一种运用于移动机器人的四轮独立悬挂系统的制作方法
本发明属于移动机器人,特别是涉及一种运用于移动机器人的四轮独立悬挂系统。
背景技术:
1、针对移动机器人的自走,经过不平整路面时会产生振动,而由于机器人内部元件较多且精密性紧凑度较高,过度振动会影响机器人移动的稳定性和内部元件的使用寿命,影响机器人的稳定性,若是针对过度不平的场所,可能会造成轮体抬起无法产生摩擦力造成无法移动的问题,因此为机器人的轮体设计出悬挂则可解决上述问题。
2、而针对现有的机器人的悬挂系统,由于机器人内部空间有限,因此大多在轮体和机器人底盘之间设置悬挂,如申请号为201710470310.3的专利文件,其中公开可转动式的轮架配合普通弹簧作为悬挂,虽然占用空间较小,然而依旧会出现抗振效果不好、稳定性不足和寿命不足的问题。
技术实现思路
1、本发明的目的在于提供一种运用于移动机器人的四轮独立悬挂系统,通过设计新型的悬挂系统,可使两个前轮和两个后轮都具备独立悬挂的功能,满足不平整平面或路面的行走,具备高效的减振和缓冲功能,可对机器人内部元件进行防护,且所用的悬挂系统结构紧凑,可在有限的空间内设置空气弹簧和摆臂结构,相比于传统弹簧,负载较大、弹性较强、稳定性较高且使用寿命较长。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明为一种运用于移动机器人的四轮独立悬挂系统,包括一组前轮、一组后轮和悬挂系统,所述悬挂系统包括机械臂安装座、前悬挂总成和后悬挂总成;
4、所述前悬挂总成包括前支架和两个气弹簧;
5、所述前支架底部固定有安装座,所述安装座固定在机器人的机壳底座顶部;
6、所述前支架两侧顶部均设有上支臂,所述前支架两侧中部均转动连接有上摆臂,所述前支架两侧底部均转动连接有下摆臂,所述前支架同一侧的上摆臂和下摆臂平行分布;
7、两所述气弹簧一端分别与两上支臂转动连接,两所述气弹簧另一端分别与两下摆臂的中部转动连接,所述气弹簧与上摆臂互不干涉;
8、所述后悬挂总成的结构特征与前悬挂总成的结构特征一致;
9、所述前轮通过前羊角固定在前悬挂总成同一侧的上摆臂和下摆臂端部之间,所述前羊角与上摆臂和下摆臂连接处转动连接;
10、所述后轮通过后羊角固定在后悬挂总成同一侧的上摆臂和下摆臂端部之间,所述后羊角与上摆臂和下摆臂连接处转动连接;
11、所述机械臂安装座前侧和后侧均设有连接部,所述连接部端部两侧均设有支脚;
12、所述前悬挂总成和后悬挂总成上的上支臂分别固定在两连接部端部的支脚底部。
13、进一步地,所述上支臂、上摆臂和下摆臂均为板式结构,所述上摆臂上设有让位口,所述气弹簧贯穿让位口。
14、进一步地,所述前支架上两上支臂均与前支架一体成型,所述前支架上两上支臂均为斜臂结构且呈v字形分布。
15、进一步地,所述上支臂顶部设有平直面,所述上支臂和支脚之间的紧固件设置在平直面的位置。
16、进一步地,所述连接部上设有腰形口,所述连接部和支脚均与机械臂安装座一体成型。
17、进一步地,所述前轮为设有轮毂电机的行走轮,所述后轮为万向轮。
18、本发明具有以下有益效果:
19、1、本发明通过设计新型的悬挂系统,可使两个前轮和两个后轮都具备独立悬挂的功能,满足不平整平面或路面的行走,可提高机器人移动走动的稳定性,同时缓冲效果较好,具备高效的减振和缓冲功能,可对机器人内部元件进行防护。
20、2、本发明所用的悬挂系统结构紧凑,避免占用空间过大的问题,可在有限的空间内设置空气弹簧和摆臂结构,相比于传统弹簧,负载较大、弹性较强、稳定性较高且使用寿命较长。
21、3、本发明所用的前悬挂总成和后悬挂总成的结构特征一致,可适用于行走轮和万向轮的设置,利于生产组装和后续的更换维护,生产成本和维护成本较低。
22、4、本发明的前悬挂总成和后悬挂总成上前支架、气弹簧、上摆臂、下摆臂和羊角相互之间的连接处均为双侧紧固支撑,各个连接点的紧固性较强,提高了悬挂总成的稳定性。
23、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
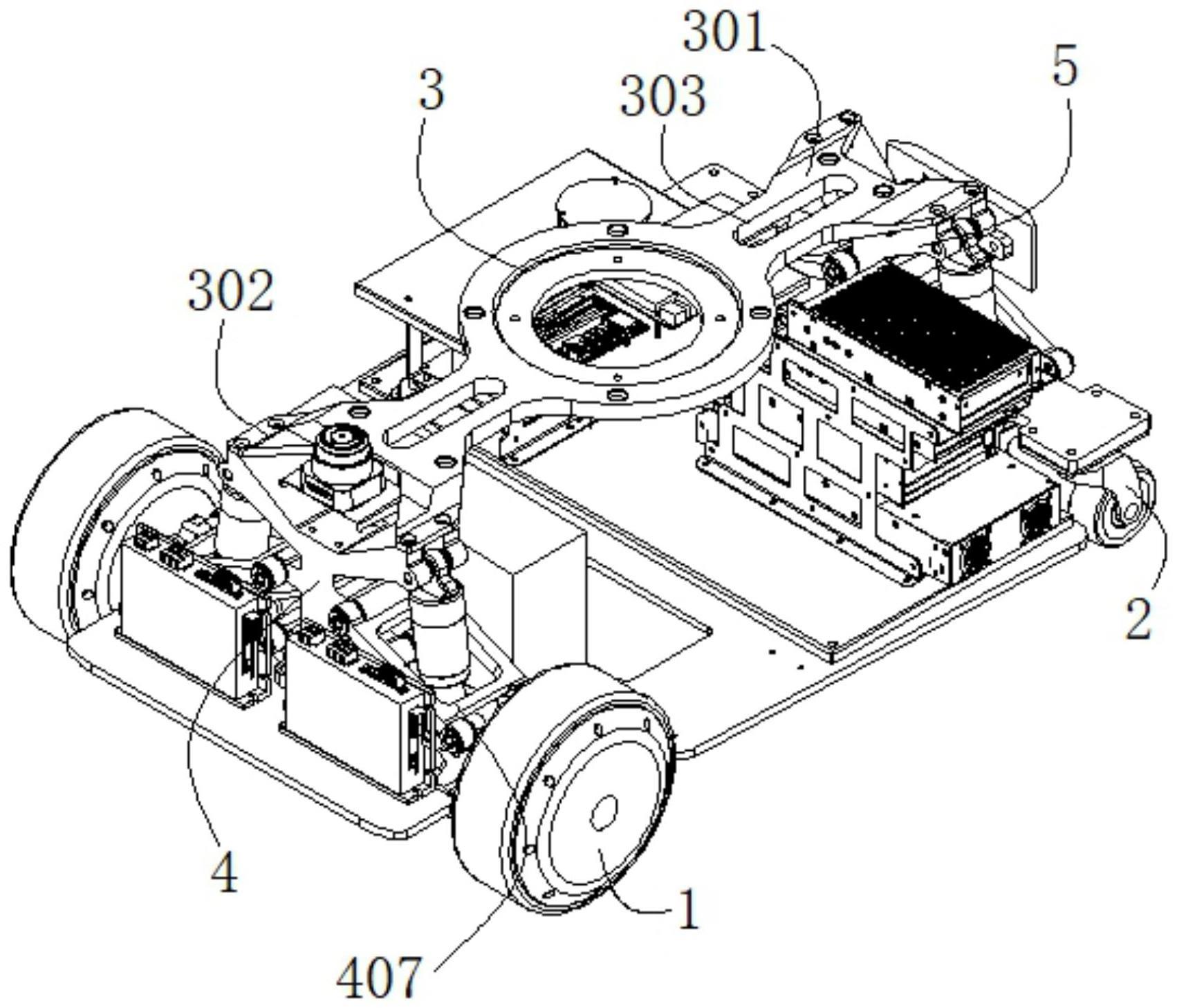
1.一种运用于移动机器人的四轮独立悬挂系统,包括一组前轮(1)、一组后轮(2)和悬挂系统,其特征在于:所述悬挂系统包括机械臂安装座(3)、前悬挂总成(4)和后悬挂总成(5);
2.根据权利要求1所述的一种运用于移动机器人的四轮独立悬挂系统,其特征在于,所述上支臂(404)、上摆臂(405)和下摆臂(406)均为板式结构,所述上摆臂(405)上设有让位口(407),所述气弹簧(402)贯穿让位口(407)。
3.根据权利要求1所述的一种运用于移动机器人的四轮独立悬挂系统,其特征在于,所述前支架(401)上两上支臂(404)均与前支架(401)一体成型,所述前支架(401)上两上支臂(404)均为斜臂结构且呈v字形分布。
4.根据权利要求1所述的一种运用于移动机器人的四轮独立悬挂系统,其特征在于,所述上支臂(404)顶部设有平直面,所述上支臂(404)和支脚(302)之间的紧固件设置在平直面的位置。
5.根据权利要求1所述的一种运用于移动机器人的四轮独立悬挂系统,其特征在于,所述连接部(301)上设有腰形口(303),所述连接部(301)和支脚(302)均与机械臂安装座(3)一体成型。
6.根据权利要求1所述的一种运用于移动机器人的四轮独立悬挂系统,其特征在于,所述前轮(1)为设有轮毂电机的行走轮,所述后轮(2)为万向轮。
技术总结
本发明公开了一种运用于移动机器人的四轮独立悬挂系统,涉及移动机器人技术领域。本发明包括一组前轮、一组后轮和悬挂系统,悬挂系统包括机械臂安装座、前悬挂总成和后悬挂总成,前悬挂总成包括前支架和两个气弹簧,前支架底部固定有安装座,安装座固定在机器人的机壳底座顶部。本发明通过设计新型的悬挂系统,可使两个前轮和两个后轮都具备独立悬挂的功能,满足不平整平面或路面的行走,具备高效的减振和缓冲功能,可对机器人内部元件进行防护,且所用的悬挂系统结构紧凑,可在有限的空间内设置空气弹簧和摆臂结构,相比于传统弹簧,负载较大、弹性较强、稳定性较高且使用寿命较长。
技术研发人员:黄渊海,邹欣珏,刘强,陈春晓,张凯,宋鑫,王正
受保护的技术使用者:江阴萃科智能制造技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!