一种电动拖拉机前后轴双耦合动力系统及控制方法
本发明涉及电动拖拉机领域,具体涉及一种前后轴双动力耦合的动力系统。
背景技术:
1、近年来,在绿色、节能、环保的理念和国家及相关部门的大力支持下,我国农业装备正向电动化和智能化转型,尤其是拖拉机正在由传统燃油驱动向纯电、柴电混合、氢燃料电池等新能源驱动转型。
2、拖拉机在进行田间作业时,车速范围宽,传统燃油拖拉机通常选择增加变速箱的挡位来提高燃油效率,这使得驾驶员的操作复杂,增加了驾驶员的作业强度。而电机调速范围宽、高效区间广的优点,对提高拖拉机的驱动效率和能耗经济性具有巨大潜力。
3、目前,纯电动拖拉机的动力系统主要由单电机、双电机或四电机驱动。由于拖拉机作业工况种类多、作业环境复杂,要求动力系统具备多种动力分配模式。单电机驱动的电动拖拉机难以满足多工况、多输出的复杂田间作业要求,且电机在拖拉机作业过程中常处于低效率区间内;双电机驱动的拖拉机动力系统目前主要有后轮轮边驱动构型和后轮双电机耦合驱动构型,这两种构型下整机的动力性和效率有所提高,但依旧只依靠后轮驱动,拖拉机前轮的驱动能力没有得到发挥;四电机驱动的电动拖拉机主要采用四轮轮边驱动构型,拖拉机的驱动能力得到提高,但是拖拉机的动力输出轴仍需要额外的动力输入。因此,结合多电机驱动动力系统的优良特性,亟需开发一种多电机功率分汇流动力系统。
技术实现思路
1、本发明的主要目的是为了克服现有技术的不足,提出一种电动拖拉机前后轴双耦合动力系统。本发明的四电机驱动动力系统可大幅提高驱动系统的自由度,依靠作业模式划分参与工作的电机使得各电机的动力得到合理分配,在保证整机动力性的同时能有效控制整机运行效率。通过对各电机功率流的合理分配,旨在提高拖拉机的作业精度,适合应用于中大马力电动拖拉机。
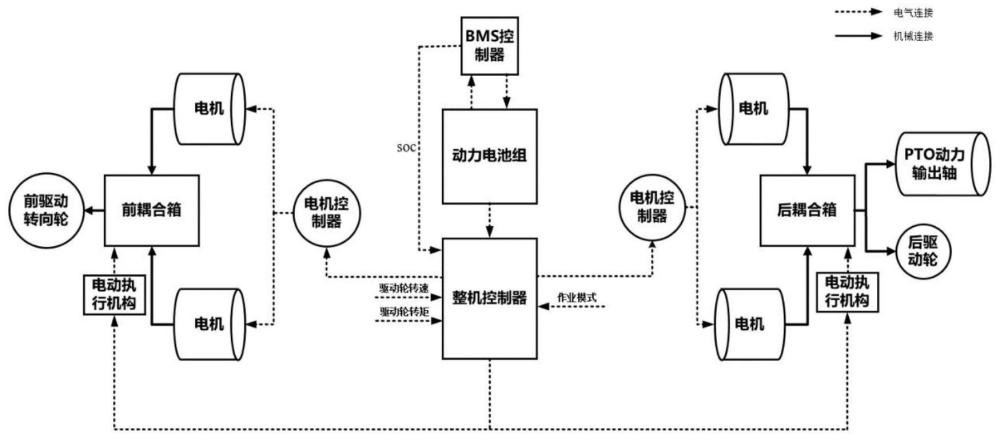
2、本系统包括后驱动轮,前侧电机控制器,动力电池,整车控制器,后侧电机控制器,前耦合箱,前驱动转向轮,后耦合箱;
3、所述前耦合箱安装于前车架上,所述后耦合箱安装于后车架上;第一永磁同步电机和第二永磁同步电机分别安装在第一行星减速机、第二行星减速机后通过法兰盘安装于后耦合箱的动力输入轴端;第三永磁同步电机和第四永磁同步电机通过法兰盘安装于前耦合箱的动力输入轴端;后耦合箱输出的动力用于驱动后驱动轮、pto动力输出轴工作;前耦合箱输出的动力用于驱动两个前驱动转向轮工作;
4、所述后侧电机控制器和前侧电机控制器均为一拖二电机控制器,后侧电机控制器布置于车架上的第一永磁同步电机和第二永磁同步电机中间,前侧电机控制器布置于前耦合箱上部;所述后侧电机控制器和前侧电机控制器通过接收整车控制器的指令控制相应永磁同步电机的工作。
5、在上述方案的基础上,本系统还包括bms控制器;
6、所述bms控制器一方面用于实时监测动力电池的状态信息,在电池出现热失控、短路、漏液等安全事故前,及时中断其工作;另一方面用于将电池的soc以及电池的实时放电功率传输给整车控制器;
7、所述整车控制器通过采集的各轮转速、转矩,结合动力电池组的soc和当前的作业模式,计算整机需求转矩并实时计算整机最优功率分配和驱动模式;
8、其一,将计算的整机最优功率分配输入所述后侧电机控制器和前侧电机控制器,控制各永磁同步电机完成相应的动作;
9、其二,控制所述后耦合箱完成电磁离合器分离或接合且控制电动执行机构实现滑移齿轮接合高档位、低档位或空挡位。
10、在上述方案的基础上,所述前耦合箱包括:第三动力输入轴,第一滑移齿轮,第二电动执行机构,第十三齿轮,第十四齿轮,第二中间轴,第三中间轴,第三制动器,第三最终传动主动齿轮,第三后桥轴,第三最终传动从动齿轮,第三半轴,第四动力输入轴,第二滑移齿轮,第三电动执行机构,第十七齿轮,第十五齿轮,第十六齿轮,第十八齿轮,差速器主动齿轮,第二差速器壳,第四制动器,第四最终传动主动齿轮,第四后桥轴,第四差速器从动齿轮,第四最终传动从动齿轮,第四半轴;
11、所述第三永磁同步电机与第三动力输入轴连接,第四永磁同步电机与第四动力输入轴连接;
12、所述第一滑移齿轮和第二滑移齿轮在第二电动执行机构和第三电动执行机构的推动下分别接合高速挡位、低速挡位或空档位;
