一种客货车盲区防碰撞方法、系统、设备及存储介质与流程
本发明属于汽车视觉辅助领域,涉及一种客货车盲区防碰撞方法、系统、设备及存储介质。
背景技术:
1、现如今,客货车交通事故频发,一方面原因是客货车的车辆比较高,车身比较长,驾驶人员对于车辆前方以及左右两侧的视觉盲区比较大,为导致驾驶员不能够很好的发现周围行人及车辆,就最终导致客货车容易与周围车辆及行人发生碰撞。
2、现有客货车辆盲区监测方案已经有很多,例如使用超声波测距的盲区监测系统,但是其有一个比较明显的缺点是精度比较低,对于精度较高的基于雷达的盲区监测系统成本又过高,严重影响系统的推广普及。或者使用360系统,能够直观看出是否有行人靠近。
3、但上述两种监测方式只能当行人与车辆距离很近的情况下,才能够监测到,这样往往来不及做出提示,驾驶员的反应时间太短,仍会造成碰撞。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供一种客货车盲区防碰撞方法、系统、设备及存储介质,扩大了盲区监测范围,减少碰撞发生的几率,降低了成本。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种客货车盲区防碰撞方法,包括以下过程:
4、s1,实时获取客货车周边图像数据;
5、s2,采用标准霍夫线变换标定出图像数据当中的危险碰撞区;
6、s3,对图像数据进行目标检测,获取图像当中行人和车辆的目标检测结果;
7、s4,实时计算出行人和车辆的目标检测结果与客货车危险碰撞区的相对位置及距离,并将计算结果采用opencv处理为图像和文字数据输出至显示器中。
8、优选的,获取转向系统角传动比和轴距,当客货车转弯时,采集方向盘转角,通过方向盘转角、转向系统角传动比和轴距计算得到内轮差,将内轮差采用opencv处理为轨迹图像数据并输出至显示器中。
9、进一步,当方向盘转角大于设定角度时,则认为客货车在转弯,再进行内轮差计算。
10、优选的,s2的具体过程为:提前在地面上用带颜色的线条标识出车辆的危险碰撞区,获取客货车周边图像数据,对采用标准霍夫线变换提取出图像数据中危险碰撞区的线条,并将提取的危险碰撞区的线条标定至后续的图像数据中。
11、优选的,s3中,使用yolov5网络,使用多线程的方式进行目标检测的计算。
12、优选的,s4完成后,实时记录设定时间内行人和车辆与客货车危险碰撞区的相对位置结果,得到客货车危险碰撞区与周围车辆及行人的相对位置变化趋势和速度,预测出客货车周围车辆及行人下一时刻的位置,判断客货车是否有与周围车辆及行人发生碰撞的危险,如果判断结果为存在碰撞危险,则进行对驾驶员进行预警。
13、优选的,当客货车与目标存在碰撞的危险,且驾驶员在设定时间内未进行制动时,控制油门控制装置和制动装置进行紧急制动,直到将车辆刹停。
14、一种客货车盲区防碰撞方法,包括以下过程:
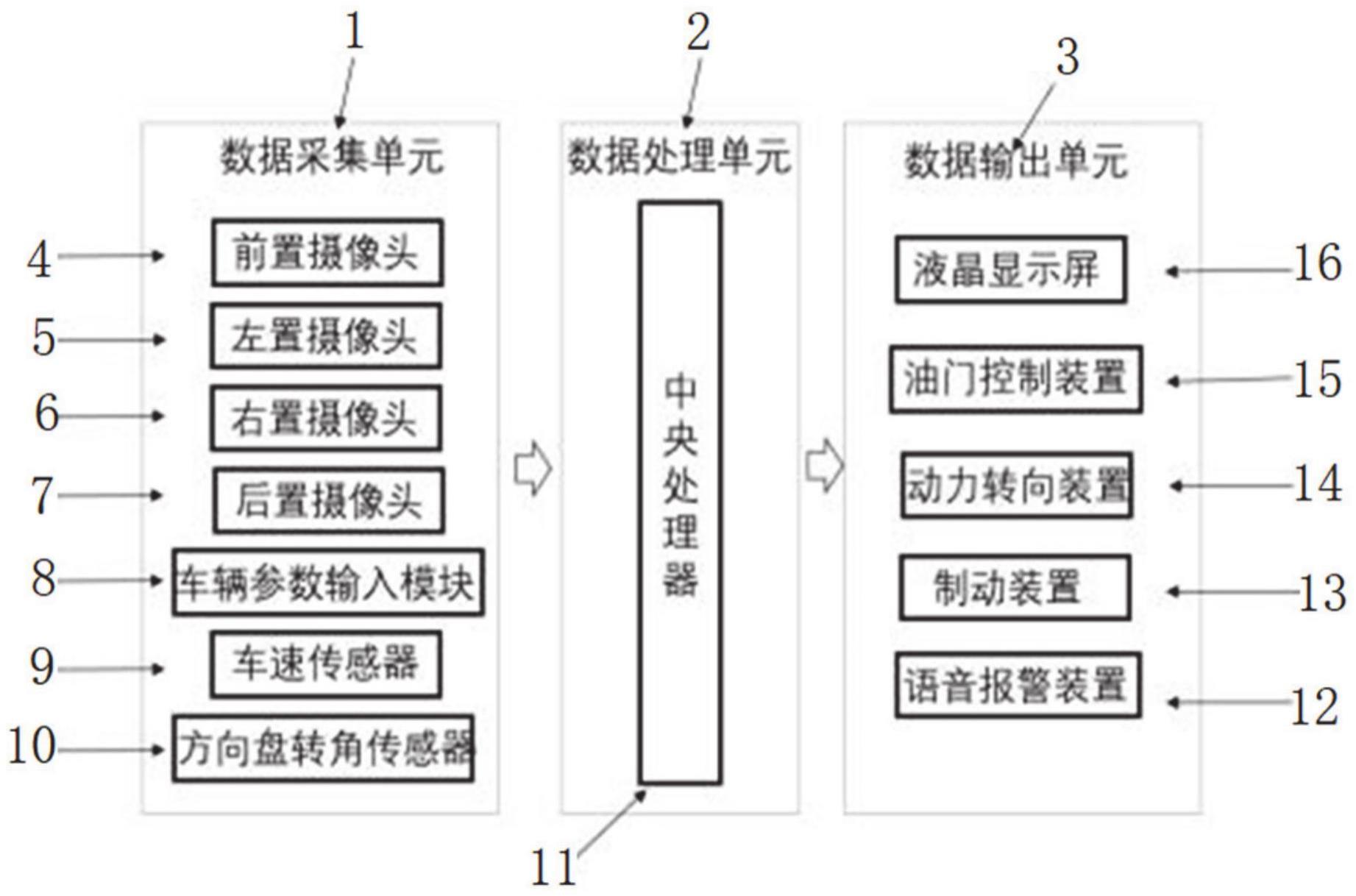
15、图像获取模块,用于实时获取客货车周边图像数据;
16、标定模块,用于采用标准霍夫线变换标定出图像数据当中的危险碰撞区;
17、目标检测模块,用于对图像数据进行目标检测,获取图像当中行人和车辆的目标检测结果;
18、目标计算模块,用于实时计算出行人和车辆的目标检测结果与客货车危险碰撞区的相对位置及距离,并将计算结果采用opencv处理为图像和文字数据输出至显示器中。
19、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述客货车盲区防碰撞方法的步骤。
20、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述客货车盲区防碰撞方法的步骤。
