一种智能驾驶车辆横、纵向速度冗余校验的方法与流程
本发明涉及智能驾驶,具体是涉及一种智能驾驶车辆横、纵向速度冗余校验的方法。
背景技术:
1、智能驾驶本质上涉及注意力吸引和注意力分散的认知工程学,主要包括网络导航、自主驾驶和人工干预三个环节。智能驾驶的前提条件是,我们选用的车辆满足行车的动力学要求,车上的传感器能获得相关视听觉信号和信息,并通过认知计算控制相应的随动系统,智能驾驶与无人驾驶是不同概念,智能驾驶更为宽泛,它指的是机器帮助人进行驾驶,以及在特殊情况下完全取代人驾驶的技术。目前感知软件通过视觉、高精地图、激光雷达等传感器测量或标定得出目标物体的纵向速度参数和横向速度参数,应用层软件获取感知输入的基本数据后,进行滤波,剔除突变类的数据,即可进行相关功能运算。现有技术几乎完全相信感知软件通过相机、高精地图、激光雷达等传感器测量或标定得出目标物体的横、纵向速度参数,只是简单进行滤波处理,排除明显的错误数据。这样会导致智能系统过于相信感知传感器的数据,如果通过欺骗传感器给出一组连续均匀但错误的数据,或传感器因为自身原因导致识别精度下降,那么,应用层软件将无法识别,立刻出现错误。
2、因此,需要提供一种智能驾驶车辆横、纵向速度冗余校验的方法,旨在解决上述问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种智能驾驶车辆横、纵向速度冗余校验的方法,以解决上述背景技术中存在的问题。
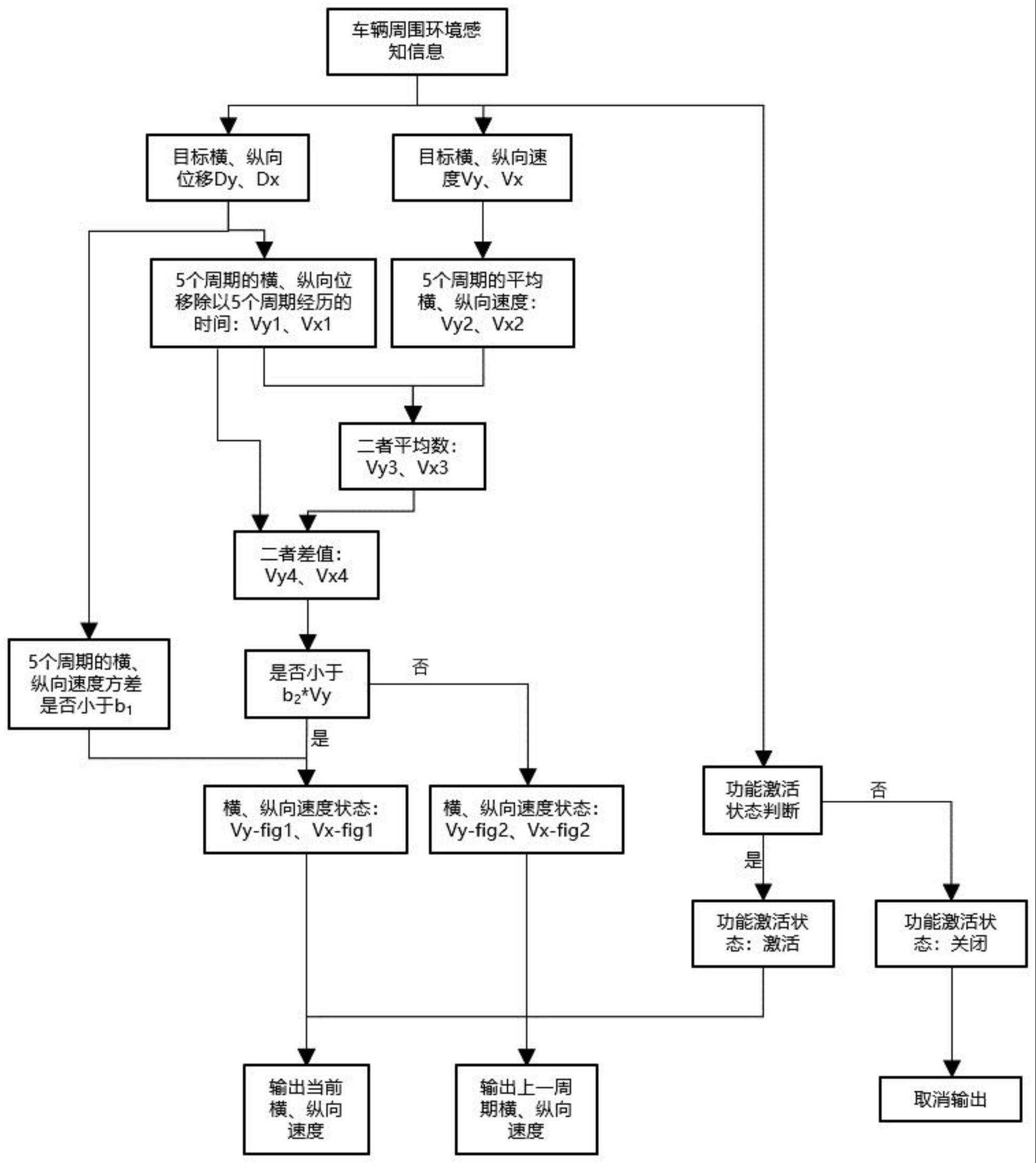
2、本发明是这样实现的,一种智能驾驶车辆横、纵向速度冗余校验的方法,所述方法包括以下步骤:
3、获取横向位移dx、纵向位移dy、横向速度vx以及纵向速度vy;
4、通过横向位移dx和纵向位移dy计算5个周期的方差,判断所述方差是否小于第一参数b1;
5、通过横向位移dx和纵向位移dy计算5个周期的平均速度vy1和vx1;
6、通过横向速度vx以及纵向速度vy计算5个周期的平均值vy2和vx2;
7、求取vy1和vy2的均值vy3,vx1和vx2的均值vx3;
8、求取vy1和vy3的差值vy4,vx1和vx3的差值vx4;
9、判断vy4是否小于b2×vy,vx4是否小于b2×vx,所述b2为第二参数;
10、当方差小于第一参数b1、vy4小于b2×vy且vx4小于b2×vx时,确定横向速度状态为vx-fig1,纵向速度状态为vy-fig1;否则确定横向速度状态为vx-fig2,纵向速度状态为vy-fig2;
11、判断应用层功能是否被激活,当功能被激活时,输出vx-fig1和vy-fig1或者vx-fig2和vy-fig2,vx-fig1和vy-fig1为当前的横向速度和纵向速度,vx-fig2和vy-fig2为上一周期的横向速度和纵向速度;当功能未被激活时,取消输出。
