一种泊车速度规划方法、电子设备和存储介质与流程
本技术涉及自动驾驶,特别是涉及一种泊车速度规划方法、电子设备和存储介质。
背景技术:
1、随着车辆的发展,人们对自动驾驶的关注度逐步提升。自动驾驶过程中,不仅要考虑行车安全,还需要考虑乘车人的舒适度。而车辆速度的规划和控制是决定乘车人舒适度的关键点。因此,自动泊车的速度规划控制,在产品的研发中十分重要。
技术实现思路
1、本技术主要解决的技术问题是提供一种泊车速度规划方法、电子设备和存储介质,能够提高泊车过程行驶速度的准确性,进一步提高泊车过程安全性和用户舒适度。
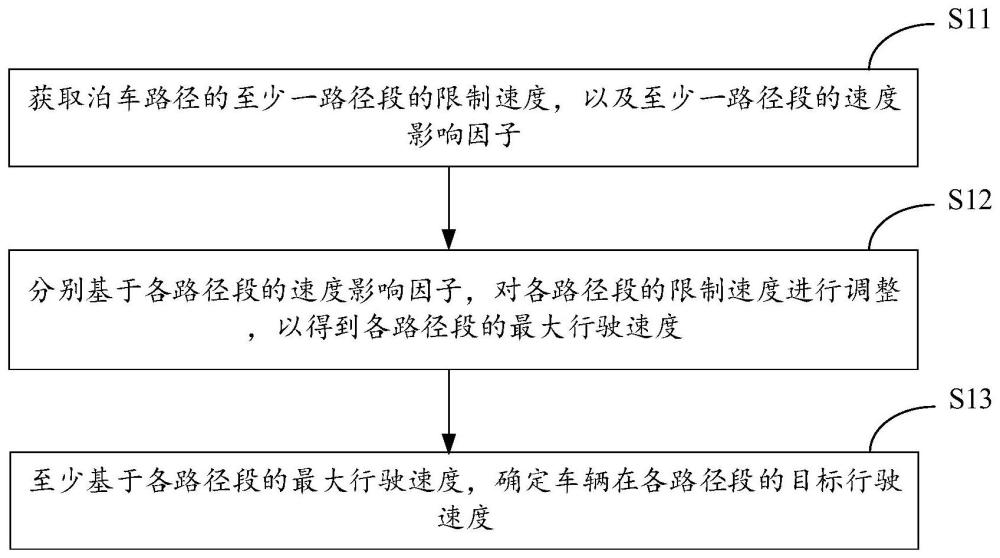
2、为解决上述技术问题,本技术第一方面提供了一种泊车速度规划方法,该方法包括:获取泊车路径的至少一路径段的限制速度,以及至少一路径段的速度影响因子,其中,速度影响因子包括曲率信息或障碍物比例因子,障碍物比例因子表征障碍物对限制速度的影响程度;分别基于各路径段的速度影响因子,对各路径段的限制速度进行调整,以得到各路径段的最大行驶速度;至少基于各路径段的最大行驶速度,确定车辆在各路径段的目标行驶速度。
3、其中,在获取泊车路径的至少一路径段的限制速度之前,还包括:基于障碍物的位置,将泊车路径分为有碰撞路径段和无碰撞路径段;分别基于各路径段的速度影响因子,对各路径段的限制速度进行调整,以得到各路径段的最大行驶速度,包括:对于有碰撞路径段,基于障碍物比例因子对有碰撞路径段的限制速度进行加权,以得到有碰撞路径段的最大行驶速度;对于无碰撞路径段,基于曲率信息对无碰撞路径段的限制速度进行调整,以得到无碰撞路径段的最大行驶速度。
4、其中,基于曲率信息对无碰撞路径段的限制速度进行调整,以得到无碰撞路径段的最大行驶速度,包括:基于无碰撞路径段的曲率比例因子、平均曲率以及预设的曲率阈值,确定曲率对限制速度的影响参数;利用影响参数对无碰撞路径段的限制速度进行加权,以得到无碰撞路径段的最大行驶速度。
5、其中,基于无碰撞路径段的曲率比例因子、平均曲率以及预设的曲率阈值,确定曲率对限制速度的影响参数,包括:基于曲率比例因子和第一数值,得到第一参数;基于平均曲率与预设的曲率阈值的比值对第一参数进行加权,得到第二参数;将第二数值与第二参数之差,作为第三参数;选择曲率比例因子和第三参数中的最大者,作为影响参数。
6、其中,基于障碍物的位置,将泊车路径分为有碰撞路径段和无碰撞路径段,包括:获取泊车路径上的各路径点;其中,各路径点表征不同时刻车辆在泊车路径上的位置;基于各路径点与障碍物之间的距离,确定各路径点是否为碰撞点;对各碰撞点进行聚类,生成有碰撞路径段;将泊车路径中除有碰撞路径段外的路径段,作为无碰撞路径段。
7、其中,有碰撞路径段存在至少两个;对各碰撞点进行聚类,生成有碰撞路径段,包括:判断相邻两个碰撞点之间的路径点的数量是否小于预设阈值;响应于相邻两个碰撞点之间的路径点的数量小于预设阈值,确定相邻两个碰撞点属于同一有碰撞路径段;响应于相邻两个碰撞点之间的路径点的数量不小于预设阈值,确定相邻两个碰撞点属于不同的有碰撞路径段;将属于同一有碰撞路径段的各碰撞点进行拼接,以生成有碰撞路径段。
8、其中,在对各碰撞点进行聚类,生成有碰撞路径段之后,还包括:判断有碰撞路径段的长度是否小于预设长度;响应于长度小于预设长度,将有碰撞路径段作为无碰撞路径段;和/或,判断有碰撞路径段是否为泊车路径的起始路径段或终止路径段;响应于有碰撞路径段为泊车路径的起始路径段或终止路径段,将有碰撞路径段作为无碰撞路径段。
