轨道列车的制动控制系统和制动控制方法与流程
本技术涉及列车制动控制领域,具体而言,涉及一种轨道列车的制动控制系统和制动控制方法。
背景技术:
1、轨道列车是很常见的交通工具。但是,轨道列车的重量大,惯性大,所以有着很长的制动距离。但是,轨道交通因为有着比较严格的管制措施,所以轨道交通中,很少出现突发状况,大部分情况下,都是在预定地点开启制动系统,然后开始减速,直到最后滑行到站台上。列车在制动的过程中,会根据站台距离和当前速率,不断的控制刹车系统的制动力,保证列车停靠的准确性。
2、所以在列车的日常维护过程中,对于制动系统的巡检工作非常重要。目前,方案都是每天对列车的制动系统进行人工巡检,在发现制动系统出现问题之后,及时的进行维修。而制动片作为一个易损件,是重点的检修对象。
3、目前的制动系统中,虽然每个车轮的制动液压系统给予制动片的压力差不多相等,但是,因为需要考虑到防抱死的问题,所以每个车轮的制动液压系统会进行一定的调整;同时,加上其余的影响因素,各个车轮的刹车片的磨损情况并不一致;所以每个刹车片都有可能磨损严重,需要巡检人员仔细的核查每个刹车片的磨损情况,以对出现磨损问题的刹车片及时的更换。所以,巡检强度大,继而容易出现漏检的情况,而导致不合要求的刹车片没有及时更换,而引起的刹车片故障。
技术实现思路
1、本技术的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本技术的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、作为本技术的第一个方面,为了解决轨道列车上,刹车片磨损随机率高,巡检难度大的技术问题:本技术的一些实施例提供了:
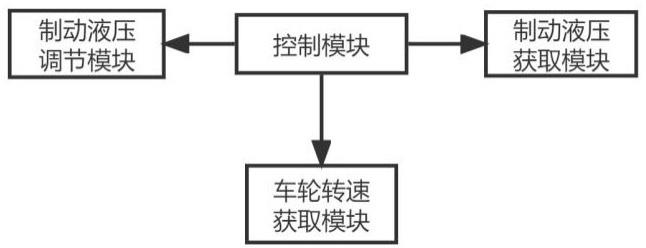
3、一种轨道列车的制动控制系统,包括:控制模块、列车速率获取模块、车轮转速获取模块、制动液压获取模块,以及制动液压调节模块,其中,
4、车轮转速获取模块、制动液压获取模块,以及制动液压调节模块分别与控制模块信号连接;
5、车轮转速获取模块,用于获取列车在制动时,每个车轮的转动速率;
6、制动液压获取模块,用于获取列车在制动时,每个车轮的制动片压力;
7、控制模块获取列车的历史制动数据,历史制动数据包括每次列车在制动时,每个车轮的转动速率以及对应的持续时间,和每个车轮的制动片压力以及对应的持续时间;
8、控制模块,根据历史制动数据计算每个车轮当前的制动片厚度剩余量,以及
9、根据每个车轮的制动片厚度剩余量,计算列车在下次制动时,每个车轮的制动片压力工作值,以平衡所有车轮的制动片厚度剩余量;
10、制动液压控制模块,用于根据控制模块计算出的每个车轮的制动片压力工作值,控制每个车轮的制动片压力。
11、在本方案中,通过收集制动时车轮的转动速率和制动片压力的历史制动数据,并基于历史制动数据计算出每个车轮的制动片的磨损量,可以计算出每个车轮的制动片的剩余磨损量,不仅可以实现剩余磨损量自动检测,而且数据客观、可靠,因此,无需巡检人员进行人工巡检,即使巡检也只是基于安全保障的辅助性检查,劳动强度小。
12、同时,本方案中,还会在制动时,合理的分配每个车轮的制动片压力,平衡所有车轮制动片厚度剩余量,所以每个车轮的制动片的磨损情况基本都相同,在被检查到的制动片符合使用需求的情况下,即使漏检也不会存在因某制动片磨损过大而引发安全事故的情况,而且如此还可以保证所有制动片基本上可以实现同步更换。也就是,巡检人员在发现一块制动片达到更换要求时,其余车轮的制动片也会基本达到更换要求,进而对这些制动片同步进行更换即可。
