电动牵引车驾驶员离位自动下电方法、装置、系统及设备与流程
本发明属于电动牵引车控制,具体涉及一种电动牵引车驾驶员离位自动下电方法、装置、系统及设备。
背景技术:
1、随着科技越来越发达,电动化设备已开始大量应用于人们的日常生活及生产之中。例如由电机带动的电动牵引车,常用于车间内外的大批量货物运输、流水线上的物料搬运以及大型工厂区间的物料搬运(具体运输/搬运方式为:货物/物料往往存放在挂车中,然后通过电动牵引车来解决不同区间物料的高效运输;电动牵引车的额定牵引载重从1000kg-6000kg不等)。
2、目前,电动牵引车已广泛应用于机场和物流仓储等作业场景,其运行安全问题尤为重要。在实际的牵引车工作运行过程中,经常发生驾驶员离开驾驶位,而忘记操作整车高压电驱系统下电,从而存在一定的高压安全隐患,可能会造成安全事故,并且此时由于车辆电驱系统处于高压上电状态,也会造成一定的不必要能量损耗,降低车辆作业效率。因此如何监测发现电动牵引车驾驶员离位情况并在离位时进行自动下电/和驻车,是本领域技术人员亟需研究的课题。
技术实现思路
1、本发明的目的是提供一种电动牵引车驾驶员离位自动下电方法、装置、系统、计算机设备及计算机可读存储介质,用以实时监测电动牵引车驾驶员离位情况,并在发现离位时通过自动下电/和驻车来避免因误操作而引起的安全事故以及减少不必要能量损耗,实现保障行车安全和提升车辆作业效率的目的。
2、为了实现上述目的,本发明采用以下技术方案:
3、第一方面,提供了一种电动牵引车驾驶员离位自动下电方法,由电动牵引车的且分别通信连接驾驶员在位监测设备、车辆电驱系统和电子驻车制动系统的整车控制器在所述车辆电驱系统处于上电状态时执行,包括:
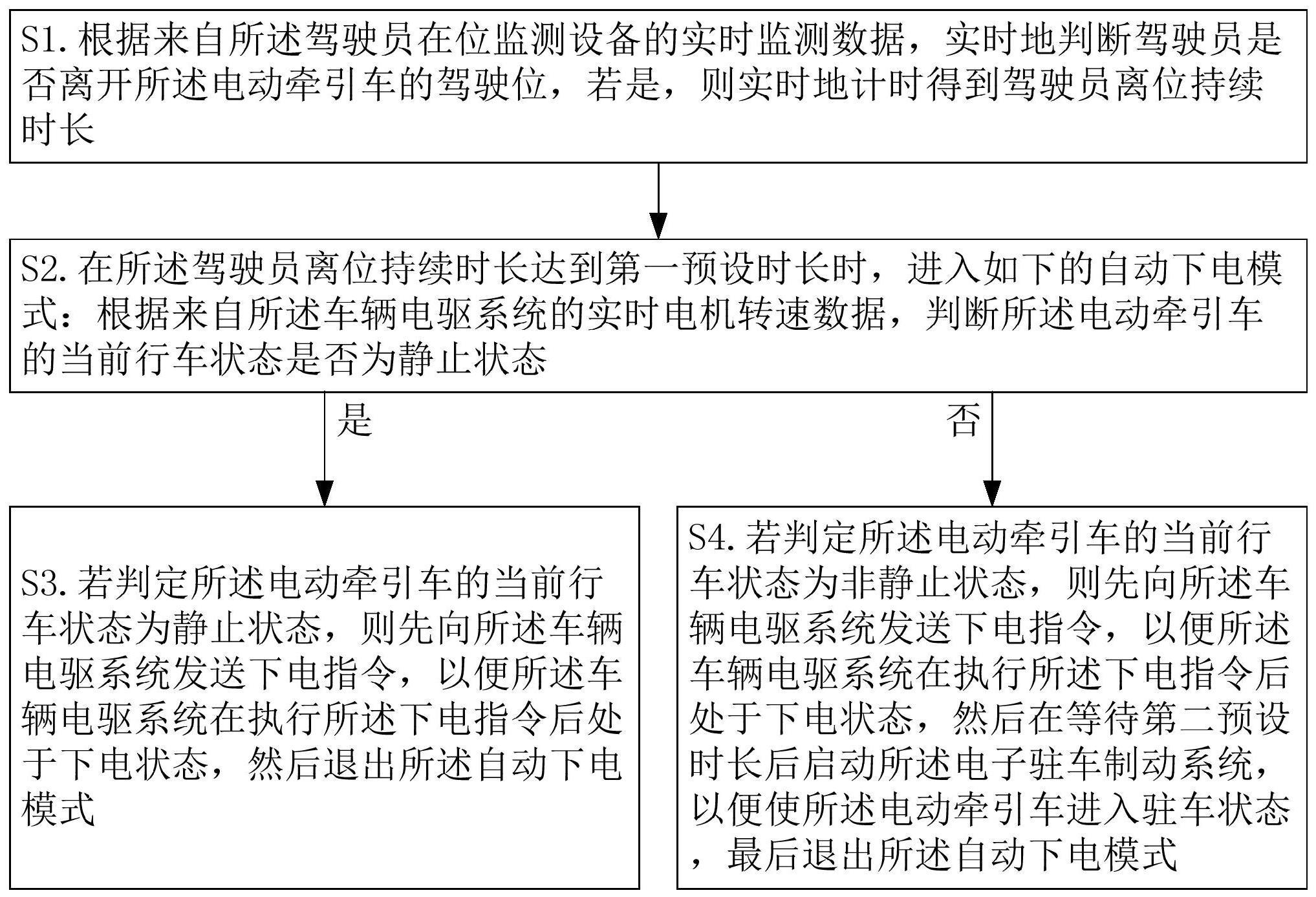
4、根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,若是,则实时地计时得到驾驶员离位持续时长,其中,所述驾驶员在位监测设备部署在所述电动牵引车上;
5、在所述驾驶员离位持续时长达到第一预设时长时,进入如下的自动下电模式:根据来自所述车辆电驱系统的实时电机转速数据,判断所述电动牵引车的当前行车状态是否为静止状态,其中,所述车辆电驱系统也部署在所述电动牵引车上;
6、若判定所述电动牵引车的当前行车状态为静止状态,则先向所述车辆电驱系统发送下电指令,以便所述车辆电驱系统在执行所述下电指令后处于下电状态,然后退出所述自动下电模式;
7、若判定所述电动牵引车的当前行车状态为非静止状态,则先向所述车辆电驱系统发送下电指令,以便所述车辆电驱系统在执行所述下电指令后处于下电状态,然后在等待第二预设时长后启动所述电子驻车制动系统,以便使所述电动牵引车进入驻车状态,最后退出所述自动下电模式,其中,所述电子驻车制动系统也部署在所述电动牵引车上。
8、基于上述
技术实现要素:
,提供了一种基于不同行车状态对电动牵引车采取相应自动下电/和驻车操作的电动牵引车驾驶员离位控制新方案,即先根据来自驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开驾驶位,若是,则实时地计时得到驾驶员离位持续时长,然后在驾驶员离位持续时长达到预设时长时,根据来自车辆电驱系统的实时电机转速数据,判断当前行车状态是否为静止状态,若是则直接进行下电操作,否则先进行下电操作,再等待一段时间进行驻车操作,如此可以实时监测电动牵引车驾驶员离位情况,并在发现离位时通过自动下电/和驻车来避免因误操作而引起的安全事故以及减少不必要能量损耗,实现保障行车安全和提升车辆作业效率的目的,便于实际应用和推广。