9、其中,判断有碰撞路径段是否为泊车路径的起始路径段或终止路径段,包括:响应于有碰撞路径段中的最后一个碰撞点属于泊车路径的前第三数量个路径点,确定有碰撞路径段为泊车路径的起始路径段;或,响应于有碰撞路径段中第一个碰撞点属于泊车路径的最后第四数量个路径点,确定有碰撞路径段为泊车路径的终止路径段。
10、其中,泊车速度规划方法还包括:获取至少一路径段的端点速度、至少一路径段的端点加速度和最大加速度;至少基于各路径段的最大行驶速度,确定车辆在各路径段的目标行驶速度,包括:基于路径段的端点速度、最大行驶速度、端点加速度和最大加速度,利用贝塞尔曲线得到路径段的加速度曲线;其中,加速度曲线表征车辆在路径段的加速度与时间的关系;基于加速度曲线,得到路径段的速度曲线;其中,速度曲线用于确定车辆在路径段中各时间点的目标行驶速度。
11、其中,车辆在各路径段中均包括至少一种行驶阶段,行驶阶段包括加速阶段、匀速阶段和减速阶段;基于各路径段的端点速度、最大行驶速度、端点加速度和最大加速度,利用贝塞尔曲线得到各路径段的加速度曲线,包括:对于每个路径段,基于路径段的端点速度、最大行驶速度、端点加速度和最大加速度,利用贝塞尔曲线生成各行驶阶段对应的加速度曲线;将各行驶阶段对应的加速度曲线进行拼接,得到路径段的加速度曲线。
12、其中,车辆在路径段中的行驶阶段包括加速阶段,端点加速度包括路径段的起点加速度,端点速度包括起点速度;和/或,车辆在路径段中的行驶阶段包括减速阶段,端点加速度包括路径段的终点加速度,端点速度包括终点速度;基于端点速度、最大行驶速度、端点加速度和最大加速度,利用贝塞尔曲线生成各行驶阶段对应的加速度曲线,包括:利用第一目标方程组,对目标加速度、最大加速度、目标速度、最大行驶速度进行处理,得到贝塞尔曲线的中间控制点;获取起点控制点和终点控制点,基于起点控制点、终点控制点和中间控制点,生成目标行驶阶段对应的加速度曲线;其中,目标行驶阶段为加速阶段时,第一目标方程组为第一方程组,目标加速度为起点加速度,目标速度为起点速度;目标行驶阶段为减速阶段时,第一目标方程组为第二方程组,目标加速度为终点加速度,目标速度为终点速度。
13、其中,泊车速度规划方法还包括如下构建第一目标方程组的步骤:获取各行驶阶段对应的加速度函数;其中,加速度函数基于贝塞尔曲线公式得到;对各加速度函数进行积分,得到速度函数;其中,速度函数表征速度、端点加速度、中间控制点对应的加速度与时间之间的关系;基于速度函数,获取车辆在行驶阶段的结束时间点的速度的表达式;基于速度的表达式,确定第一目标方程组;其中,当端点加速度为起点加速度时,令速度的表达式等于最大行驶速度,中间控制点对应的加速度为最大加速度,以得到第一方程组;当端点加速度为终点加速度时,令速度的表达式等于终点速度,中间控制点对应的加速度为最大加速度,以得到第二方程组。
14、其中,在基于起点控制点、终点控制点和中间控制点,生成目标行驶阶段对应的加速度曲线之后,还包括:基于目标行驶阶段对应的加速度曲线,确定加速度曲线中的最大的加加速度是否大于预设的加加速度;响应于最大的加加速度大于预设的加加速度,利用第二目标方程组,对目标加速度、目标速度、最大行驶速度以及预设的加加速度进行处理,重新得到贝塞尔曲线的中间控制点,并基于起点控制点、终点控制点和中间控制点,重新生成目标行驶阶段对应的加速度曲线;其中,目标行驶阶段为加速阶段时,第二目标方程组为第三方程组,目标加速度为起点加速度,目标速度为起点速度;目标行驶阶段为减速阶段时,第二目标方程组为第四方程组,目标加速度为终点加速度,目标速度为终点速度。