13、如此,在本方案中,巡检人员一方面可以知道所有的制动片的预计剩余磨损量,减少了巡检压力,另一方面制动片基本上是同步老化、同步更换,所以极大地避免了,现有的方案中,因为只有一两个制动片会存在老化问题,而导致的巡检难度大,巡检压力大的问题。
14、为了收集,制动时,车轮的转动速率,本技术提供如下技术方案:
15、车轮转速模块包括信号接收器和信号发射器,信号发射器固定在车轮上,信号接收器设置在车轮的一侧;信号发射器转动时,周期性的向信号接收器发送信号。
16、本方案中,通过在车轮上设置信号发射器,在车轮的一侧设置信号接收器,信号发射器在车轮转动的过程中,周期性的给信号接收器发射,进而根据信号接收器接收到的信号的频率,判断出车轮的转速。
17、在对车辆制动的过程中,需要通过液压控制系统,来通过液压的方式,推动制动片与制动盘接触,起到刹车的作用。所以,制动片与制动盘的压力可以通过,液压系统内推动制动片的液压来表示。如此,需要收集液压系统的压力,针对这一问题,本技术提供如下技术方案:
18、制动液压获取模块包括压力检测器,压力检测器用于获取推动每个车轮的液压推杆的液压。
19、本方案中,通过压力检测器能够获取每个车轮的制动片分别被液压系统施加了多大的压力。进而,便于控制模块收集每个车轮的制动片的压力信息。
20、一般而言,制动片的剩余厚度与多种因素相关,并不是与某个具体的相关量存在一个线性、或者非线性的显著关系。所以与制动片的剩余厚度的预测难度大。
21、针对这一问题,本技术提供如下技术方案:控制模块内置有神经网络模型,根据神经网络模型预测每个车轮的制动片厚度剩余量。
22、本方案中,在控制模块内置的预测模型为神经网络模型,而神经网络模型需要进行大量的数据训练。所以在神经网络模型完成训练之后,能够更加准确的预测每个车轮的制动片厚度剩余量。
23、作为本技术的第二个方面,为了解决轨道列车上,刹车片磨损随机率高,巡检难度大的技术问题。本技术的一些实施例提供了:一种轨道列车的制动控制方法,包括如下步骤:
24、步骤1:控制模块获取每个车轮的历史制动数据,历史制动数据包括列车在制动时,每个车轮的转动速率以及对应的持续时间,和每个车轮的制动片压力以及对应的持续时间;步骤2:控制模块收集每个车轮的历史制动数据,并根据预测模型,预测每个车轮的制动片厚度剩余量;
25、步骤3:根据每个车轮的制动片厚度剩余量,计算列车在下次制动时,每个车轮的制动片压力工作值,调整每个车轮的制动片压力,以平衡所有车轮的制动片厚度剩余量。
26、本方案中,根据每个车轮在制动过程中,制动片压力、车轮的转动速率,输入到预测模型,能够预测制动片的剩余厚度。其原因在于:列车在制动过程中,制动片与制动盘之间其实是一个动摩擦的关系。所以制动片的磨损情况和制动片与制动片之间的摩擦力和磨损距离有关。而因为是动摩擦的关系,制动片与制动盘之间的摩擦力,只和制动片压力有关;而磨损距离,则是制动片与制动盘相对运动的距离,这一因素则与制动时,车轮的转动速率有关。如此,本方案中,收集了每个车轮的历史制动数据,并输入至预测模型内,从而可以计算出每个车轮的制动片厚度剩余量,进而在下次制动时,合理的分配每个车轮的制动片的压力,从而达到了所有的制动片能够同步磨损的效果;如此,避免列车的刹车片磨损随机率高,巡检难度大的问题。