13、所述永磁同步电机的动力经滑移齿轮和选择的挡位齿轮后,传动到第二中间轴,进而经第十七齿轮和第十八齿轮啮合传动后传动到第三中间轴,进而经差速器主动齿轮和第二差速器从动齿轮的啮合带动第二差速器壳后将动力分别传动至第三后桥轴和第四后桥轴;
14、所述第三后桥轴的动力经第三最终传动主动齿轮和第三最终传动从动齿轮啮合减速后,进一步增加传动系的传动比,使传动到第三半轴的动力满足所需的驱动力;
15、所述第四后桥轴的动力经第四最终传动主动齿轮和第四最终传动从动齿轮啮合减速后传到第四半轴,最终传动到驱动轮。
16、在上述方案的基础上,所述后耦合箱包括:第一动力输入轴,第二齿轮,第一啮合套,第一齿轮,传动套筒,湿式多片电磁离合器,中间轴,第七齿轮,变速箱输出轴,第八齿轮,锥齿轮,第一制动器,第一后桥轴,第一最终传动主动齿轮,从动锥齿轮,第一半轴,第一最终传动从动齿轮,第二动力输入轴,第三齿轮,第四齿轮,pto第一轴,第一中间轴,第五齿轮,第六齿轮,第一滑移齿轮,第一电动执行机构,第二啮合套,pto第二轴,第一差速器壳,第二制动器,第二最终传动主动齿轮,第二后桥轴,第二最终传动从动齿轮,第二半轴,第十一齿轮,第十齿轮,第九齿轮,pto动力输出轴;
17、所述第一永磁同步电机的动力经第一行星减速机后传动到第一动力输入轴;
18、所述第二永磁同步电机的动力经第二行星减速机后传动到第二动力输入轴;
19、所述第一啮合套用于选择是否将第一动力输入轴的动力传动到传动套筒;
20、所述第二啮合套用于选择是否将pto第一轴的动力传动到pto第二轴;
21、所述滑移齿轮在第一电动执行机构的推动下分别可接合高速挡位、低速挡位或空档位;
22、所述湿式多片电磁离合器用于将中间轴和传动套筒的扭矩进行分离、接合,第一中间轴的一部分伸入传动套筒内并用深沟球轴承进行支承,标记为中间轴;
23、所述第一永磁同步电机的动力经行星减速机、第一齿轮和第二齿轮啮合后传动到传动套筒,经第三齿轮和第四齿轮啮合后将动力传动到pto第一轴,进而经啮合套、pto第二轴后传动到第九齿轮,最后经第十齿轮、第十一齿轮后传动到pto动力输出轴驱动pto作业;
24、第二永磁同步电机的动力经第二行星减速机、第六齿轮和第五齿轮啮合后传动到中间轴上,经滑移齿轮选择的挡位后将动力传动到变速箱输出轴上,进而驱动锥齿轮和从动锥齿轮啮合将动力传动到第一差速器壳上,动力经差速器分流后传动到最终传动部分,经两侧的最终传动主动齿轮和最终传动从动齿轮后驱动拖拉机行走。
25、在上述方案的基础上,所述第一行星减速机、第二行星减速机的传动比均为3。
26、第二方面,提供一种电动拖拉机,安装有一种电动拖拉机前后轴双耦合动力系统,所述拖拉机的四个驱动轮安装于半轴两侧,且前轮同时为转向轮。
27、第三方面,提出一种电动拖拉机控制方法,基于一种电动拖拉机前后轴双耦合动力系统,用于实现田间牵引作业下前后轴之间的转矩分配,包括下述步骤:
28、将每一时刻拖拉机所需挂钩牵引力对应为拖拉机需求转矩;
29、定义k为前轴所需转矩与总目标转矩的比例,拖拉机前轴所需转矩为tf,拖拉机后轴所需转矩为tr;
30、推倒出电机在特定拖拉机需求转矩ts下的综合损耗ploss为关于转矩分配系数k的凹函数;
31、基于黄金比例搜索算法,求得特定需求转矩ts时,使ploss取得极小值的转矩分配系数k*。
32、在上述方案的基础上,所述黄金比例搜索算法具体为:
33、确定初始搜索范围以及收敛的精度ε;
34、根据算式计算插入点和总损耗函数值,并进行比较;
35、根据比较结果,缩小搜索范围;
36、检验区间是否满足收敛的条件;
37、输出最佳转矩分配系数k*。
38、本发明的有益效果:
39、①四电机前后轴双耦合动力系统不同电机的间配合有效增加了驱动系统的自由度,驱动系统的高效率区间域增大,为电动拖拉机工作在高效工况提供了更多可能;
40、②驱动系统的两个耦合箱前后布置,动力传动行程短,传动效率高且动力输出的精确性和稳定性高;
41、③基于作业模式优化动力系统驱动模式和功率流向,使拖拉机动力输出特性与作业负载特性得到良好匹配。
- 还没有人留言评论。精彩留言会获得点赞!