌将该功能作为基础安全功能免费提供给用户使用。而作为基础安全功能的后追尾预警,用于倒车时告知车辆后方来车与本车距离过近有碰撞危险。在正常驾驶过程中时,感知后方有接近的车辆并发出警报,警示驾驶员后方来车,确保安全驾驶。
2、相关技术中,针对基础安全功能的后追尾预警功能现存如下问题:问题一:许多驾驶员在正常行驶过程中根本不会考虑正后方目标物问题,会尽可能的将注意力集中在后视镜侧后方的左右区域中又或者集中在正后方的车位线上。快速行驶后急刹会导致后方车辆没有及时反应时间,没有办法避让,从而造成更严重的恶性追尾交通事故。问题二:市场上现有的后追尾预警功能的视觉提醒仅仅是在文字提醒上,在仪表上显示文字与简单动画,同时有一个报警音声音提醒,而视觉方面仅仅只能从左右后视镜与车内中央后视镜或得到一点信息,特别是针对中央后视镜,许多新手驾驶员对中央后视镜的重视程度不够,不习惯通过它看到后车与本车距离。
3、针对相关技术中存在的上述问题,暂未发现高效且准确的解决方案。
技术实现思路
1、本发明提供了一种后追尾预警的提示方法及装置、存储介质、电子装置,以解决相关技术中的技术问题。
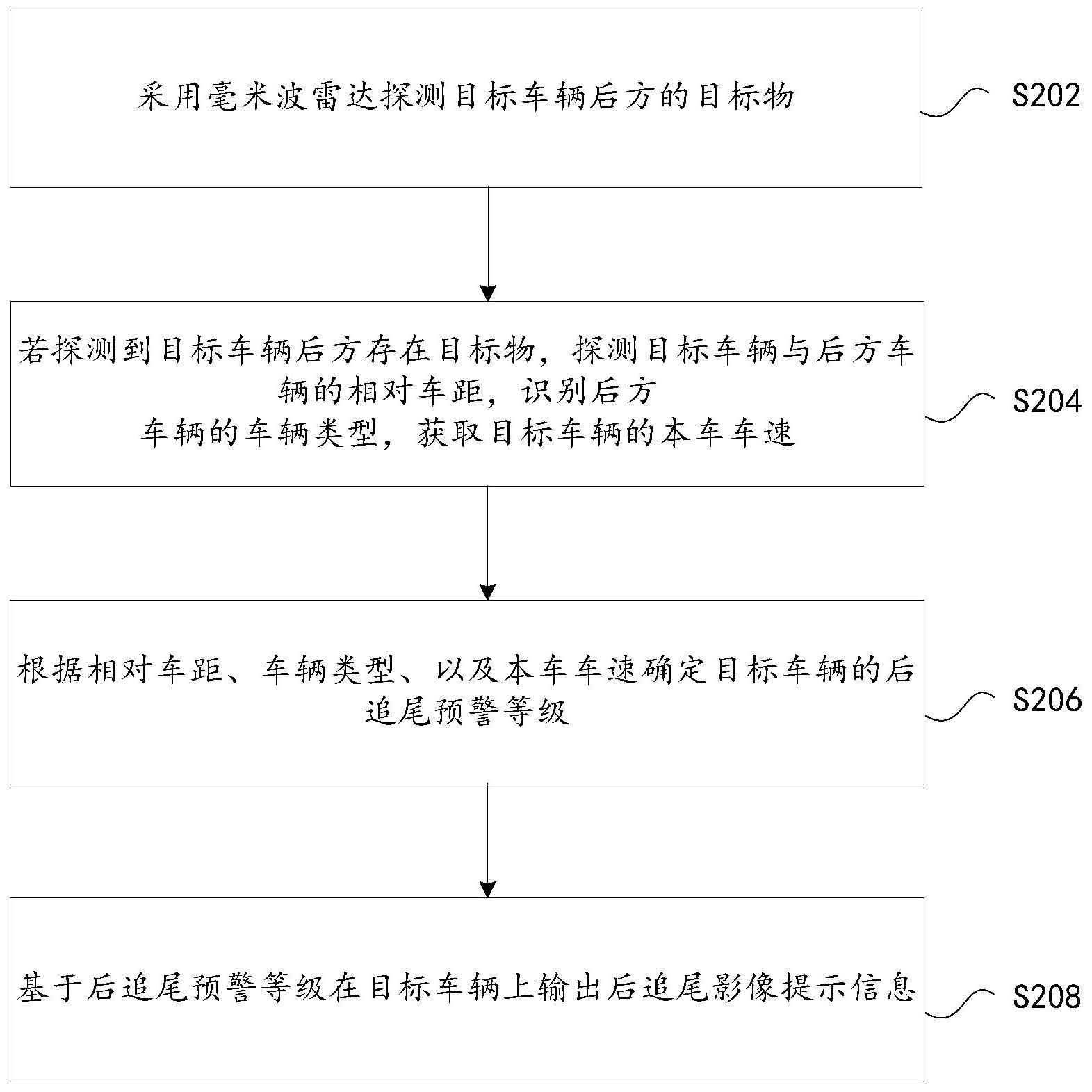
2、根据本发明的一个实施例,提供了一种后追尾预警的提示方法,包括:采用毫米波雷达探测目标车辆后方的目标物;若探测到目标车辆后方存在目标物,探测所述目标车辆与后方车辆的相对车距,识别所述后方车辆的车辆类型,获取所述目标车辆的本车车速;根据所述相对车距、所述车辆类型、以及所述本车车速确定所述目标车辆的后追尾预警等级;基于所述后追尾预警等级在所述目标车辆上输出后追尾影像提示信息。
3、进一步,根据所述相对车距、所述车辆类型、以及所述本车车速确定所述目标车辆的后追尾预警等级包括:根据所述相对车距计算所述目标车辆与所述后方车辆的碰撞发生时间ttc;根据所述车辆类型和所述本车车速匹配所述目标车辆的第一预设阈值;判断所述ttc是否小于第一预设阈值;若所述ttc小于第一预设阈值,确定所述目标车辆的后追尾预警等级为第一等级;判断所述ttc是否小于第二预设阈值,其中,所述第二预设阈值小于所述第一预设阈值;若所述ttc小于第二预设阈值,确定所述目标车辆的后追尾预警等级为第二等级,其中,所述第二等级高于所述第一等级。
4、进一步,根据所述车辆类型匹配所述目标车辆的第一预设阈值包括:解析所述后方车辆的车辆类型,其中,所述车辆类型包括货车和非货车;若所述后方车辆为货车,将第一门限值匹配为所述目标车辆的第一预设阈值;若所述后方车辆为非货车,将第二门限值匹配为所述目标车辆的第一预设阈值,其中,所述第一门限值大于所述第二门限值,所述第一预设阈值包括所述第一门限值和所述第二门限值。
