场相关驾驶和外部内容的制作方法
本申请涉及一种用于场相关驾驶的方法和计算机可读介质。
背景技术:
1、自主载具(av)可有助于大大减少交通事故数量和co2排放,并且促成更高效的交通运输系统。然而,当今候选的av技术在以下三个方面不可升级:
2、有限的视场、照明和天气挑战,以及阻塞均会导致检测误差和噪声定位/运动学特性。为了应对这种不佳的现实世界感知输出,av技术的一种方法是投资于昂贵的传感器和/或将专用基础架构集成到道路网中。然而,此尝试代价很高-在基础架构的情况下-地理上受限,且因此无法实现整体上可获取的av技术。
3、不基于昂贵的硬件和基础架构的av技术完全依赖于机器学习及(因此)数据来处理现实世界情形。为了应对检测误差以及学习针对复杂驾驶任务的足够好的驾驶策略,需要大量的数据和计算资源,且仍存在不能正确地处理的极端例子。这些极端例子的共同点是,机器学习模型对于看不见的或令人混淆的情形不能很好地概化,且归因于深度神经网络的黑盒性质,分析故障行为很难。
4、以例如acc、aeb和lca等单独adas功能的形式实施当前道路就绪自动驾驶。达到完全自动驾驶将需要将现有adas功能无缝接合在一起,以及通过添加更多的此类功能(例如,更换车道、交叉路口应对等)来覆盖任何当前非自动的缺口。简单地说,当前自动驾驶不是基于一种可容易地扩展以实现完全自动驾驶的整体性方法。
技术实现思路
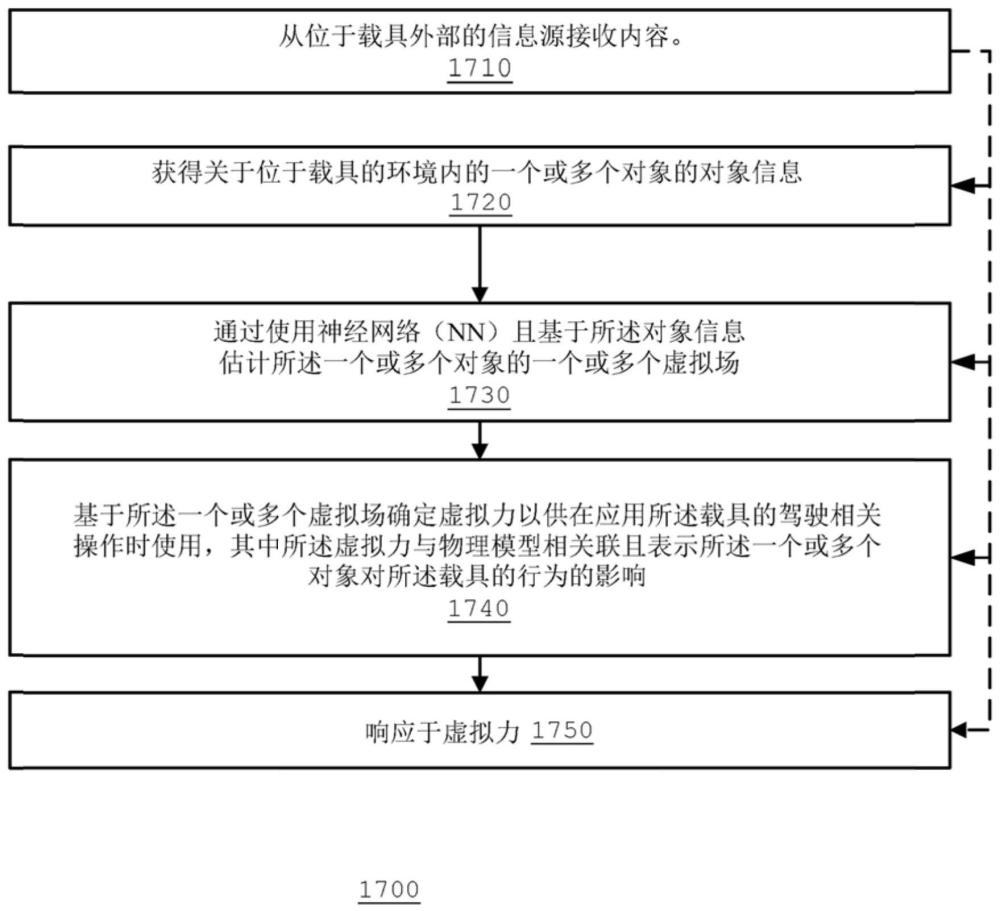
1、本申请提供了一种用于场相关驾驶的方法,所述方法包含:从位于载具外部的信息源接收内容;获得关于位于所述载具的环境内的一个或多个对象的对象信息;通过使用神经网络(nn)且基于所述对象信息估计所述一个或多个对象的一个或多个虚拟场;以及基于所述一个或多个虚拟场确定虚拟力以供在应用所述载具的驾驶相关操作时使用,其中所述虚拟力与物理模型相关联且表示所述一个或多个对象对所述载具的行为的影响。所述获得、所述估计和所述确定的至少一个步骤受所述内容影响。
技术特征:
1.一种计算机实施的且用于场相关驾驶的方法,所述方法包括:
2.根据权利要求1所述的方法,其中所述内容在载具到万物(v2x)通信信道上递送。
3.根据权利要求2所述的方法,其中所述v2x通信信道是载具到载具通信信道、载具到基础架构通信信道、载具到行人通信信道以及载具到网络通信信道中的至少一个。
4.根据权利要求2所述的方法,其在所述v2x信道上传送至少一个所述虚拟力和所述一个或多个虚拟场。
5.根据权利要求1所述的方法,其中所述内容与位于所述环境内的区处的指定对象相关,其中所述影响与所述区相关。
