车辆横移行驶方法、装置和车辆与流程
本发明涉及车辆控制领域,具体而言,涉及一种车辆横移行驶方法、装置和车辆。
背景技术:
1、为了控制车辆进行横移行驶,例如在保持车身方向不发改变的情况下控制车辆行驶至目标区域时,通常是利用特定的车轮,例如使用非工程麦克纳姆轮实现汽车横移,或者是对车轮设置独立的转向系统,使车轮能够实现较大角度,例如大于90°的转向,从而实现横移行驶,但是这些方式并不适用于普通车辆,例如不具有麦科纳姆轮或者不具有独立转向系统的车辆,目前控制车辆进行横移行驶的难度依旧较大。
2、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种车辆横移行驶方法、装置和车辆,以至少解决相关技术中控制车辆进行横移行驶的难度较大的技术问题。
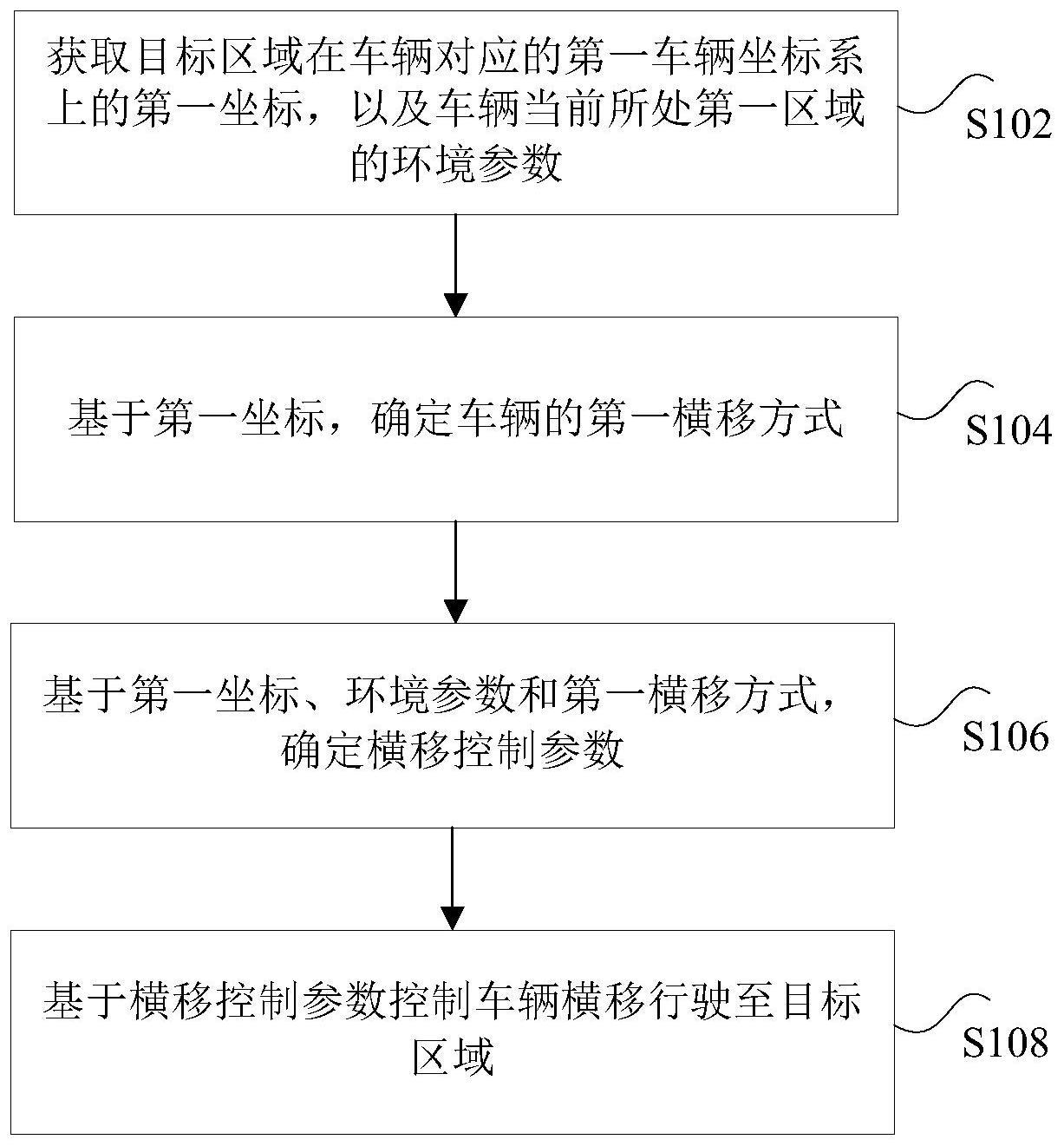
2、根据本发明实施例的一个方面,提供了一种车辆横移行驶方法,包括:获取目标区域在车辆对应的第一车辆坐标系上的第一坐标,以及车辆当前所处第一区域的环境参数,其中,目标区域用于表征车辆预期行驶至的区域;基于第一坐标,确定车辆的第一横移方式;基于第一坐标、环境参数和第一横移方式,确定横移控制参数;基于横移控制参数控制车辆横移行驶至目标区域。
3、可选地,基于第一坐标,确定车辆的第一横移方式,包括:获取车辆上车轮进行转向时的最大角度对应的正切值;响应于第一坐标中横坐标不为预设值,且第一坐标中纵坐标与横坐标的比值的绝对值小于正切值,确定第一横移方式为第一预设方式;响应于横坐标为预设值,确定第一横移方式为第二预设方式;响应于横坐标不为预设值,且绝对值大于或等于正切值,确定第一横移方式为第三预设方式,其中,第一预设方式对车轮的控制过程、第二预设方式对车轮的控制过程,以及第三预设方式对车轮的控制过程不同。
4、可选地,基于第一坐标、环境参数和第一横移方式,确定横移控制参数,包括:确定第一横移方式对应的第一处理方式;按照第一处理方式对第一坐标和环境参数进行处理,得到横移控制参数。
5、可选地,横移控制参数至少包括:车辆上前轮的第一转向方向、前轮的第一转向角度,前轮的第一旋转方向,前轮的第一旋转速度,车辆上后轮的第二转向方向,后轮的第二转向角度,后轮的第二旋转方向和后轮的第二旋转速度,其中,转向方向至少包括:左转向和右转向,旋转方向至少包括:正向旋转和反向旋转。
6、可选地,响应于第一横移方式为第一预设方式,按照第一处理方式对第一坐标和环境参数进行处理,得到横移控制参数,包括:基于第一坐标中的横坐标和第一坐标中的纵坐标,确定第一转向方向、第二转向方向、第一旋转方向和第二旋转方向;基于纵坐标和横坐标的比值,确定第一转向角度和第二转向角度;基于环境参数、横坐标和纵坐标,确定第一旋转速度和第二旋转速度。
7、可选地,响应于第一横移方式为第二预设方式,按照第一处理方式对第一坐标和环境参数进行处理,得到横移控制参数,包括:获取车辆上动力总成当前的运行参数;基于运行参数和第一坐标中的纵坐标,确定第一转向方向、第二转向方向、第一转向角度、第二转向角度、第一旋转方向和第二旋转方向;基于运行参数、环境参数、第一坐标中的横坐标和纵坐标,确定第一旋转速度和第二旋转速度。