27、预测模型在使用之前,需要使用足够的样本数据,对预测模型进行训练。但是,如果直接将制动片的磨损量与制动片压力、转动速率,以及对应的持续时间用作训练数据,因为制动片的磨损量的数据比较复杂,数据平稳性不佳,很难体现出制动片压力,车轮转动速率的关系,如此会导致预测模型,最终的预测效果准确度低。
28、针对这一问题,本技术提供如下技术方案:
29、步骤21:预先收集数据集,数据集包括制动片的磨损量与制动片压力和制动片压力持续时间、车轮转速和车轮转速的持续时间的关系;
30、步骤22:将制动片压力和制动片压力持续时间的乘积作为第一变量m,将车轮转速和转速持续时间作为第二变量n;
31、步骤23:将制动片的磨损量组成一个时间序列x(t);
32、步骤24:对时间序列x(t)进行采用数据分解,得到k个相对平稳的子序列imf;
33、步骤25:将分解得到的imf分量与对应的第一变量m和第二变量n进行归一化处理;然后将处理好的数据集划分为训练数据集和验证数据集,将训练数据集发送到预测模型中进行训练,对预测模型完成训练之后,用验证数据集验证;
34、步骤26:列车在每次制动之后,收集第一变量m,第二变量n,将第一变量m和第二变量n,输入至预测模型中,得到每个制动片的预计厚度。
35、在本方案中:在对制动片厚度的数据,采用数据分解的方式,分解成了k个相对平稳的子序列,所以制动片的磨损数据在经过处理之后,平稳性将会更高,在经过归一化处理之后,用于预测模型的训练数据,将会有着更好的效果。
36、并且,针对原先复杂的制动片压力和制动片压力持续时间,会被处理为第一变量,车轮转速和转速持续时间被处理为第二变量。所以,原先4个变量,则会被处理为两个变量,如此简化了数据处理的难度,进而增加了预测模型预测的准确性。
37、在将制动片厚度的数据采用非凸函数或具有尖锐不连续点的函数,优化问题可能更加复杂,进而导致最终对于预测模型的训练情况不理想。
38、本方案中,采用的方式如下:
39、进一步的:
40、分解x(t)的方案如下:
41、s1:设置分解参数:设置分解的参数,包括迭代次数、正则化参数;
42、s2:设置目标函数:分解的目标函数定义如下:
43、j(u, φ) = ∫[∑(uk*φk - x(t))dα * ψ(u)] dt;
44、其中,u表示imf函数集合,φ表示调制函数,k表示imf的索引,α表示正则化参数,ψ(u)表示正则化项,d=2;
45、s3:迭代求解:通过迭代优化的方式求解上述目标函数,迭代过程中,不断更新imf函数集合u和调制函数φ,使目标函数逐步减小;
46、s4:停止准则:根据停止准则判断是否终止迭代;
47、s5输出结果:最终输出得到多个imf函数,表示原始时间序列的不同频率成分。
48、本方案中,目标函数,属于二次函数,二次函数具有平滑的特性,其导数连续且变化较为温和。这种平滑性使得优化算法更容易找到全局最优解或者局部最优解。同时,是采用目标函数进行多次迭代进行分解,分解停止的准则,则是通过预先设置的迭代次数,达到迭代次数之后,停止分解。所以在实际中,可以通过多次实验的方式,获得最佳的迭代次数,然后在后续的模型建立中,设置稳定的迭代次数。如此,保证最终得到的数据优化的效果更好,在用于预测模型的训练时,能够让模型的准确性变得更高。
49、进一步的,预测模型为神经网络模型。
50、进一步的,步骤26中,列车在收集到第一变量m和第二变量n之后,进行归一化处理,然后输入至预测模型中。
- 还没有人留言评论。精彩留言会获得点赞!