一种电动车刹车识别方法、装置、电子设备及存储介质与流程
本申请实施例涉及电动车,尤其涉及一种电动车刹车识别方法、装置、电子设备及存储介质。
背景技术:
1、刹车功能是二轮电动车骑行安全的核心功能,刹车的作用主要是使电动车按照驾驶员的要求进行减速,并在紧急情况下能快速停车,保证骑行安全。
2、市面上常见的电动车的刹车系统主要由机械和电气两部分组成:机械部分常见的有碟刹和鼓刹,其作用都是通过刹车片的摩擦力使车速快速减小;电气部分是在刹车把处有一按压开关,当驾驶员捏住刹车时,该按压开关同时被按下并将刹车信号传递给电动车的控制器,电动车的控制器接收到刹车信号后会断开电机的驱动。所以电动车刹车时其实是由两个动作组成:停止电机驱动和降低车速。
3、电动车在刹车时关闭电机驱动是非常有必要的,其主要作用包括:1)在紧急制动时,能够非常显著地缩短刹车距离,使刹车更加安全;2)刹车时关闭电机驱动,电动车没有向前的驱动力,制动需要的刹车力也更小,相对地减小了刹车片的摩擦,提高了机械刹车的使用寿命;3)在驾驶员进行点刹时,速度下降更加线性和平滑,提升用户的刹车体验;4)在电动车刹车并停止后,避免电机处于堵转的状态,保护了电机防止电机过流。
4、采用现有的电动车刹车识别方法,当电动车发生紧急刹车时,如果刹车信号开关发生损坏,刹车信号就无法传递给电动车的控制器,电动车的控制器也就无法及时停止电机驱动。
技术实现思路
1、本申请提供一种电动车刹车识别方法、装置、电子设备及存储介质,当电动车发生紧急刹车时,即使刹车信号开关发生损坏,也可以通过根据车轮的角加速度和电机的角加速度来识别电动车是否发生了紧急刹车,从而可以保障电动车安全行使。
2、第一方面,本申请实施例提供了一种电动车刹车识别方法,所述方法包括:
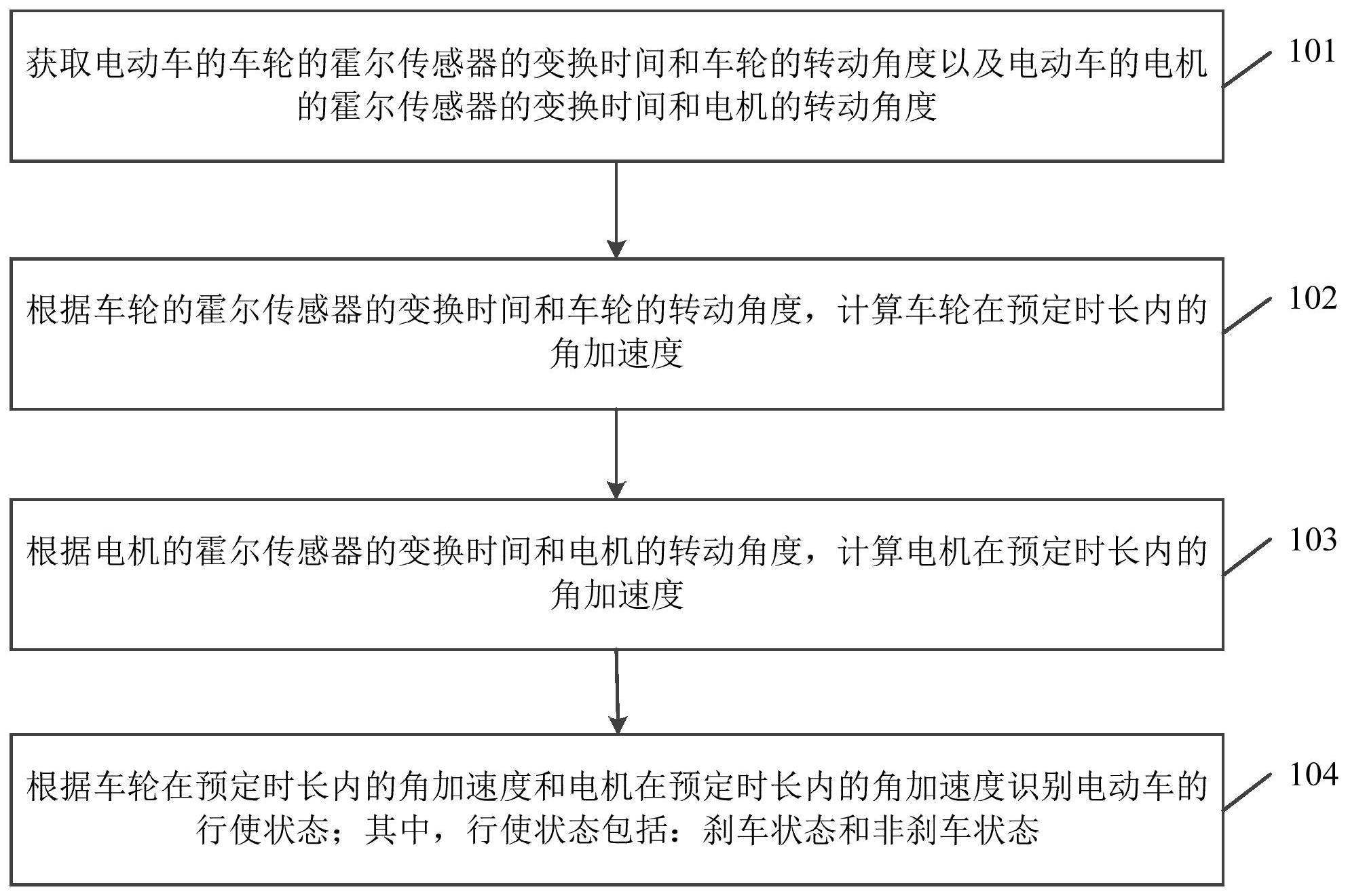
3、获取电动车的车轮的霍尔传感器的变换时间和所述车轮的转动角度以及所述电动车的电机的霍尔传感器的变换时间和所述电机的转动角度;
4、根据所述车轮的霍尔传感器的变换时间和所述车轮的转动角度,计算所述车轮在预定时长内的角加速度;
5、根据所述电机的霍尔传感器的变换时间和所述电机的转动角度,计算所述电机在所述预定时长内的角加速度;
6、根据所述车轮在所述预定时长内的角加速度和所述电机在所述预定时长内的角加速度识别所述电动车的行使状态;其中,所述行使状态包括:刹车状态和非刹车状态。
7、第二方面,本申请实施例还提供了一种电动车刹车识别装置,所述装置包括:获取模块、计算模块和识别模块;其中,
8、所述获取模块,用于获取电动车的车轮的霍尔传感器的变换时间和所述车轮的转动角度以及所述电动车的电机的霍尔传感器的变换时间和所述电机的转动角度;
9、所述计算模块,用于根据所述车轮的霍尔传感器的变换时间和所述车轮的转动角度,计算所述车轮在预定时长内的角加速度;根据所述电机的霍尔传感器的变换时间和所述电机的转动角度,计算所述电机在所述预定时长内的角加速度;
10、所述识别模块,用于根据所述车轮在所述预定时长内的角加速度和所述电机在所述预定时长内的角加速度识别所述电动车的行使状态;其中,所述行使状态包括:刹车状态和非刹车状态。
11、第三方面,本申请实施例提供了一种电子设备,包括:
12、一个或多个处理器;
13、存储器,用于存储一个或多个程序,
14、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本申请任意实施例所述的电动车刹车识别方法。
15、第四方面,本申请实施例提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现本申请任意实施例所述的电动车刹车识别方法。