9、在一个可能的设计中,当所述整车控制器还通信连接声光报警系统时,所述方法还包括:
10、在进入所述自动下电模式时,启动所述声光报警系统进行声光报警,其中,所述声光报警系统也部署在所述电动牵引车上;
11、在退出所述自动下电模式时,关闭所述声光报警系统,停止声光报警。
12、在一个可能的设计中,当所述整车控制器还通信连接自动下电启停开关时,根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,包括:在检测发现所述自动下电启停开关的当前启停状态为开启状态时,根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,其中,所述自动下电启停开关部署在所述电动牵引车上;
13、和/或,当所述电动牵引车配置有手动驾驶模式和非手动驾驶模式时,根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,包括:在检测发现所述电动牵引车的当前驾驶模式为手动驾驶模式时,根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位。
14、在一个可能的设计中,在所述驾驶员离位持续时长达到所述第一预设时长前,所述方法还包括:在检测到发生人为主动性输入操作事件时,先将所述驾驶员离位持续时长清零,然后重新根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,其中,所述人为主动性输入操作事件是指有人对所述电动牵引车做出踩下制动/加速踏板或启动手刹的事件;
15、和/或,在进入所述自动下电模式后且退出所述自动下电模式前,所述方法还包括:在检测到发生人为主动性输入操作事件时,先退出所述自动下电模式,然后将所述驾驶员离位持续时长清零,最后重新根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,其中,所述人为主动性输入操作事件是指有人对所述电动牵引车做出踩下制动/加速踏板或启动手刹的事件。
16、在一个可能的设计中,当电机转速数据包含有电机转速绝对值时,根据来自所述车辆电驱系统的实时电机转速数据,判断所述电动牵引车的当前行车状态是否为静止状态,包括:
17、根据来自所述车辆电驱系统的且实时上传的电机转速绝对值,若该电机转速绝对值小于等于10转每分钟,则判定所述电动牵引车的当前行车状态为静止状态,否则判定所述电动牵引车的当前行车状态为非静止状态。
18、在一个可能的设计中,所述驾驶员在位监测设备采用压力传感器、摄像头和/或红外探头,其中,所述压力传感器部署在所述电动牵引车的驾驶座椅中,所述摄像头的视野范围涵盖所述电动牵引车的驾驶座椅,所述红外探头的探测范围涵盖所述电动牵引车的驾驶座椅。
19、第二方面,提供了一种电动牵引车驾驶员离位自动下电装置,适用于布置在电动牵引车的且分别通信连接驾驶员在位监测设备、车辆电驱系统和电子驻车制动系统的整车控制器中,包括有驾驶员离位判断单元、自动下电模式启动单元、下电操作单元和下电驻车操作单元;
20、所述驾驶员离位判断单元,用于在所述车辆电驱系统处于上电状态时,根据来自所述驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开所述电动牵引车的驾驶位,若是,则实时地计时得到驾驶员离位持续时长,其中,所述驾驶员在位监测设备部署在所述电动牵引车上;
21、所述自动下电模式启动单元,通信连接所述驾驶员离位判断单元,用于在所述驾驶员离位持续时长达到第一预设时长时,进入如下的自动下电模式:根据来自所述车辆电驱系统的实时电机转速数据,判断所述电动牵引车的当前行车状态是否为静止状态,其中,所述车辆电驱系统也部署在所述电动牵引车上;