21、与现有技术相比,本发明具有以下有益效果:
22、本发明通过标定出图像数据当中的危险碰撞区,并实时计算行人和车辆的目标检测结果与客货车危险碰撞区的相对位置及距离,并将计算结果作为图像和文字数据输出至显示器中,从而使驾驶员实时看到行人和车辆与客货车危险碰撞区的相对位置及距离,扩大了盲区监测范围,实现较远距离监测,使驾驶员能够提前做出判断,减少碰撞发生的几率,并且不需要使用高精度雷达,降低了成本。
23、进一步,通过对转弯时内轮差的计算,并将内轮差数据轨迹化,增强了驾驶人员对于转弯时行驶轨迹的判断,大大降低客货车在转弯时由于内轮差造成的与行人发生碰撞的几率。
24、进一步,通过对周围车辆及行人的位置预测,判断是否存在碰撞危险,从而做到提前预警,减少发生碰撞的几率。
25、进一步,在有碰撞危险发生的情况下主动对车辆进行紧急制动,大大降低客货车与周围车辆及行人发生碰撞的危险性。
技术特征:
1.一种客货车盲区防碰撞方法,其特征在于,包括以下过程:
2.根据权利要求1所述的客货车盲区防碰撞方法,其特征在于,获取转向系统角传动比和轴距,当客货车转弯时,采集方向盘转角,通过方向盘转角、转向系统角传动比和轴距计算得到内轮差,将内轮差采用opencv处理为轨迹图像数据并输出至显示器中。
3.根据权利要求2所述的客货车盲区防碰撞方法,其特征在于,当方向盘转角大于设定角度时,则认为客货车在转弯,再进行内轮差计算。
4.根据权利要求1所述的客货车盲区防碰撞方法,其特征在于,s2的具体过程为:提前在地面上用带颜色的线条标识出车辆的危险碰撞区,获取客货车周边图像数据,对采用标准霍夫线变换提取出图像数据中危险碰撞区的线条,并将提取的危险碰撞区的线条标定至后续的图像数据中。
5.根据权利要求1所述的客货车盲区防碰撞方法,其特征在于,s3中,使用yolov5网络,使用多线程的方式进行目标检测的计算。
6.根据权利要求1所述的客货车盲区防碰撞方法,其特征在于,s4完成后,实时记录设定时间内行人和车辆与客货车危险碰撞区的相对位置结果,得到客货车危险碰撞区与周围车辆及行人的相对位置变化趋势和速度,预测出客货车周围车辆及行人下一时刻的位置,判断客货车是否有与周围车辆及行人发生碰撞的危险,如果判断结果为存在碰撞危险,则进行对驾驶员进行预警。
7.根据权利要求1所述的客货车盲区防碰撞方法,其特征在于,当客货车与目标存在碰撞的危险,且驾驶员在设定时间内未进行制动时,控制油门控制装置(15)和制动装置(13)进行紧急制动,直到将车辆刹停。
8.一种客货车盲区防碰撞方法,其特征在于,包括以下过程:
9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任意一项所述客货车盲区防碰撞方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任意一项所述客货车盲区防碰撞方法的步骤。
技术总结
本发明公开了一种客货车盲区防碰撞方法、系统、设备及存储介质,包括以下过程:S1,实时获取客货车周边图像数据;S2,采用标准霍夫线变换标定出图像数据当中的危险碰撞区;S3,对图像数据进行目标检测,获取图像当中行人和车辆的目标检测结果;S4,实时计算出行人和车辆的目标检测结果与客货车危险碰撞区的相对位置及距离,并将计算结果采用OpenCV处理为图像和文字数据输出至显示器中。扩大了盲区监测范围,减少碰撞发生的几率,降低了成本。
技术研发人员:王司宇,柳浩修,张武,韩毅,苏海东,曹君
受保护的技术使用者:西安青牛智驾科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!