16、本申请实施例提出了一种电动车刹车识别方法、装置、电子设备及存储介质,先获取电动车的车轮的霍尔传感器的变换时间和车轮的转动角度以及电动车的电机的霍尔传感器的变换时间和电机的转动角度;然后根据车轮的霍尔传感器的变换时间和车轮的转动角度,计算车轮在预定时长内的角加速度;同时根据电机的霍尔传感器的变换时间和电机的转动角度,计算电机在预定时长内的角加速度;再根据车轮在预定时长内的角加速度和电机在预定时长内的角加速度识别电动车的行使状态。也就是说,在本申请的技术方案中,可以根据车轮在预定时长内的角加速度和电机在预定时长内的角加速度来识别电动车是否发生了紧急刹车。而在现有技术中,当电动车发生紧急刹车时,如果刹车信号开关发生损坏,刹车信号就无法传递给电动车的控制器,电动车的控制器也就无法及时停止电机驱动。因此,和现有技术相比,本申请实施例提出的电动车刹车识别方法、装置、电子设备及存储介质,当电动车发生紧急刹车时,即使刹车信号开关发生损坏,也可以通过根据车轮的角加速度和电机的角加速度来识别电动车是否发生了紧急刹车,从而可以保障电动车安全行使;并且,本申请实施例的技术方案实现简单方便、便于普及,适用范围更广。
技术特征:
1.一种电动车刹车识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取电动车的车轮的霍尔传感器的变换时间,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述车轮的霍尔传感器的变换时间和所述车轮的转动角度,计算所述车轮在预定时长内的角加速度,包括:
4.根据权利要求3所述的方法,其特征在于,根据所述车轮速度队列中的预定数量的角速度和所述预定周期,计算所述车轮在所述预定时长内的角加速度,包括:
5.根据权利要求1所述的方法,其特征在于,获取所述电动车的电机的霍尔传感器的变换时间,包括:
6.根据权利要求1所述的方法,其特征在于,根据所述电机的霍尔传感器的变换时间和所述电机的转动角度,计算所述电机在所述预定时长内的角加速度,包括:
7.根据权利要求6所述的方法,其特征在于,根据所述电机速度队列中的预定数量的角速度和所述预定周期,计算所述电机在所述预定时长内的角加速度,包括:
8.根据权利要求1所述的方法,其特征在于,根据所述车轮在所述预定时长内的角加速度和所述电机在所述预定时长内的角加速度识别所述电动车的行使状态,包括:
9.一种电动车刹车识别装置,其特征在于,所述装置包括:获取模块、计算模块和识别模块;其中,
10.一种电子设备,其特征在于,包括:
11.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至8中任一项所述的电动车刹车识别方法。
技术总结
本申请公开了一种电动车刹车识别方法、装置、电子设备及存储介质;该方法包括:获取电动车的车轮的霍尔传感器的变换时间和车轮的转动角度以及电动车的电机的霍尔传感器的变换时间和电机的转动角度;根据车轮的霍尔传感器的变换时间和车轮的转动角度,计算车轮在预定时长内的角加速度;根据电机的霍尔传感器的变换时间和电机的转动角度,计算电机在预定时长内的角加速度;根据车轮在预定时长内的角加速度和电机在预定时长内的角加速度识别电动车的行使状态。当电动车发生紧急刹车时,即使刹车信号开关发生损坏,也可以通过根据车轮的角加速度和电机的角加速度来识别电动车是否发生了紧急刹车,从而可以保障电动车安全行使。
技术研发人员:朱恒捷,胡维超,刘铁丁,张柳鹏,吴传多
受保护的技术使用者:广东高标智能科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!