一种多功能跨介质变体飞行器
本发明属于水空两栖飞行,具体涉及一种多功能跨介质变体飞行器。
背景技术:
1、跨介质飞行器是可广泛用于各类需要跨介质飞行的未来新型飞行器,同时具备不同介质中航行的作业能力,应用前景十分广阔。以在水和空气中航行为例,该种飞行器可以实现自主出水、入水,以实现水-空及空-水过渡,扩展了飞行器的工作区域,优化了飞行器的工作性能。
2、但是现有的跨介质飞行器大多通过动力装置自主出水,在跨越介质时,由于质量附加效应,以及流场和扰动的复杂性,增大了飞行器出水的控制难度;在构型上,大多数跨介质飞行器采用多旋翼构型,或者倾转旋翼构型,在水中阻力较大,速度上限很低,并且倾转旋翼故障率较高,不利于长期工作;在工作模式上,现有的跨介质固定翼飞行器通常只有一种飞行模式,即巡航,难以完成定点或定区域监测,通用性不强。
技术实现思路
1、本发明为了解决目前的跨介质飞行器跨介质时控制难度大,多旋翼跨介质飞行器飞行速度低,固定翼跨介质飞行器工作模式单一的问题。
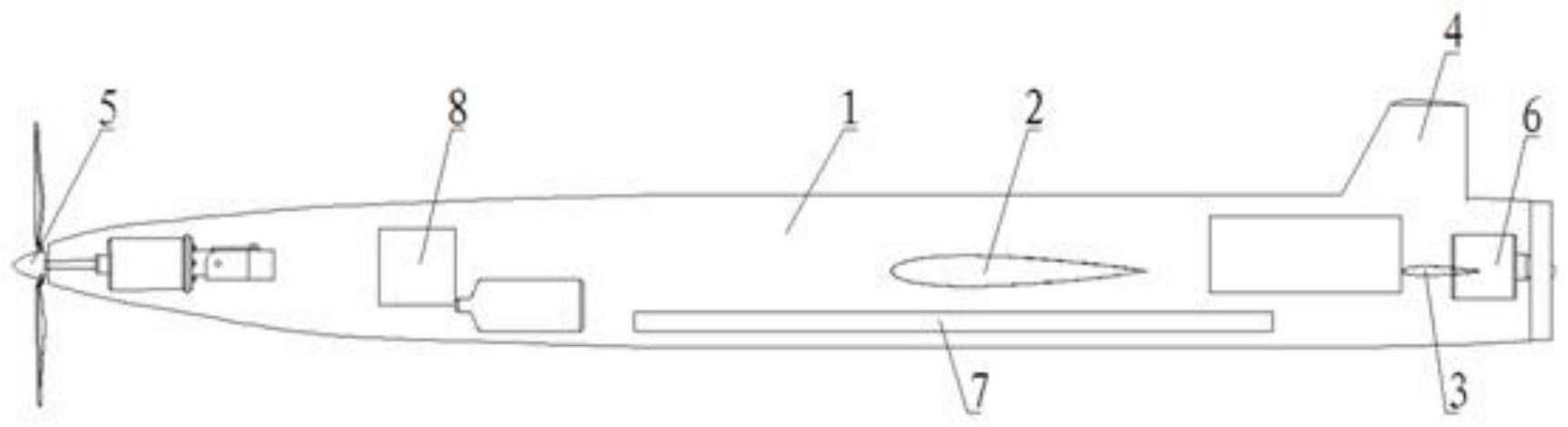
2、本发明提供了如下技术方案:一种多功能跨介质变体飞行器,包括机体、变体机翼、水平尾翼和垂直尾翼;变体机翼安装在机体中段两侧、水平尾翼安装在机体尾段两侧、垂直尾翼位于两个水平尾翼中间的机体顶部,机体、变体机翼、水平尾翼以及垂直尾翼组成的结构对称;机体的头部有空中飞行动力单元、尾部有水下推进单元,机体中段的腹部设有前后重心调整机构;变体机翼可折叠,内部是充气腔体,机体内设有用于给变体机翼充放气的充放气单元;
3、跨介质变体飞行器包括以下飞行状态;
4、水入空状态:变体机翼由折叠状调整至展开状,同时内部充气,跨介质变体飞行器自主上浮,前后重心调整机构将机体重心后移,机体由水平态调整至倾斜态,空中飞行动力单元出水后工作,跨介质变体飞行器离水后水下推进单元停机,跨介质变体飞行器保持竖直爬升或由前后重心调整机构将机体重心前移,跨介质变体飞行器调整飞行姿态;
5、空入水状态:变体机翼由展开状调整至折叠状,同时内部放气,跨介质变体飞行器自主下潜,空中飞行动力单元停机,水下推进单元工作。
6、进一步地,变体机翼的展开形状是梯形翼、矩形翼、三角翼或椭圆翼。
7、进一步地,空中飞行动力单元包括航空螺旋桨和第一电机,水下推进单元包括水用螺旋桨和第二电机,第一电机和第二电机由机体内的蓄电池供电。
8、进一步地,第一电机通过电机座与机体相连,电机座包括相铰接的固定座体和活动座体,固定座体安装在机体上,第一电机安装在活动座体上;固定座体上在活动座体摆动方向前设有可启闭的限位杆,限位杆由固定座体上的舵机驱动。
9、进一步地,航空螺旋桨的叶片与中间的连接部铰接,铰接轴与航空螺旋桨的驱动轴垂直,叶片向机体自由摆动,反方向叶片与驱动轴呈90°夹角处设有限位。