22、所述下电操作单元,通信连接所述自动下电模式启动单元,用于在判定所述电动牵引车的当前行车状态为静止状态时,先向所述车辆电驱系统发送下电指令,以便所述车辆电驱系统在执行所述下电指令后处于下电状态,然后退出所述自动下电模式;
23、所述下电驻车操作单元,通信连接所述自动下电模式启动单元,用于在判定所述电动牵引车的当前行车状态为非静止状态时,先向所述车辆电驱系统发送下电指令,以便所述车辆电驱系统在执行所述下电指令后处于下电状态,然后在等待第二预设时长后启动所述电子驻车制动系统,以便使所述电动牵引车进入驻车状态,最后退出所述自动下电模式,其中,所述电子驻车制动系统也部署在所述电动牵引车上。
24、第三方面,本发明提供了一种电动牵引车驾驶员离位自动下电系统,包括有驾驶员在位监测设备、车辆电驱系统、电子驻车制动系统和整车控制器,其中,所述驾驶员在位监测设备、所述车辆电驱系统、所述电子驻车制动系统和所述整车控制器分别部署在电动牵引车上;
25、所述整车控制器,分别通信连接所述驾驶员在位监测设备、所述车辆电驱系统和所述电子驻车制动系统,用于执行如第一方面或第一方面中任意可能设计所述的电动牵引车驾驶员离位自动下电方法。
26、第四方面,本发明提供了一种控制设备,包括有依次通信连接的存储器、处理器和收发器,其中,所述存储器用于存储计算机程序,所述收发器用于收发消息,所述处理器用于读取所述计算机程序,执行如第一方面或第一方面中任意可能设计所述的电动牵引车驾驶员离位自动下电方法。
27、第五方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有指令,当所述指令在计算机上运行时,执行如第一方面或第一方面中任意可能设计所述的电动牵引车驾驶员离位自动下电方法。
28、第六方面,本发明提供了一种包含指令的计算机程序产品,当所述指令在计算机上运行时,使所述计算机执行如第一方面或第一方面中任意可能设计所述的电动牵引车驾驶员离位自动下电方法。
29、上述方案的有益效果:
30、(1)本发明创造性提供了一种基于不同行车状态对电动牵引车采取相应自动下电/和驻车操作的电动牵引车驾驶员离位控制新方案,即先根据来自驾驶员在位监测设备的实时监测数据,实时地判断驾驶员是否离开驾驶位,若是,则实时地计时得到驾驶员离位持续时长,然后在驾驶员离位持续时长达到预设时长时,根据来自车辆电驱系统的实时电机转速数据,判断当前行车状态是否为静止状态,若是则直接进行下电操作,否则先进行下电操作,再等待一段时间进行驻车操作,如此可以实时监测电动牵引车驾驶员离位情况,并在发现离位时通过自动下电/和驻车来避免因误操作而引起的安全事故以及减少不必要能量损耗,实现保障行车安全和提升车辆作业效率的目的,便于实际应用和推广;
31、(2)由于在车辆处于非静止状态时是先进行下电操作再等待一段时间进行驻车操作,可使得电动牵引车能够在减速到一定程度后进行安全驻车,以便减少因驻车而对车辆传动系统造成损害;
32、(3)本方案只需在驾驶座椅中添加压力传感器,无需增加其他设备,可以在实现上述功能的前提下,成本增加较少;
33、(4)在检测过程中可避免出现因驾驶员调整坐姿或在驾驶中短时离开座位等情景而误触发自动下电的情况,使得更贴合实际应用场景;
34、(5)通过增加声光报警系统,可有效及时地提醒驾驶员及相关人员关注车辆所处状态,便于人员进行相应操作。
35、(6)通过增加自动下电启停开关,可以方便进行微动调整等需驾驶员较长时间离开驾驶位,而电驱系统需处于高压上电状态的操作。
- 还没有人留言评论。精彩留言会获得点赞!