一种爬壁机器人转运车及工作方法与流程
本发明涉及爬壁机器人,尤其涉及一种爬壁机器人转运车及工作方法。
背景技术:
1、公开该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不必然被视为承认或以任何形式暗示该信息构成已经成为本领域一般技术人员所公知的现有技术。
2、近年来,在石化、核电、船舶制造等企业的生产过程中,为了实现立面焊接自动化,避免搭建脚手架,减少人工成本,爬壁焊接器人的应用越来越多。
3、但在实际生产现场,爬壁焊接机器人的转运、安装等工作还是依赖人工搬运完成,不仅耗时长,效率低。爬壁机器人底部具有磁轮实现吸附和移动,但在磁轮吸附到罐壁的瞬间,由于人工无法精确地把握,强大的吸附力往往会对磁轮造成损伤,甚至使磁轮碎裂,造成爬壁焊接机器人无法正常运行。
技术实现思路
1、针对现有技术存在的不足,本发明实施例的目的是提供一种爬壁机器人转运车,以解决爬壁机器人的转运、安装以及磁轮碎裂等问题。
2、为了实现上述目的,本发明实施例提供了如下技术方案:
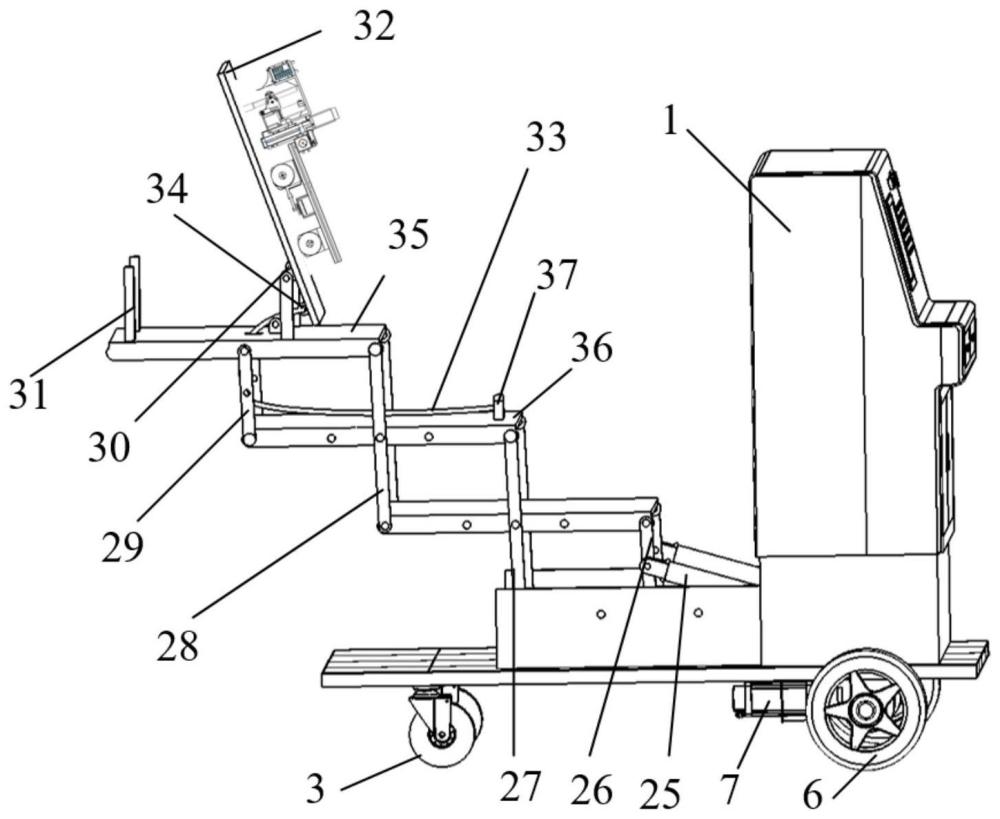
3、一种爬壁机器人转运车,用于将爬壁机器人转运到待攀爬壁面,转运车包括:车体,所述车体上设置有举升机构;所述举升机构包括举升杆、举升架和载物台,所述举升杆与所述举升架连接并能驱动所述举升架沿车体斜上方伸缩,所述爬壁机器人设置在所述载物台上,所述载物台与所述举升架转动连接,并且所述载物台在举升架升起时与待攀爬壁面呈倾斜角度。
4、可选的,所述举升架上设置有支撑杆和支钉,所述支撑杆和支钉等高,所述支撑杆具有两根,两根所述支撑杆之间设置有转动轴,所述载物台与所述转动轴转动连接。
5、可选的,所述举升架设置有第一平台和第二平台,所述第一平台高于所述第二平台,所述支撑杆和支钉设置在所述第一平台上;所述载物台底部设置有第一拉环,所述第二平台上设置有第二拉环,钢丝绳穿过所述第一平台,且钢丝绳一端连接在所述第一拉环,另一端连接在所述第二拉环。
6、可选的,所述举升架包括四个驱动杆和三个平台,四个驱动杆和三个平台呈剪叉形式连接。
7、可选的,所述车体底部设置有驱动机构,所述驱动机构包括导向轮、驱动轮和驱动电机,所述导向轮为万向轮,设置在所述车体的前端,所述驱动轮设置在所述车体的后端,所述驱动轮具有两个,两个驱动轮通过差速器与所述驱动电机连接。
8、可选的,所述导向轮具有两个,两个所述导向轮通过导向机构连接,所述导向机构包括转向电机、驱动螺杆和连杆组件,所述转向电机与所述驱动螺杆连接,所述连杆组件与两个导向轮连接,连杆组件还设置有驱动齿轮,所述驱动齿轮与所述驱动螺杆相啮合。
9、可选的,所述连杆组件包括第一连杆、第二连杆、第三连杆和第四连杆,其中,所述第一连杆和第三连杆转动安装在转运车车架上,两个转向轮分别安装在所述第一连杆和第三连杆上,所述第二连杆一端与所述第一连杆转动连接,另一端与所述第三连杆转动连接;所述第四连杆一端与所述第三连杆转动连接,另一端与所述驱动齿轮转动连接。
10、可选的,所述车体上还设置有控制柜和设备仓,所述控制柜上设置有操作把手、工具箱、控制按键与状态指示灯以及视频信号显示界面。
11、本发明实施例还提供了一种采用如上所述的爬壁机器人转运车的工作方法,包括:将爬壁机器人放置并吸附到所述载物台上,举升杆驱动所述举升架沿车体斜上方伸缩,并使所述载物台与待攀爬壁面从垂直状态变为倾斜状态,爬壁机器人从载物台移动到待攀爬壁面上。
12、可选的,所述载物台与待攀爬壁面的夹角不大于15度。
13、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