15、其中,泊车速度规划方法还包括如下构建第二目标方程组的步骤:获取各行驶阶段对应的加速度函数;其中,加速度函数基于贝塞尔曲线公式得到;对各加速度函数进行积分,得到速度函数;其中,速度函数表征速度、端点加速度、中间控制点对应的加速度与时间之间的关系;基于速度函数,获取车辆在行驶阶段结束时的速度的表达式;基于速度的表达式,确定第二目标方程组;其中,当端点加速度为起点加速度时,令速度的表达式等于最大行驶速度,中间控制点对应的加速度为预设的加加速度,以得到第三方程组;当端点加速度为终点加速度时,令速度的表达式等于终点速度,中间控制点对应的加速度为预设的加加速度,以得到第四方程组。
16、其中,车辆在路径段中的行驶阶段还包括匀速阶段;在基于起点控制点、终点控制点和中间控制点,生成目标行驶阶段对应的加速度曲线之后,还包括:基于目标行驶阶段对应的加速度曲线,确定目标行驶阶段行驶的路程;将泊车路径的长度与目标行驶阶段行驶的路程之差,作为匀速阶段行驶的路程;基于匀速阶段行驶的路程与匀速阶段的速度,确定匀速阶段的行驶时间;其中,匀速阶段的行驶速度为匀速阶段的前一阶段终点的速度;基于匀速阶段的加速度和匀速阶段的行驶时间,得到匀速阶段的加速度曲线。
17、其中,路径段包含有碰撞路径段,端点速度包含起点速度和终点速度;获取至少一路径段的端点速度,包括:对于有碰撞路径段,判断有碰撞路径段的目标碰撞点是否为泊车路径中与目标碰撞点对应的目标位置点;响应于目标碰撞点不是泊车路径中与目标碰撞点对应的目标位置点,将与目标碰撞点对应的目标位置点速度设置为最大行驶速度;响应于目标碰撞点是泊车路径中与目标碰撞点对应的目标位置点,将与目标碰撞点对应的目标位置点速度设置为预设速度;其中,目标碰撞点为第一个碰撞点和最后一个碰撞点中的至少一者,第一个碰撞点对应的目标位置点为起点,第一个碰撞点对应的目标位置点速度为起点速度,最后一个碰撞点对应的目标位置点为终点,最后一个碰撞点对应的目标位置点速度为终点速度。
18、为解决上述技术问题,本技术第二方面提供了一种电子设备,该电子设备包括相互耦接的存储器和处理器,存储器存储有程序指令;处理器用于执行存储器中存储的程序指令,以实现上述第一方面提供的方法。
19、为解决上述技术问题,本技术第三方面提供了一种计算机可读存储介质,该计算机可读存储介质用于存储程序指令,程序指令能够被执行以实现上述第一方面提供的方法
20、本技术的有益效果是:区别于现有技术的情况,本技术获取泊车路径的至少一路径段的限制速度,以及至少一路径段的速度影响因子,其中,速度影响因子包括曲率信息或障碍物比例因子,障碍物比例因子表征障碍物对限制速度的影响程度;分别基于各路径段的速度影响因子,对各路径段的限制速度进行调整,以得到各路径段的最大行驶速度;至少基于各路径段的最大行驶速度,确定车辆在各路径段的目标行驶速度。通过利用速度影响因子对限制速度进行调整,可以将限制速度控制在合理的速度范围内,以提高目标行驶速度的准确性,避免限制速度过大而造成目标行驶速度过大的情况;通过提高目标行驶速度的准确性,即可提高泊车过程安全性和用户舒适度。
- 还没有人留言评论。精彩留言会获得点赞!