12、作为本发明进一步的方案:所述横向位移dx、纵向位移dy、横向速度vx以及纵向速度vy由车辆周围环境感知信息得到,所述车辆周围环境感知信息通过感知层软件获取。
13、作为本发明进一步的方案:获取平均速度vy1和vx1时,确定5个周期的横向位移dx和纵向位移dy,调取5个周期时长,计算得到平均速度vy1和vx1。
14、作为本发明进一步的方案:判断所述方差是否小于第一参数b1时,需要判断5个周期的横向位移方差以及5个周期的纵向位移方差是否同时小于第一参数b1。
15、作为本发明进一步的方案:所述横向位移方差=[(横向位移1-横向位移平均值)2+(横向位移2-横向位移平均值)2+(横向位移3-横向位移平均值)2+(横向位移4-横向位移平均值)2+(横向位移5-横向位移平均值)2]÷5。
16、作为本发明进一步的方案:所述纵向位移方差=[(纵向位移1-纵向位移平均值)2+(纵向位移2-纵向位移平均值)2+(纵向位移3-纵向位移平均值)2+(纵向位移4-纵向位移平均值)2+(纵向位移5-纵向位移平均值)2]÷5。
17、作为本发明进一步的方案:平均值vx2等于5个周期的横向速度vx之和除以5,平均值vy2等于5个周期的纵向速度vy之和除以5。
18、作为本发明进一步的方案:所述均值vx3=(vx1+vx2)÷2,均值vy3=(vy1+vy2)÷2。
19、作为本发明进一步的方案:所述差值vx4=|vx1-vx3|,差值vy4=|vy1-vy3|。
20、作为本发明进一步的方案:输出的横向速度状态和纵向速度状态会发送至adas功能模块。
21、与现有技术相比,本发明的有益效果是:
22、本发明通过对输入的横、纵向速度的信息进行校验,在确定没有突变或不合理情况下,将横、纵向速度信息传输给相关控制模块。能够及时发现错误数据,防止应用层软件误执行错误指令或动作;增加应用层软件稳定性,防止当传感器性能下降或不稳定时,造成的功能误触发等现象的发生。应用层软件不完全相信感知层软件的输入,可以很大程度上避免感知层软件识别不稳定,出现数据参数跳动,导致功能被误触发,从数据源头校验数据真实性,过滤发生跳变或因篡改导致错误的数据。
技术特征:
1.一种智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,所述横向位移dx、纵向位移dy、横向速度vx以及纵向速度vy由车辆周围环境感知信息得到,所述车辆周围环境感知信息通过感知层软件获取。
3.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,获取平均速度vy1和vx1时,确定5个周期的横向位移dx和纵向位移dy,调取5个周期时长,计算得到平均速度vy1和vx1。