10、进一步地,变体机翼的展开形状是梯形翼,变体机翼包括内部折叠骨架和外部可压缩蒙皮;内部折叠骨架沿翼展方向断开为折叠骨架固定部和折叠骨架活动部,折叠骨架固定部可容纳折叠骨架活动部,折叠骨架活动部与折叠骨架固定部滑动相接,折叠骨架活动部和折叠骨架固定部之间连接有两组拉伸机构,第一拉伸机构的拉绳一端连接折叠骨架活动部、另一端连接在折叠骨架固定部上的卷扬机上,第二拉伸机构的拉绳绕过折叠骨架固定部上的定滑轮,一端连接折叠骨架活动部、另一端连接在折叠骨架固定部上的卷扬机上,两个卷扬机位于折叠骨架固定部连接机体的一侧,定滑轮位于折叠骨架固定部远离机体的一侧,两组拉伸机构施予折叠骨架活动部反向的拉力,使折叠骨架活动部从折叠骨架固定部中抽出或缩回,并维持二者的相对位置。
11、进一步地,折叠骨架固定部包括前部导轨、后部导轨、加强前缘条、固定部翼肋和限位挡板,固定部翼肋、限位挡板和加强前缘条保持折叠骨架固定部外形,固定部翼肋中间开有容许折叠骨架活动部进出的缺口,前部导轨和后部导轨位于折叠骨架活动部两侧;
12、折叠骨架活动部包括加强杆、活动部翼肋,数个活动部翼肋从机体侧向变体机翼末端尺寸依次减小,活动部翼肋之间通过加强杆连接,最大的活动部翼肋与前部导轨和后部导轨滑动相接。
13、与现有技术相比,本发明的优势在于:
14、1.本发明的一种多功能跨介质变体飞行器头部装有电机转动-锁死机构,在飞行器完成起飞前准备动作后,机构解锁,电机绕俯仰轴向上转动,带动螺旋桨转动,由于重力作用,飞行器姿态向垂直方向转变,至某一高度后悬停,开始工作,相比于跨介质固定翼飞行器增加了工作模式,显著增强了跨介质飞行器的通用性。
15、2.本发明的一种多功能跨介质变体飞行器采用折叠机翼,通过驱动机翼内部的折叠机构展开机翼,并由充气装置维持机翼外形,同时改变了飞行器体积,以自主上浮的方式实现水-空跨介质过程,相比于直接出水的跨介质飞行器具有控制难度小、可靠性高的优点。
16、3.本发明的一种多功能跨介质变体飞行器内置重心调整机构,当飞行器自主上浮至水面时,重心调整机构工作,增大仰角,调整姿态,直至飞行器头部出水,完成起飞前准备动作,相比于直接出水的跨介质飞行器增加了姿态调整过程,降低了控制难度,增强了飞行器出水的姿态稳定性,更有利于实现水-空跨介质机动。
17、4.本发明的一种多功能跨介质变体飞行器采用固定翼构型,相比于旋翼机,在空中飞行阶段具有较高的速度,任务执行力强、工作效率高,且在水中航行时可以收回机翼,减小阻力,提高航速。
技术特征:
1.一种多功能跨介质变体飞行器,其特征在于:包括机体(1)、变体机翼(2)、水平尾翼(3)和垂直尾翼(4);变体机翼(2)安装在机体(1)中段两侧、水平尾翼(3)安装在机体(1)尾段两侧、垂直尾翼(4)位于两个水平尾翼(3)中间的机体(1)顶部,机体(1)、变体机翼(2)、水平尾翼(3)以及垂直尾翼(4)组成的结构对称;机体(1)的头部有空中飞行动力单元(5)、尾部有水下推进单元(6),机体(1)中段的腹部设有前后重心调整机构(7);变体机翼(2)可折叠,内部是充气腔体,机体(1)内设有用于给变体机翼(2)充放气的充放气单元(8);
2.根据权利要求1所述的一种多功能跨介质变体飞行器,其特征在于:所述的变体机翼(2)的展开形状是梯形翼、矩形翼、三角翼或椭圆翼。
3.根据权利要求2所述的一种多功能跨介质变体飞行器,其特征在于:所述的空中飞行动力单元(5)包括航空螺旋桨和第一电机(9),水下推进单元(6)包括水用螺旋桨和第二电机,第一电机和第二电机由机体(1)内的蓄电池供电。
