一种辅助车辆驾驶的方法及装置与流程
本申请涉及驾驶辅助,特别涉及一种辅助车辆驾驶的方法及装置。
背景技术:
1、随着车辆智能化,驾驶辅助系统对于确保车辆的安全,减少交通事故,以及保护驾驶员的人身安全方面起着重要作用。其中,横向驾驶辅助控制功能可以视觉作为感知来源,控制使车辆居中行驶。对于横向的行驶安全,缺少功能方面的保障。
2、现有技术中,存在采用控制策略进行车道保持的方法,例如当车轮与车道线距离小于预设值时,控制方向盘使车辆居中行驶等。其判断过于单薄、不全面,从而得到的判断结果和对车辆的控制不够准确,容易发生危险,酿成驾驶事故。因此,如何实现对车辆进行安全、可靠和全面的驾驶辅助,成为了亟需解决的问题。
技术实现思路
1、基于上述问题,本申请提供了一种辅助车辆驾驶的方法及装置,以实现对车辆进行安全、可靠和全面的驾驶辅助。
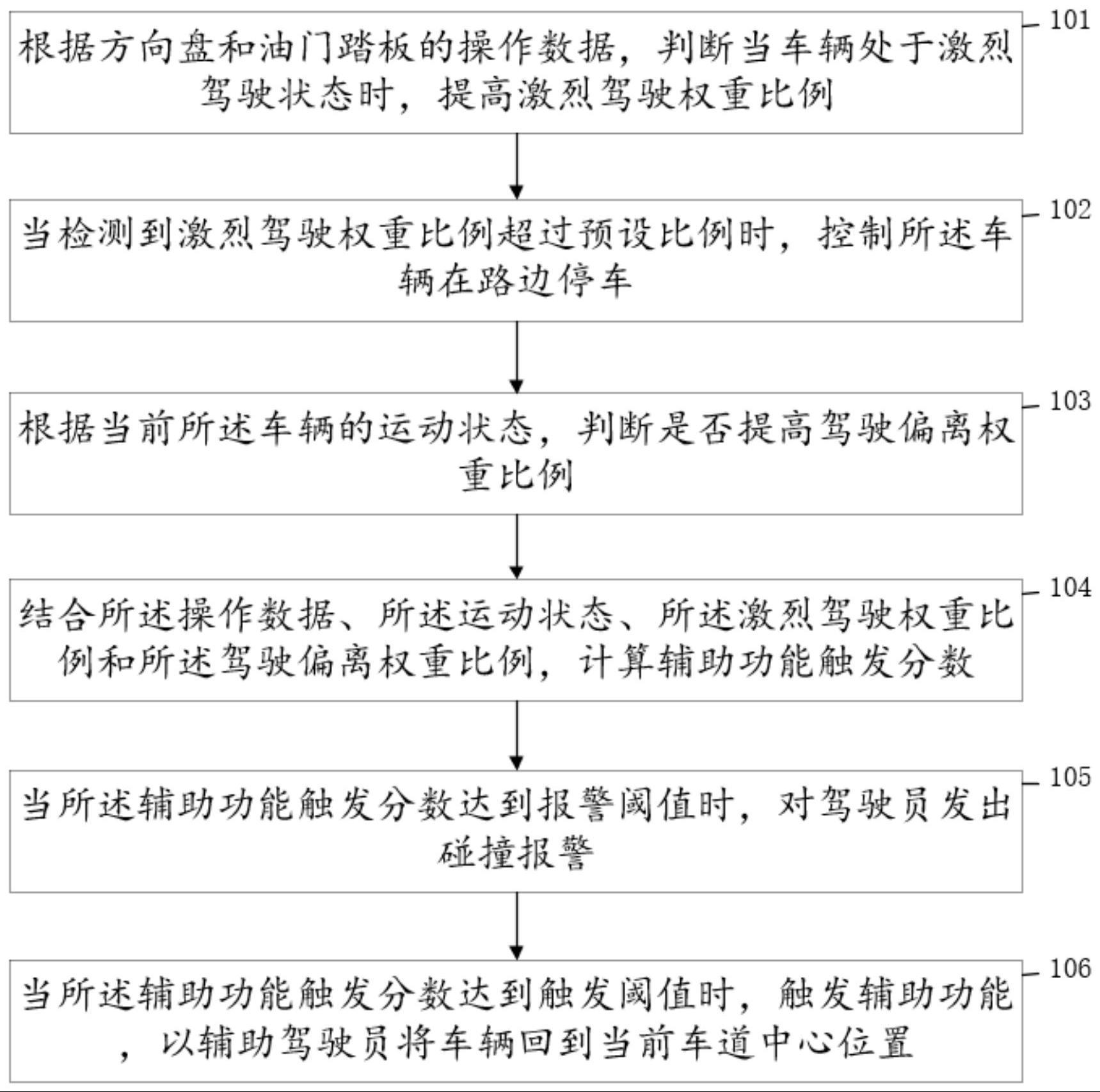
2、本申请公开了一种辅助车辆驾驶的方法,所述方法包括:
3、根据方向盘和油门踏板的操作数据,判断当车辆处于激烈驾驶状态时,提高激烈驾驶权重比例;
4、当检测到激烈驾驶权重比例超过预设比例时,控制所述车辆在路边停车;
5、根据当前所述车辆的运动状态,判断是否提高驾驶偏离权重比例;
6、结合所述操作数据、所述运动状态、所述激烈驾驶权重比例和所述驾驶偏离权重比例,计算辅助功能触发分数;
7、当所述辅助功能触发分数达到报警阈值时,对驾驶员发出碰撞报警;
8、当所述辅助功能触发分数达到触发阈值时,触发辅助功能,以辅助驾驶员将车辆回到当前车道中心位置。
9、可选的,所述根据当前所述车辆的运动状态,判断是否提高驾驶偏离权重比例,包括:
10、根据当前所述运动状态对车辆进行行驶轨迹的计算和预瞄轨迹的预测;
11、当所述行驶轨迹和所述预瞄轨迹的差异值小于等于横向阈值时,提高驾驶偏离权重比例。
12、可选的,根据方向盘和油门踏板的操作数据判断车辆处于激烈驾驶状态,包括:
13、当监测到所述车辆的方向盘转角速率超过预设速率时,判断车辆处于激烈驾驶状态;
14、当监测所述车辆的油门踏板的深度超过预设油门深度,且所述深度的变化率超过预设变化率时,判断车辆处于激烈驾驶状态。
15、可选的,在所述触发辅助功能后,所述方法还包括:当驾驶员接管车辆时,停止辅助功能。
16、可选的,在根据方向盘和油门踏板的操作数据判断激烈驾驶状态前,所述方法还包括:
17、当所述车辆的车轮外边沿与目标物体的距离到达所述横向阈值时,触发辅助功能;所述目标物体包括当前车道的车道线或道路边沿的障碍物。
18、基于上述一种辅助车辆驾驶的方法,本申请还公开了一种辅助车辆驾驶的装置,包括:操作数据分析单元、路边停车单元、运动状态分析单元、分数计算单元、报警单元和辅助驾驶单元;
19、所述操作数据分析单元,用于根据方向盘和油门踏板的操作数据,判断当车辆处于激烈驾驶状态时,提高激烈驾驶权重比例;
20、所述路边停车单元,用于当检测到激烈驾驶权重比例超过预设比例时,控制所述车辆在路边停车;
21、所述运动状态分析单元,用于根据当前所述车辆的运动状态,判断是否提高驾驶偏离权重比例;
22、所述分数计算单元,用于结合所述操作数据、所述运动状态、所述激烈驾驶权重比例和所述驾驶偏离权重比例,计算辅助功能触发分数;
23、所述报警单元,用于当所述辅助功能触发分数达到报警阈值时,对驾驶员发出碰撞报警;
24、所述辅助驾驶单元,用于当所述辅助功能触发分数达到触发阈值时,触发辅助功能,以辅助驾驶员将车辆回到当前车道中心位置。
25、可选的,所述运动状态分析单元包括:
26、轨迹输出子单元,用于根据当前所述运动状态对车辆进行行驶轨迹的计算和预瞄轨迹的预测;
27、轨迹比较子单元,用于当所述行驶轨迹和所述预瞄轨迹的差异值小于等于横向阈值时,提高驾驶偏离权重比例。
28、可选的,所述操作数据分析单元包括:
29、方向盘监测子单元,用于当监测到所述车辆的方向盘转角速率超过预设速率时,判断车辆处于激烈驾驶状态;
30、油门踏板监测子单元,用于当监测所述车辆的油门踏板的深度超过预设油门深度,且所述深度的变化率超过预设变化率时,判断车辆处于激烈驾驶状态。
31、可选的,所述装置还包括:功能退出单元,用于当驾驶员接管车辆时,停止辅助功能。
32、可选的,所述装置还包括:
33、紧急触发单元,用于当所述车辆的车轮外边沿与目标物体的距离到达所述横向阈值时,触发辅助功能;所述目标物体包括当前车道的车道线或道路边沿的障碍物。
