智能驾驶特征分析方法、装置、设备及可读存储介质与流程
本发明涉及智能驾驶,尤其涉及一种智能驾驶特征分析方法、装置、设备及可读存储介质。
背景技术:
1、目前针对智能驾驶特征的分析主要是基于道路环境感知设备发出的信号参数进行本车驾驶特征的判断和提取,主要用于分析车辆的行驶环境及障碍物等对智能驾驶的影响,对于提升智能驾驶系统的决策所能提供的参考价值非常有限。
技术实现思路
1、本发明的主要目的在于提供一种智能驾驶特征分析方法、装置、设备及可读存储介质,旨在解决目前的智能驾驶特征分析,对于提升智能驾驶系统的决策所能提供的参考价值非常有限的技术问题。
2、第一方面,本发明提供一种智能驾驶特征分析方法,所述智能驾驶特征分析方法包括:
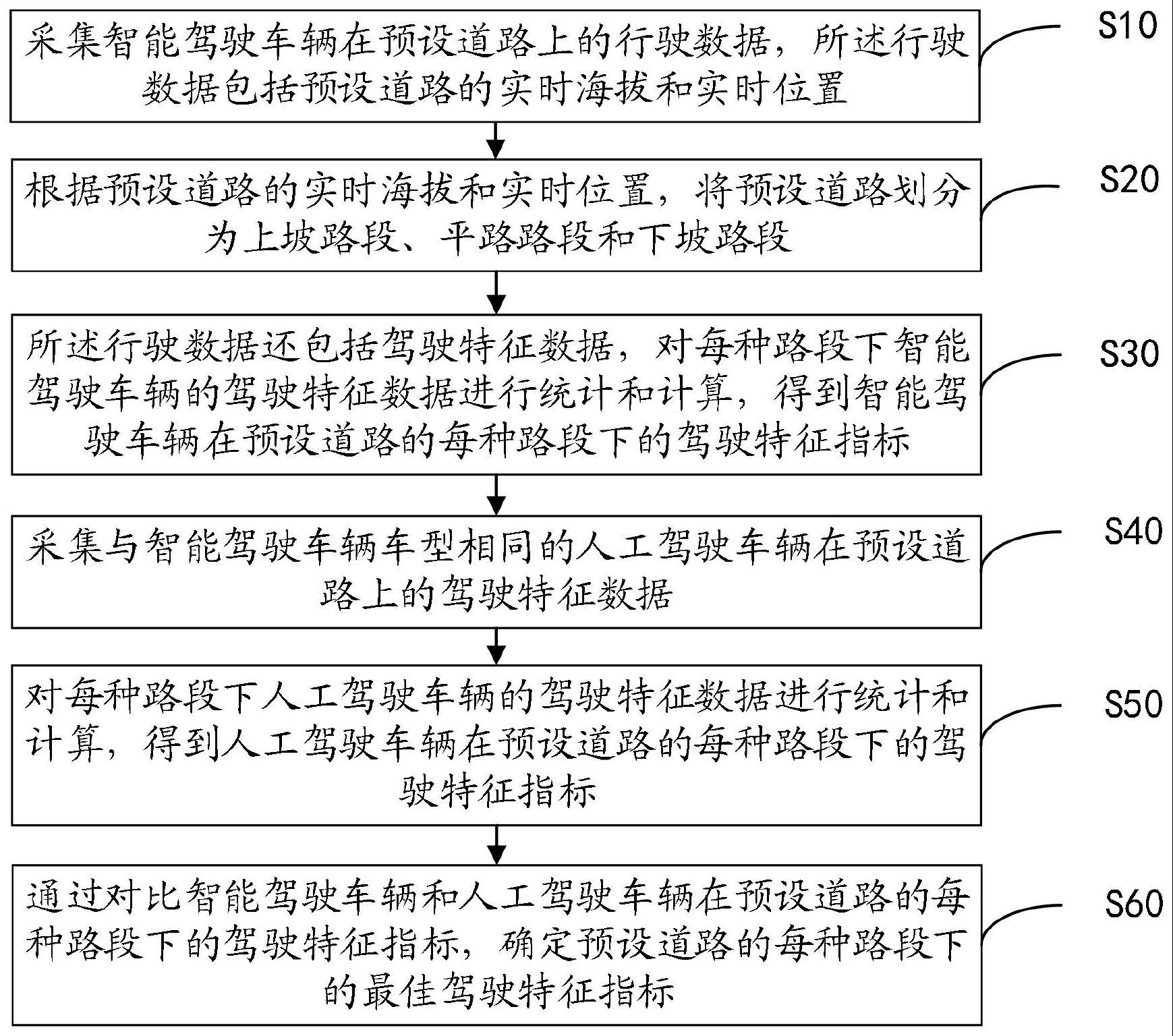
3、采集智能驾驶车辆在预设道路上的行驶数据,所述行驶数据包括预设道路的实时海拔和实时位置;
4、根据预设道路的实时海拔和实时位置,将预设道路划分为上坡路段、平路路段和下坡路段;
5、所述行驶数据还包括驾驶特征数据,对每种路段下智能驾驶车辆的驾驶特征数据进行统计和计算,得到智能驾驶车辆在预设道路的每种路段下的驾驶特征指标;
6、采集与智能驾驶车辆车型相同的人工驾驶车辆在预设道路上的驾驶特征数据;
7、对每种路段下人工驾驶车辆的驾驶特征数据进行统计和计算,得到人工驾驶车辆在预设道路的每种路段下的驾驶特征指标;
8、通过对比智能驾驶车辆和人工驾驶车辆在预设道路的每种路段下的驾驶特征指标,确定预设道路的每种路段下的最佳驾驶特征指标。
9、可选的,所述采集智能驾驶车辆在预设道路上的行驶数据包括:
10、云平台将数据采集配置下发给车载终端;
11、车载终端根据数据采集配置采集智能驾驶车辆在预设道路上的行驶数据。
12、可选的,所述根据预设道路的实时海拔和实时位置,将预设道路划分为上坡路段、平路路段和下坡路段包括:
13、在预设道路上,确定起始位置;
14、计算距离起始位置预设里程位置处的实时海拔和起始位置处的实时海拔之间的差值;
15、若距离起始位置预设里程位置处的实时海拔和起始位置处的实时海拔之间的差值大于等于预设海拔,则将起始位置和距离起始位置预设里程位置之间的路段识别为上坡路段,若实时海拔保持上升,则继续识别为上坡路段,若实时海拔出现下降或保持不变,则将实时海拔出现下降或保持不变时的实时位置识别为上坡路段的终点位置,并作为下一路段的起始位置;
16、若起始位置处的实时海拔和距离起始位置预设里程位置处的实时海拔之间的差值大于等于预设海拔,则将起始位置和距离起始位置预设里程位置之间的路段识别为下坡路段,若实时海拔保持下降,则继续识别为下坡路段,若实时海拔出现上升或保持不变,则将实时海拔出现上升或保持不变时的实时位置识别为下坡路段的终点位置,并作为下一路段的起始位置;