8、可选地,响应于第一横移方式为第三预设方式,横移控制参数至少包括:第一控制参数和第二控制参数,按照第一处理方式对第一坐标和环境参数进行处理,得到横移控制参数,包括:基于第一坐标的横坐标确定第二区域,其中,第二区域在第一坐标系中的第二坐标,以及目标区域在第二车辆坐标系中的第三坐标均满足预设坐标条件,第二车辆坐标系的坐标轴方向与第一车辆坐标系的坐标轴方向相同,第二坐标系的原点为第二区域的中心点,预设坐标条件包括:坐标中的横坐标为预设值,或者坐标中的纵坐标与坐标中的横坐标的比值小于正切值;基于第二坐标,确定车辆从第一区域行驶至第二区域的第二横移方式,并基于第三坐标,确定车辆从第二区域行驶至目标区域的第三横移方式;基于第二横移方式,确定第二横移方式对应的第二处理方式,并按照第二处理方式对第二坐标和环境参数进行处理,得到第一控制参数;基于第三横移方式,确定第三横移方式对应的第三处理方式,并按照第三处理方式对第三坐标和环境参数进行处理,得到第二控制参数。
9、可选地,基于横移控制参数控制车辆横移行驶至目标区域,包括:基于第一转向角度和第一转向方向,控制车辆的前轮进行转向,并基于第二转向角度和第二转向方向,控制车辆的后轮进行转向;基于第一旋转方向控制前轮的旋转方向,并基于第二旋转方向控制后轮的旋转方向;基于第一旋转速度控制前轮运行,并基于第二旋转速度控制后轮运行。
10、根据本发明实施例的一个方面,还提供了一种车辆横移行驶装置,包括:获取模块,用于获取目标区域在车辆对应的第一车辆坐标系上的第一坐标,以及车辆当前所处第一区域的环境参数,其中,目标区域用于表征车辆预期行驶至的区域;第一确定模块,用于基于第一坐标,确定车辆的第一横移方式;第二确定模块,用于基于第一坐标、环境参数和第一横移方式,确定横移控制参数;控制模块,用于基于横移控制参数控制车辆横移行驶至目标区域。
11、可选地,第一确定模块包括:正切值获取单元,用于获取车辆上车轮进行转向时的最大角度对应的正切值;第一确定单元,用于响应于第一坐标中横坐标不为预设值,且第一坐标中纵坐标与横坐标的比值的绝对值小于正切值,确定第一横移方式为第一预设方式;第二确定单元,用于响应于横坐标为预设值,确定第一横移方式为第二预设方式;第三确定单元,用于响应于横坐标不为预设值,且绝对值大于或等于正切值,确定第一横移方式为第三预设方式,其中,第一预设方式对车轮的控制过程、第二预设方式对车轮的控制过程,以及第三预设方式对车轮的控制过程不同。
12、可选地,第二确定模块包括:处理方式确定单元,用于确定第一横移方式对应的第一处理方式;参数处理单元,用于按照第一处理方式对第一坐标和环境参数进行处理,得到横移控制参数。
13、可选地,横移控制参数至少包括:车辆上前轮的第一转向方向、前轮的第一转向角度,前轮的第一旋转方向,前轮的第一旋转速度,车辆上后轮的第二转向方向,后轮的第二转向角度,后轮的第二旋转方向和后轮的第二旋转速度,其中,转向方向至少包括:左转向和右转向,旋转方向至少包括:正向旋转和反向旋转。
14、可选地,响应于第一横移方式为第一预设方式,参数处理单元还用于:基于第一坐标中的横坐标和第一坐标中的纵坐标,确定第一转向方向、第二转向方向、第一旋转方向和第二旋转方向;基于纵坐标和横坐标的比值,确定第一转向角度和第二转向角度;基于环境参数、横坐标和纵坐标,确定第一旋转速度和第二旋转速度。