14、本发明的爬壁机器人转运车在使用时,先将爬壁机器人放置并吸附到所述载物台上,通过举升杆驱动举升架沿车体斜上方伸缩,进而使装有爬壁机器人的载物台与待攀爬壁面从垂直状态变为倾斜状态,即令爬壁机器人举升至与设备立面形成不大于15°的夹角,因此爬壁机器人可以直接从载物台爬行到设备立面上,避免了对磁轮产生撞击损坏的问题。
15、本发明附加方面的优点将在下面的描述中给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
16、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种爬壁机器人转运车,用于将爬壁机器人转运到待攀爬壁面,其特征在于,转运车包括:车体,所述车体上设置有举升机构;
2.如权利要求1所述的爬壁机器人转运车,其特征在于,所述举升架上设置有支撑杆和支钉,所述支撑杆和支钉等高,所述支撑杆具有两根,两根所述支撑杆之间设置有转动轴,所述载物台与所述转动轴转动连接。
3.如权利要求2所述的爬壁机器人转运车,其特征在于,所述举升架设置有第一平台和第二平台,所述第一平台高于所述第二平台,所述支撑杆和支钉设置在所述第一平台上;所述载物台底部设置有第一拉环,所述第二平台上设置有第二拉环,钢丝绳穿过所述第一平台,且钢丝绳一端连接在所述第一拉环,另一端连接在所述第二拉环。
4.如权利要求3所述的爬壁机器人转运车,其特征在于,所述举升架包括四个驱动杆和三个平台,四个驱动杆和三个平台呈剪叉形式连接。
5.如权利要求1所述的爬壁机器人转运车,其特征在于,所述车体底部设置有驱动机构,所述驱动机构包括导向轮、驱动轮和驱动电机,所述导向轮为万向轮,设置在所述车体的前端,所述驱动轮设置在所述车体的后端,所述驱动轮具有两个,两个驱动轮通过差速器与所述驱动电机连接。
6.如权利要求5所述的爬壁机器人转运车,其特征在于,所述导向轮具有两个,两个所述导向轮通过导向机构连接,所述导向机构包括转向电机、驱动螺杆和连杆组件,所述转向电机与所述驱动螺杆连接,所述连杆组件与两个导向轮连接,连杆组件还设置有驱动齿轮,所述驱动齿轮与所述驱动螺杆相啮合。
7.如权利要求6所述的爬壁机器人转运车,其特征在于,所述连杆组件包括第一连杆、第二连杆、第三连杆和第四连杆,其中,所述第一连杆和第三连杆转动安装在转运车车架上,两个转向轮分别安装在所述第一连杆和第三连杆上,所述第二连杆一端与所述第一连杆转动连接,另一端与所述第三连杆转动连接;所述第四连杆一端与所述第三连杆转动连接,另一端与所述驱动齿轮转动连接。
8.如权利要求1所述的爬壁机器人转运车,其特征在于,所述车体上还设置有控制柜和设备仓,所述控制柜上设置有操作把手、工具箱、控制按键与状态指示灯以及视频信号显示界面。
9.一种采用如权利要求1-8任一项所述的爬壁机器人转运车的工作方法,其特征在于,包括:
10.如权利要求9所述的工作方法,其特征在于,所述载物台与待攀爬壁面的夹角不大于15度。
技术总结
本发明涉及爬壁机器人技术领域,尤其涉及一种爬壁机器人转运车及工作方法。转运车包括:车体,所述车体上设置有举升机构;所述举升机构包括举升杆、举升架和载物台,所述举升杆与所述举升架连接并能驱动所述举升架沿车体斜上方伸缩,所述爬壁机器人设置在所述载物台上,所述载物台与所述举升架转动连接,并且所述载物台在举升架升起时与待攀爬壁面呈倾斜角度。通过本发明解决了爬壁机器人的转运、安装以及磁轮碎裂等问题。
技术研发人员:刘伟,孟超,姜爱宁,李世波,聂炯,修延飞,张华建,李宗泽,任泽良
受保护的技术使用者:山东核电设备制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!