一种商用车线控冗余制动系统及其控制方法与流程
本发明涉及线控制动系统领域,具体而言,涉及一种适用于无人驾驶矿用自卸车且具有线控冗余备份功能的商用车线控制动系统。
背景技术:
1、运输车辆的无人驾驶操作是智能化进程中的全新领域,更多精细化功能的实现依赖于特定的底盘基础部件。到目前为止,无人驾驶矿用自卸车仍然保留了人工驾驶员或“安全员”,以便监控车辆状态并在必要时接管和操纵车辆。然而随着自动驾驶技术的不断发展,某些露天矿区的自动驾驶系统已经开始取消安全员或称“安全员下车”,以降低矿区作业人力成本。在没有驾驶员监控的情况下,矿用自卸车线控系统的高度可靠是保障车辆无人驾驶行驶安全的必要前提。其中,制动系统和转向系统的安全性和可靠性尤为重要。对于制动系统,取消安全员意味着车辆不再有人力备份制动,如要实现“安全员下车”功能就要求线控制动系统必须有线控冗余备份功能。
2、具体而言,目前矿用自卸车大多使用电-气动式制动系统。正常情况下自动驾驶系统及线控制动系统皆工作于电控模式。在线控制动的电子控制装置或自动驾驶系统发生故障的情况下,安全员仍然可以通过脚来控制制动系统的气动部分以实现前述所谓“人力备份制动”。然而,在“安全员下车”的无人驾驶情况下,上述线控制动系统的电子控制装置或自动驾驶系统一旦发生故障将没有手段来取代驾驶员的制动控制。
3、中国专利公开号cn211452861u《一种用于汽车双效制动机器人》提出了一种采用急停机器人模拟驾驶员的动作实施制动控制的方案。它主要用于无人驾驶测试车辆的急停控制,即当车辆无人驾驶系统出现异常时发送异常信号,急停机器人会立即响应并代替安全员踩下制动踏板,以达到刹停车辆、保证行驶安全的目的。
4、急停机器人模拟驾驶员实施制动控制的方式主要存在以下几点不足:(1)该急停机器人结构笨重,且在有限的主驾驶座位置占用了很大空间,不利于驾驶员对制动踏板的操纵因而在人工驾驶模式下存在制动安全隐患;(2)该结构在车辆上安装不方便、易出错,适配性较差;(3)急停机器人需定期加注润滑脂并测试其功能是否正常,在频繁或者长期使用时还需避免电机温度过高;(4)该装置每次安装都需要重新标定机械位置、运动参数、can使能状态等,操作步骤繁琐、易出错。
5、中国专利公开号cn110667548a《线控制动系统冗余制动方法、系统及存储介质》提出了一种应用于冗余制动系统中的桥模块。该系统还包括主控模块、电源模块以及储气筒。其中,桥模块与主控模块分别与整车通信网络连接。桥模块通过can线与主控模块通信连接,主控模块和桥模块通过供电线路分别与电源模块连接。桥模块通过气源输入口与储气筒连接,通过气源输出端口与制动气室连接。在接收到整车通信网络发送的减速请求时,且主控模块处于失效状态,桥模块会基于接收到的减速请求确定制动压力值,并通过气源输出端口输出相应气压的气体至制动气室,进而对车辆施加该制动压力值。该专利冗余制动系统要求桥模块和整车通信,响应目标减速度请求,但是目前的桥模块直接采购供应商成熟产品,而供应商不开放控制单元接口,导致具体应用时适配性较低、功能很难实现。