4.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,判断所述方差是否小于第一参数b1时,需要判断5个周期的横向位移方差以及5个周期的纵向位移方差是否同时小于第一参数b1。
5.根据权利要求4所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,所述横向位移方差=[(横向位移1-横向位移平均值)2+(横向位移2-横向位移平均值)2+(横向位移3-横向位移平均值)2+(横向位移4-横向位移平均值)2+(横向位移5-横向位移平均值)2]÷5。
6.根据权利要求4所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,所述纵向位移方差=[(纵向位移1-纵向位移平均值)2+(纵向位移2-纵向位移平均值)2+(纵向位移3-纵向位移平均值)2+(纵向位移4-纵向位移平均值)2+(纵向位移5-纵向位移平均值)2]÷5。
7.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,平均值vx2等于5个周期的横向速度vx之和除以5,平均值vy2等于5个周期的纵向速度vy之和除以5。
8.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,所述均值vx3=(vx1+vx2)÷2,均值vy3=(vy1+vy2)÷2。
9.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,所述差值vx4=|vx1-vx3|,差值vy4=|vy1-vy3|。
10.根据权利要求1所述的智能驾驶车辆横、纵向速度冗余校验的方法,其特征在于,输出的横向速度状态和纵向速度状态会发送至adas功能模块。
技术总结
本发明适用于智能驾驶技术领域,提供了一种智能驾驶车辆横、纵向速度冗余校验的方法,包括以下步骤:获取横向位移、纵向位移、横向速度以及纵向速度;通过横、纵向位移计算5个周期的方差,判断所述方差是否小于b<subgt;1</subgt;;通过横向位移和纵向位移计算5个周期的平均速度和;通过横向速度以及纵向速度计算5个周期的平均值;求取均值和差值;判断差值是否小于b<subgt;2</subgt;×横、纵向速度;当方差小于b<subgt;1</subgt;且差值小于b<subgt;2</subgt;×横、纵向速度时,确定横、纵向速度状态为Vx‑fig1和Vy‑fig1;否则,确定横、纵向速度状态为Vx‑fig2和Vy‑fig2。本发明通过对输入的横、纵向速度的信息进行校验,能够及时发现错误数据,防止应用层软件误执行错误指令。
技术研发人员:李建伟
受保护的技术使用者:阿尔特汽车技术股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!