15、可选地,响应于第一横移方式为第二预设方式,参数处理单元还用于:获取车辆上动力总成当前的运行参数;基于运行参数和第一坐标中的纵坐标,确定第一转向方向、第二转向方向、第一转向角度、第二转向角度、第一旋转方向和第二旋转方向;基于运行参数、环境参数、第一坐标中的横坐标和纵坐标,确定第一旋转速度和第二旋转速度。
16、可选地,响应于第一横移方式为第三预设方式,横移控制参数至少包括:第一控制参数和第二控制参数,参数处理单元还用于,包括:基于第一坐标的横坐标确定第二区域,其中,第二区域在第一坐标系中的第二坐标,以及目标区域在第二车辆坐标系中的第三坐标均满足预设坐标条件,第二车辆坐标系的坐标轴方向与第一车辆坐标系的坐标轴方向相同,第二坐标系的原点为第二区域的中心点,预设坐标条件包括:坐标中的横坐标为预设值,或者坐标中的纵坐标与坐标中的横坐标的比值小于正切值;基于第二坐标,确定车辆从第一区域行驶至第二区域的第二横移方式,并基于第三坐标,确定车辆从第二区域行驶至目标区域的第三横移方式;基于第二横移方式,确定第二横移方式对应的第二处理方式,并按照第二处理方式对第二坐标和环境参数进行处理,得到第一控制参数;基于第三横移方式,确定第三横移方式对应的第三处理方式,并按照第三处理方式对第三坐标和环境参数进行处理,得到第二控制参数。
17、可选地,控制模块包括:第一控制单元,用于基于第一转向角度和第一转向方向,控制车辆的前轮进行转向,并基于第二转向角度和第二转向方向,控制车辆的后轮进行转向;第二控制单元,用于基于第一旋转方向控制前轮的旋转方向,并基于第二旋转方向控制后轮的旋转方向;第三控制单元,用于基于第一旋转速度控制前轮运行,并基于第二旋转速度控制后轮运行。
18、根据本发明实施例的一个方面,还提供了一种计算机可读存储介质,计算机可读存储介质包括存储的程序,其中,在程序运行时控制计算机可读存储介质所在设备执行上述中任意一项车辆横移行驶方法。
19、根据本发明实施例的一个方面,还提供了一种处理器,处理器用于运行程序,其中,程序运行时执行上述中任意一项车辆横移行驶方法。
20、根据本发明实施例的一个方面,还提供了一种车辆,包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行上述中任一项车辆横移行驶方法。
21、在本发明实施例中,采用获取目标区域在车辆对应的第一车辆坐标系上的第一坐标,以及车辆当前所处第一区域的环境参数;基于第一坐标,确定车辆的第一横移方式;基于第一坐标、环境参数和第一横移方式,确定横移控制参数;基于横移控制参数控制车辆横移行驶至目标区域的方式,通过根据目标区域在车辆对应的第一车辆坐标系中的第一坐标,确定车辆是否能够直接横移行驶至目标区域,即确定上述的第一横移方式,然后再结合车辆当前所处第一区域的环境参数以及目标区域的第一坐标,确定出第一横移方式对应的横移控制参数,最后利用横移控制参数控制车辆进行横移行驶,不需要使用特定的车轮或者对车轮设置独立的转向系统,从而实使车辆能够横移行驶,降低了车辆横移行驶的难度,进而解决了相关技术中控制车辆进行横移行驶的难度较大的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!