技术实现思路
1、本发明旨在提出一种应用于无人驾驶矿用自卸车线控制动系统领域的冗余制动系统。目前,无人驾驶矿用自卸车现有制动系统不具备系统级冗余制动系统,在自动驾驶系统或原车线控制动系统失效的情况下,车辆则失去制动能力,会造成重大的人身财产损失。本发明中设计的线控冗余制动系统满足车辆线控冗余备份制动的需求,在主制动系统失效时,冗余制动系统建立制动压力,提供给整车制动力,以执行自动驾驶系统指令,从而保证车辆的线控冗余制动安全并满足自动驾驶系统失效时的自主紧急停车要求。
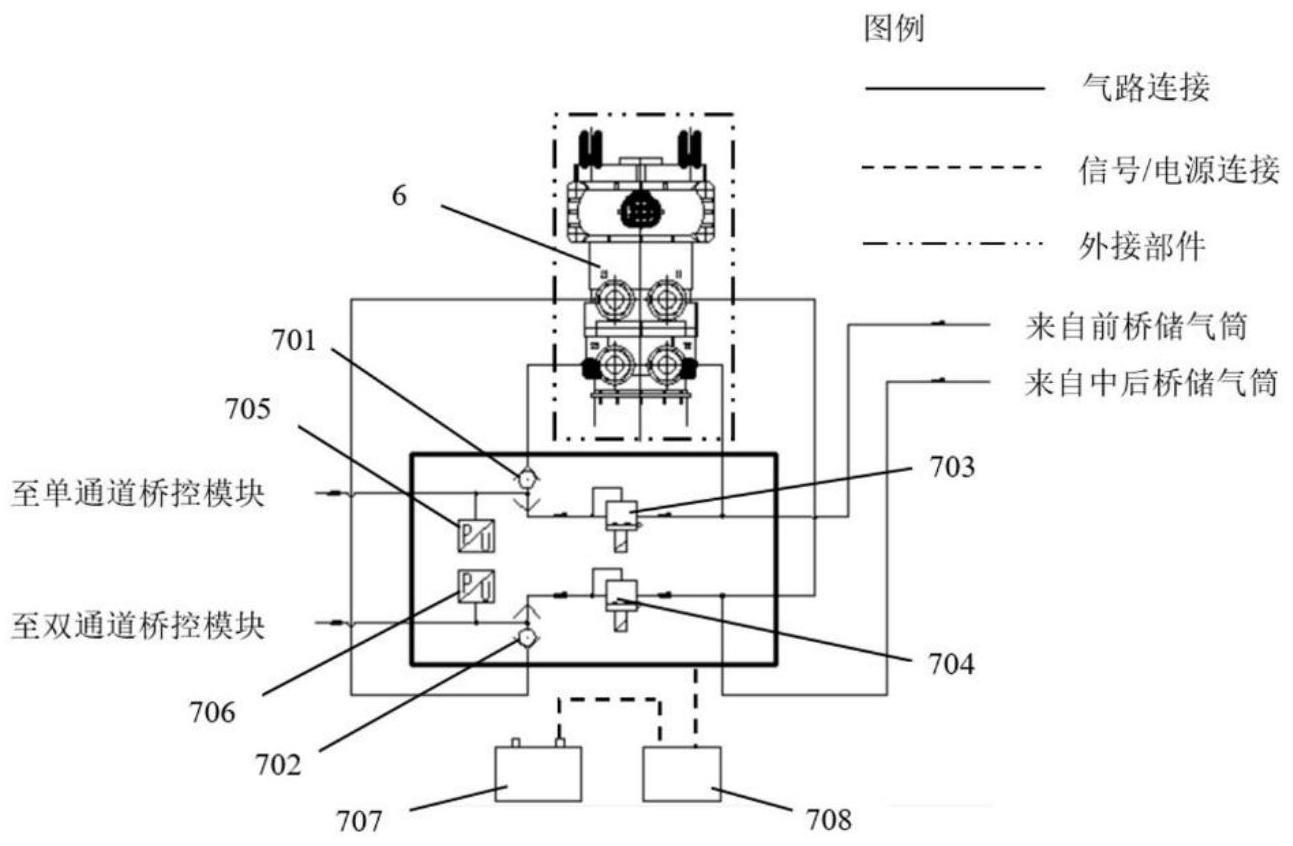
2、本发明提供一种带线控冗余功能的线控制动系统,通过线控冗余制动单元实现线控冗余制动功能;所述线控冗余制动单元包括比例阀总成、冗余制动控制器和独立电源:
3、比例阀总成:集成两个独立的电磁比例阀,分别为前桥回路和中后桥回路提供冗余制动压力输出;在两个电磁比例阀气压输出端分别安装一个梭阀和一个压力传感器,其中梭阀将电磁比例阀和常规制动阀同一制动回路中的机械阀输出压力较高者输出给对应回路的继动阀或比例继动阀,压力传感器实时监测两条回路输出压力并用于压力闭环控制;
4、冗余制动控制器:响应自动驾驶控制器的冗余制动指令并控制电磁比例阀开度,从而输出所需要的冗余制动压力,或在自动驾驶控制器故障时自主施加冗余制动;
5、独立电源:为比例阀总成和冗余制动控制器提供独立的24v直流电源。
6、进一步,所述线控制动系统还包括前桥储气筒、中后桥储气筒、驻车储气筒、电控制动总阀、自动驾驶主控制器、ebs中央控制器、单通道桥控模块、abs电磁阀、前桥制动气室、轮速传感器、双通道桥控模块、中桥制动气室、后桥制动气室、epb模块总成、epb开关;
7、比例阀总成两进气口分别连接至前桥储气筒和中后桥储气筒,电控制动总阀与比例阀总成并联,其两进气口分别连接至比例阀总成的两进气口;电控制动总阀的两个出气口分别连接至比例阀总成的两个梭阀的两端;比例阀总成上腔出气口连接至单通道桥控模块控制气口,下腔出气口连接至双通道桥控模块控制气口;单通道桥控模块两出气口分别连接至两abs电磁阀,abs电磁阀出气口连接至前桥制动气室;双通道桥控模块四个出气口分别连接至中桥制动气室和后桥制动气室;epb模块总成的进气口连接至驻车储气筒,两出气口分别连接至中桥制动气室和后桥制动气室;
8、单通道桥控模块和双通道桥控模块分别与中央控制器通过can进行通讯;中央控制器与abs电磁阀、电控制动总阀均有信号连接,轮速传感器电信号连接至单通道桥控模块、双通道桥控模块;比例阀总成控制单元与自动驾驶主控制器通过can进行通讯;比例阀总成的电信号连接至冗余制动控制器;epb开关电信号连接至epb模块总成。