34、本申请公开了一种辅助车辆驾驶的方法及装置。根据方向盘和油门踏板的操作数据,判断是否提高激烈驾驶权重比例,根据当前车辆的运动状态,判断是否提高驾驶偏离权重比例。结合操作数据、运动状态、及上述权重比例,计算辅助功能触发分数。结合车辆本身状态和驾驶员驾驶状态两方面,进行对车辆的碰撞预测,不仅可以在正常驾驶环境下辅助车辆驾驶,也可以在极端情况下代替驾驶员接管车辆,更加全面。且当辅助功能触发分数达到报警阈值时,对驾驶员发出碰撞报警,当所述辅助功能触发分数达到触发阈值时,触发辅助功能,以辅助驾驶员将车辆回到当前车道中心位置。
技术特征:
1.一种辅助车辆驾驶的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据当前所述车辆的运动状态,判断是否提高驾驶偏离权重比例,包括:
3.根据权利要求1所述的方法,其特征在于,根据方向盘和油门踏板的操作数据判断车辆处于激烈驾驶状态,包括:
4.根据权利要求1所述的方法,其特征在于,在所述触发辅助功能后,所述方法还包括:当驾驶员接管车辆时,停止辅助功能。
5.根据权利要求2所述的方法,其特征在于,在根据方向盘和油门踏板的操作数据判断激烈驾驶状态前,所述方法还包括:
6.一种辅助车辆驾驶的装置,其特征在于,包括:操作数据分析单元、路边停车单元、运动状态分析单元、分数计算单元、报警单元和辅助驾驶单元;
7.根据权利要求6所述的装置,其特征在于,所述运动状态分析单元包括:
8.根据权利要求6所述的装置,其特征在于,所述操作数据分析单元包括:
9.根据权利要求6所述的装置,其特征在于,所述装置还包括:功能退出单元,用于当驾驶员接管车辆时,停止辅助功能。
10.根据权利要求6所述的装置,其特征在于,所述装置还包括:
技术总结
本申请公开了一种辅助车辆驾驶的方法及装置。根据方向盘和油门踏板的操作数据,判断是否提高激烈驾驶权重比例,根据当前车辆的运动状态,判断是否提高驾驶偏离权重比例。结合操作数据、运动状态、及上述权重比例,计算辅助功能触发分数。结合车辆本身状态和驾驶员驾驶状态两方面,进行对车辆的碰撞预测,不仅可以在正常驾驶环境下辅助车辆驾驶,也可以在极端情况下代替驾驶员接管车辆,更加全面。且当辅助功能触发分数达到报警阈值时,对驾驶员发出碰撞报警,当所述辅助功能触发分数达到触发阈值时,触发辅助功能,以辅助驾驶员将车辆回到当前车道中心位置。
技术研发人员:朱振民,刘威,胡骏,覃力,董毅
受保护的技术使用者:东软睿驰汽车技术(沈阳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!