5、进一步,根据所述本车车速匹配所述目标车辆的第一预设阈值包括:判断所述目标车辆的本车速度是否大于预设速度;若所述本车速度大于预设速度,将第三门限值匹配为所述目标车辆的第一预设阈值;若所述本车速度小于或等于预设速度,将第四门限值匹配为所述目标车辆的第一预设阈值,其中,所述第三门限值大于所述第四门限值,所述第一预设阈值包括所述第三门限值和所述第四门限值。
6、进一步,根据所述相对车距计算所述目标车辆与所述后方车辆的ttc包括:采用毫米波雷达探测所述后方车辆的行车速度,以及获取所述目标车辆的本车速度;基于所述行车速度和所述本车速度计算所述目标车辆与所述后方车辆的相对速度;基于所述相对车距和所述相对速度计算所述目标车辆与所述后方车辆的ttc。
7、进一步,基于所述后追尾预警等级在所述目标车辆上输出后追尾影像提示信息包括:获取车尾摄像头采集的车后影像;若所述预警等级为第一等级,在所述目标车辆的仪表盘上输出第一提示内容,并显示所述车后影像;若所述预警等级为第二等级,在所述目标车辆的仪表盘上输出第二提示内容,并高亮闪烁显示所述车后影像,驱动蜂鸣器报警,其中,所述第二提示内容的预警级别高于所述第一提示内容。
8、进一步,若所述预警等级为第二等级,所述方法还包括:驱动所述目标车辆的尾灯按照预设周期闪烁,以及驱动安全带控制器缩紧所述目标车辆的安全带。
9、根据本发明的另一个实施例,提供了一种后追尾预警的提示装置,包括:第一探测模块,用于采用毫米波雷达探测目标车辆后方的目标物;第二探测模块,用于若探测到目标车辆后方存在目标物,探测所述目标车辆与后方车辆的相对车距,识别所述后方车辆的车辆类型,获取所述目标车辆的本车车速;确定模块,用于根据所述相对车距、所述车辆类型、以及所述本车车速确定所述目标车辆的后追尾预警等级;提示模块,用于基于所述后追尾预警等级在所述目标车辆上输出后追尾影像提示信息。
10、进一步,所述确定模块包括:计算单元,用于根据所述相对车距计算所述目标车辆与所述后方车辆的碰撞发生时间ttc;匹配单元,用于根据所述车辆类型和所述本车车速匹配所述目标车辆的第一预设阈值;第一判断单元,用于判断所述ttc是否小于第一预设阈值;第一确定单元,用于若所述ttc小于第一预设阈值,确定所述目标车辆的后追尾预警等级为第一等级;第二判断单元,用于判断所述ttc是否小于第二预设阈值,其中,所述第二预设阈值小于所述第一预设阈值;第二确定单元,用于若所述ttc小于第二预设阈值,确定所述目标车辆的后追尾预警等级为第二等级,其中,所述第二等级高于所述第一等级。
11、进一步,所述匹配单元包括:解析子单元,用于解析所述后方车辆的车辆类型,其中,所述车辆类型包括货车和非货车;第一匹配子单元,用于若所述后方车辆为货车,将第一门限值匹配为所述目标车辆的第一预设阈值;若所述后方车辆为非货车,将第二门限值匹配为所述目标车辆的第一预设阈值,其中,所述第一门限值大于所述第二门限值,所述第一预设阈值包括所述第一门限值和所述第二门限值。