17、若起始位置处的实时海拔和距离起始位置预设里程位置处的实时海拔之间的差值小于预设海拔,或距离起始位置预设里程位置处的实时海拔和起始位置处的实时海拔之间的差值小于预设海拔,则将起始位置和距离起始位置预设里程位置之间的路段识别为平路路段,若实时海拔保持不变,则继续识别为平路路段,若实时海拔出现上升或下降,则将实时海拔出现上升或下降时的实时位置识别为平路路段的终点位置,并作为下一路段的起始位置;
18、若预设道路的路段类型未划分结束,则将下一路段的起始位置作为新的起始位置,并返回执行所述计算距离起始位置预设里程位置处的实时海拔和起始位置处的实时海拔之间的差值的步骤。
19、可选的,所述智能驾驶车辆的驾驶特征数据包括智能驾驶状态、智能驾驶降级标识、智能驾驶接管标识、挡位状态、实时车速、发动机转速、发动机扭矩、实时油耗及实时里程,所述驾驶特征指标包括智能驾驶状态占比、智能驾驶降级次数、智能驾驶接管次数、挡位跳变次数、平均车速、平均发动机转速、平均发动机扭矩、油耗指标及里程指标,所述对每种路段下智能驾驶车辆的驾驶特征数据进行统计和计算,得到智能驾驶车辆在预设道路的每种路段下的驾驶特征指标包括:
20、针对预设道路的每种路段,通过统计智能驾驶状态的行驶时间在总行驶时间的占比,得到智能驾驶状态占比;
21、通过统计智能驾驶降级标识和智能驾驶接管标识的次数,得到智能驾驶降级次数和智能驾驶接管次数;
22、通过统计挡位状态的变化次数,得到挡位跳变次数;
23、通过计算实时车速、发动机转速及发动机扭矩在路段内的平均值,得到平均车速、平均发动机转速及平均发动机扭矩;
24、通过计算路段内起始位置的实时油耗和终点位置的实时油耗之间的差值,得到油耗指标;
25、通过计算路段内起始位置的实时里程和终点位置的实时里程之间的差值,得到里程指标。
26、可选的,在所述采集与智能驾驶车辆车型相同的人工驾驶车辆在预设道路上的行驶数据之前,包括:
27、通过车联网通信,获取预设道路上过往车辆的型号和驾驶模式;
28、根据过往车辆的型号和驾驶模式,确定与智能驾驶车辆车型相同的人工驾驶车辆。
29、可选的,所述人工驾驶车辆包括多辆,所述通过对比智能驾驶车辆和人工驾驶车辆在预设道路的每种路段下的驾驶特征指标,确定预设道路的每种路段下的最佳驾驶特征指标包括:
30、针对预设道路的每种路段,将所有车辆的驾驶特征指标进行对比;
31、将最低的油耗指标所对应的驾驶特征指标中的智能驾驶降级次数、智能驾驶接管次数、挡位跳变次数、平均车速、平均发动机转速及平均发动机扭矩作为最佳驾驶特征指标。
32、可选的,在所述通过对比智能驾驶车辆和人工驾驶车辆在预设道路的每种路段下的驾驶特征指标,确定预设道路的每种路段下的最佳驾驶特征指标之后,包括:
33、根据预设道路的每种路段下的最佳驾驶特征指标,设置智能驾驶车辆在每种路段下的驾驶行为预设值,以供提升智能驾驶系统的性能。
34、第二方面,本发明还提供一种智能驾驶特征分析装置,所述智能驾驶特征分析装置包括:
35、第一采集模块,用于采集智能驾驶车辆在预设道路上的行驶数据,所述行驶数据包括预设道路的实时海拔和实时位置;
36、划分模块,用于根据预设道路的实时海拔和实时位置,将预设道路划分为上坡路段、平路路段和下坡路段;
37、第一统计计算模块,用于所述行驶数据还包括驾驶特征数据,对每种路段下智能驾驶车辆的驾驶特征数据进行统计和计算,得到智能驾驶车辆在预设道路的每种路段下的驾驶特征指标;
38、第二采集模块,用于采集与智能驾驶车辆车型相同的人工驾驶车辆在预设道路上的驾驶特征数据;
39、第二统计计算模块,用于对每种路段下人工驾驶车辆的驾驶特征数据进行统计和计算,得到人工驾驶车辆在预设道路的每种路段下的驾驶特征指标;
40、确定模块,用于通过对比智能驾驶车辆和人工驾驶车辆在预设道路的每种路段下的驾驶特征指标,确定预设道路的每种路段下的最佳驾驶特征指标。
41、第三方面,本发明还提供一种智能驾驶特征分析设备,所述智能驾驶特征分析设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的智能驾驶特征分析程序,其中所述智能驾驶特征分析程序被所述处理器执行时,实现如上述所述的智能驾驶特征分析方法的步骤。
42、第四方面,本发明还提供一种可读存储介质,所述可读存储介质上存储有智能驾驶特征分析程序,其中所述智能驾驶特征分析程序被处理器执行时,实现如上述所述的智能驾驶特征分析方法的步骤。
43、本发明中,采集智能驾驶车辆在预设道路上的行驶数据,所述行驶数据包括预设道路的实时海拔和实时位置;根据预设道路的实时海拔和实时位置,将预设道路划分为上坡路段、平路路段和下坡路段;所述行驶数据还包括驾驶特征数据,对每种路段下智能驾驶车辆的驾驶特征数据进行统计和计算,得到智能驾驶车辆在预设道路的每种路段下的驾驶特征指标;采集与智能驾驶车辆车型相同的人工驾驶车辆在预设道路上的驾驶特征数据;对每种路段下人工驾驶车辆的驾驶特征数据进行统计和计算,得到人工驾驶车辆在预设道路的每种路段下的驾驶特征指标;通过对比智能驾驶车辆和人工驾驶车辆在预设道路的每种路段下的驾驶特征指标,确定预设道路的每种路段下的最佳驾驶特征指标。本发明通过,通过将预设道路划分为上坡路段、平路路段和下坡路段,并将这三种典型路段下的相同车型的人工驾驶和智能驾驶车辆的驾驶特征指标进行对比,进而确定预设道路的每种路段下的最佳驾驶特征指标,从而能够为提升智能驾驶系统的决策提供更大的参考价值。
- 还没有人留言评论。精彩留言会获得点赞!