9、本发明还提供一种带线控冗余功能的线控制动方法,采用上述线控制动系统进行线控制动,包括四种制动模式:
10、(1)线控制动:在无人驾驶模式正常情况下,单通道桥控模块和双通道桥控模块通过其内部备压阀切断备压信号,系统处于电控模式;当无人驾驶发送减速度指令给ebs中央控制器后,中央控制器结合其他传感器信号对其进行处理,得到制动压力需求,并控制单通道桥控模块、双通道桥控模块实现制动;
11、(2)人力制动:在人工驾驶模式下,单通道桥控模块和双通道桥控模块通过其内部备压阀切断备压信号,系统处于电控模式;当驾驶员踩下制动踏板后,电控制动总阀将内部制动行程信号发送给中央控制器,中央控制器再结合其他传感器信号进行处理,得到制动压力需求,并控制单通道桥控模块、双通道桥控模块实现制动;
12、(3)人力备份制动:在人工驾驶模式下,当制动系统电控模式出现问题时,自动进入气控模式,单通道桥控模块和双通道桥控模块的备压阀接通;当驾驶员踩下制动踏板后,电控制动总阀控制气路接通备压阀,控制单通道桥控模块、双通道桥控模块实现制动;
13、(4)线控冗余制动:当整车无人驾驶系统主控单元失效或者整车原有线控制动系统失效时,线控冗余制动单元自动被触发,线控冗余制动单元控制单通道桥控模块、双通道桥控模块实现制动。
14、进一步,所述线控冗余制动工作模式的实现方式如下:
15、车辆进行上电自检,初始化后,查看冗余制动控制器是否存在严重故障;若线控冗余制动单元存在严重故障,则对其进行关闭,并做诊断检查,排除故障;若系统无故障,如果车辆处于人工驾驶模式,系统则进入休眠状态;如果车辆处于无人驾驶模式,系统则进入待命状态;
16、在车辆行驶过程中,如果冗余制动控制器接收到主控单元发送的使能指令,则触发线控冗余制动单元;同时,冗余制动控制器和自动驾驶主控制器做心跳监测,若监测过程中出现连续丢失10帧及以上的现象,则触发线控冗余制动单元;否则不会触发,系统进行故障巡检;
17、线控冗余制动单元触发后,冗余制动控制器控制线控冗余制动单元通路开启,储气筒内压缩空气经线控冗余制动单元按照比例关系输出,分别到达单通道桥控模块、双通道桥控模块,继而进入前桥制动气室、中桥制动气室和后桥制动气室,控制车辆轮端实施制动。
18、本发明与现有技术相比所具有的有益效果:
19、1.本发明为无人驾驶车辆提供常规制动和线控冗余制动功能。
20、2.本发明设计的冗余制动系统是在整车原有线控制动及其人力备份制动的基础上,另外设计的一套线控冗余制动组件,形成多重制动冗余,从而提高了无人驾驶车辆的冗余安全性和制动可靠性。
21、3.本发明所提出的线控冗余制动单元(rbu)结构简单、不影响常规制动所有功能的实现,且rbu无需反复进行标定、调试,整个制动系统使用和维护方便。
- 还没有人留言评论。精彩留言会获得点赞!