6.根据权利要求1所述的方法,其中获得所述对象信息是根据所述内容。
7.根据权利要求1所述的方法,其中所述内容与未由所述载具感测到的未感测到的对象相关。
8.根据权利要求7所述的方法,其中所述确定所述虚拟力包括避免所述未感测到的对象对所述载具的直接影响。
9.根据权利要求1所述的方法,其中所述信息的所述获得包括从所述信息源接收所述对象信息的至少一部分。
10.根据权利要求1所述的方法,其进一步包括:
11.根据权利要求1所述的方法,其中所述获得、所述估计和所述确定的所述至少一个步骤是基于所述内容选择性地执行。
12.一种存储指令的非暂时性计算机可读介质,所述指令在由至少一个处理器执行时致使所述至少一个处理器执行用于场相关驾驶的操作,包括:
13.根据权利要求12所述的非暂时性计算机可读介质,其中所述内容在载具到万物(v2x)通信信道上递送。
14.根据权利要求13所述的非暂时性计算机可读介质,其中所述v2x通信信道是载具到载具通信信道、载具到基础架构通信信道、载具到行人通信信道以及载具到网络通信信道中的至少一个。
15.根据权利要求13所述的非暂时性计算机可读介质,其在所述v2x信道上传送至少一个所述虚拟力和所述一个或多个虚拟场。
16.根据权利要求12所述的非暂时性计算机可读介质,其中所述内容与位于所述环境内的区处的指定对象相关,其中所述影响与所述区相关。
17.根据权利要求12所述的非暂时性计算机可读介质,其中获得所述对象信息是根据所述内容。
18.根据权利要求12所述的非暂时性计算机可读介质,其中所述内容与未由所述载具感测到的未感测到的对象相关。
19.根据权利要求18所述的非暂时性计算机可读介质,其中所述确定所述虚拟力包括避免所述未感测到的对象对所述载具的直接影响。
20.根据权利要求12所述的非暂时性计算机可读介质,其中所述信息的所述获得包括从所述信息源接收所述对象信息的至少一部分。
技术总结
本发明涉及一种用于场相关驾驶的方法,所述方法包含:从位于载具外部的信息源接收内容;获得关于位于所述载具的环境内的一个或多个对象的对象信息;通过使用神经网络(NN)且基于所述对象信息估计所述一个或多个对象的一个或多个虚拟场;以及基于所述一个或多个虚拟场确定虚拟力以供在应用所述载具的驾驶相关操作时使用,其中所述虚拟力与物理模型相关联且表示所述一个或多个对象对所述载具的行为的影响。所述获得、所述估计和所述确定的至少一个步骤受所述内容影响。
技术研发人员:I·雷切尔高兹,J·恩格尔索伊,A·比斯,J·亨德利
受保护的技术使用者:奥特贝睿技术有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!