12、进一步,所述匹配单元包括:判断子单元,用于判断所述目标车辆的本车速度是否大于预设速度;第二匹配子单元,用于若所述本车速度大于预设速度,将第三门限值匹配为所述目标车辆的第一预设阈值;若所述本车速度小于或等于预设速度,将第四门限值匹配为所述目标车辆的第一预设阈值,其中,所述第三门限值大于所述第四门限值,所述第一预设阈值包括所述第三门限值和所述第四门限值。
13、进一步,所述计算单元包括:处理单元,用于采用毫米波雷达探测所述后方车辆的行车速度,以及获取所述目标车辆的本车速度;第一计算单元,用于基于所述行车速度和所述本车速度计算所述目标车辆与所述后方车辆的相对速度;第二计算单元,用于基于所述相对车距和所述相对速度计算所述目标车辆与所述后方车辆的ttc。
14、进一步,所述提示模块包括:获取单元,用于获取车尾摄像头采集的车后影像;第一提示单元,用于若所述预警等级为第一等级,在所述目标车辆的仪表盘上输出第一提示内容,并显示所述车后影像;第二提示单元,用于若所述预警等级为第二等级,在所述目标车辆的仪表盘上输出第二提示内容,并高亮闪烁显示所述车后影像,驱动蜂鸣器报警,其中,所述第二提示内容的预警级别高于所述第一提示内容。
15、进一步,所述装置还包括:处理单元,用于若所述预警等级为第二等级,驱动所述目标车辆的尾灯按照预设周期闪烁,以及驱动安全带控制器缩紧所述目标车辆的安全带。
16、根据本技术实施例的另一方面,还提供了一种存储介质,该存储介质包括存储的程序,程序运行时执行上述的步骤。
17、根据本技术实施例的另一方面,还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;其中:存储器,用于存放计算机程序;处理器,用于通过运行存储器上所存放的程序来执行上述方法中的步骤。
18、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述方法中的步骤。
19、本发明的有益效果:
20、1、本发明基于后追尾预警等级在目标车辆上输出后追尾影像提示信息,通过显示后方的目标物影像,避免或减轻本车车辆在后方会遇到的碰撞风险,同时提醒驾驶员迅速驶离,减少因后方车辆追尾而引起的交通事故发生,实现针对车辆后追尾的安全保护;
21、2、本发明根据相对车距、车辆类型、以及本车车速确定目标车辆的后追尾预警等级,提高了车辆后追尾预警等级提示的准确度,增强了驾乘人员在行驶时的后方安全性,同时避免了后追尾预警对车辆正常行驶的干扰。
- 还没有人留言评论。精彩留言会获得点赞!