4.根据权利要求3所述的一种多功能跨介质变体飞行器,其特征在于:所述的第一电机(9)通过电机座(10)与机体(1)相连,电机座(10)包括相铰接的固定座体和活动座体,固定座体安装在机体(1)上,第一电机(9)安装在活动座体上;固定座体上在活动座体摆动方向前设有可启闭的限位杆(12),限位杆(12)由固定座体上的舵机(11)驱动。
5.根据权利要求4所述的一种多功能跨介质变体飞行器,其特征在于:所述的航空螺旋桨的叶片与中间的连接部铰接,铰接轴与航空螺旋桨的驱动轴垂直,叶片向机体(1)自由摆动,反方向叶片与驱动轴呈90°夹角处设有限位。
6.根据权利要求2所述的一种多功能跨介质变体飞行器,其特征在于:所述的变体机翼(2)的展开形状是梯形翼,变体机翼(2)包括内部折叠骨架和外部可压缩蒙皮;内部折叠骨架沿翼展方向断开为折叠骨架固定部(2.1)和折叠骨架活动部(2.2),折叠骨架固定部(2.2)可容纳折叠骨架活动部(2.2),折叠骨架活动部(2.2)与折叠骨架固定部(2.1)滑动相接,折叠骨架活动部(2.2)和折叠骨架固定部(2.1)之间连接有两组拉伸机构,第一拉伸机构(13)的拉绳一端连接折叠骨架活动部(2.2)、另一端连接在折叠骨架固定部(2.1)上的卷扬机上,第二拉伸机构(14)的拉绳绕过折叠骨架固定部(2.1)上的定滑轮(15),一端连接折叠骨架活动部(2.2)、另一端连接在折叠骨架固定部(2.2)上的卷扬机上,两个卷扬机位于折叠骨架固定部(2.1)连接机体(1)的一侧,定滑轮(15)位于折叠骨架固定部(2.1)远离机体(1)的一侧,两组拉伸机构施予折叠骨架活动部(2.2)反向的拉力,使折叠骨架活动部(2.2)从折叠骨架固定部(2.1)中抽出或缩回,并维持二者的相对位置。
7.根据权利要求6所述的一种多功能跨介质变体飞行器,其特征在于:所述的折叠骨架固定部(2.1)包括前部导轨(2.1.1)、后部导轨(2.1.2)、加强前缘条(2.1.3)、固定部翼肋(2.1.4)和限位挡板(2.1.5),固定部翼肋(2.1.4)、限位挡板(2.1.5)和加强前缘条(2.1.3)保持折叠骨架固定部(2.1)外形,固定部翼肋(2.1.4)中间开有容许折叠骨架活动部(2.2)进出的缺口,前部导轨(2.1.1)和后部导轨(2.1.2)位于折叠骨架活动部(2.2)两侧;
技术总结
本发明属于水空两栖飞行技术领域,具体涉及一种多功能跨介质变体飞行器;包括机体、变体机翼、水平尾翼和垂直尾翼;变体机翼安装在机体中段两侧、水平尾翼安装在机体尾段两侧、垂直尾翼位于两个水平尾翼中间的机体顶部,机体、变体机翼、水平尾翼以及垂直尾翼组成的结构对称;机体的头部有空中飞行动力单元、尾部有水下推进单元,机体中段的腹部设有前后重心调整机构;变体机翼可折叠,内部是充气腔体,机体内设有用于给变体机翼充放气的充放气单元;本发明的一种多功能跨介质变体飞行器采用固定翼构型,相比于旋翼机,在空中飞行阶段具有较高的速度,任务执行力强、工作效率高,且在水中航行时可以收回机翼,减小阻力,提高航速。
技术研发人员:王根伟,黄海峰,何胤达
受保护的技术使用者:太原理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!