能量回收控制方法、装置、设备及存储介质与流程
本申请涉及车辆控制,尤其涉及一种能量回收控制方法、装置、设备及存储介质。
背景技术:
1、随着电动车辆的普及,电动车辆在生活中使用越来越普遍。由于电动车辆的续航普遍较短,为了尽可能的提高续航水平,能量回收一直是电动车辆延长续航的标配功能。
2、相关技术中,整车出厂后的制动性能恒定,为了追求续航水平的提升,通常设置较大的能量回收强度。然而,较大的能量回收强度会降低车辆的舒适性,尤其在车辆空载时。
技术实现思路
1、本申请提供一种能量回收控制方法、装置、设备及存储介质,用以满足车辆续航的同时,提高车辆的舒适性。
2、第一方面,本申请提供一种能量回收控制方法,包括:
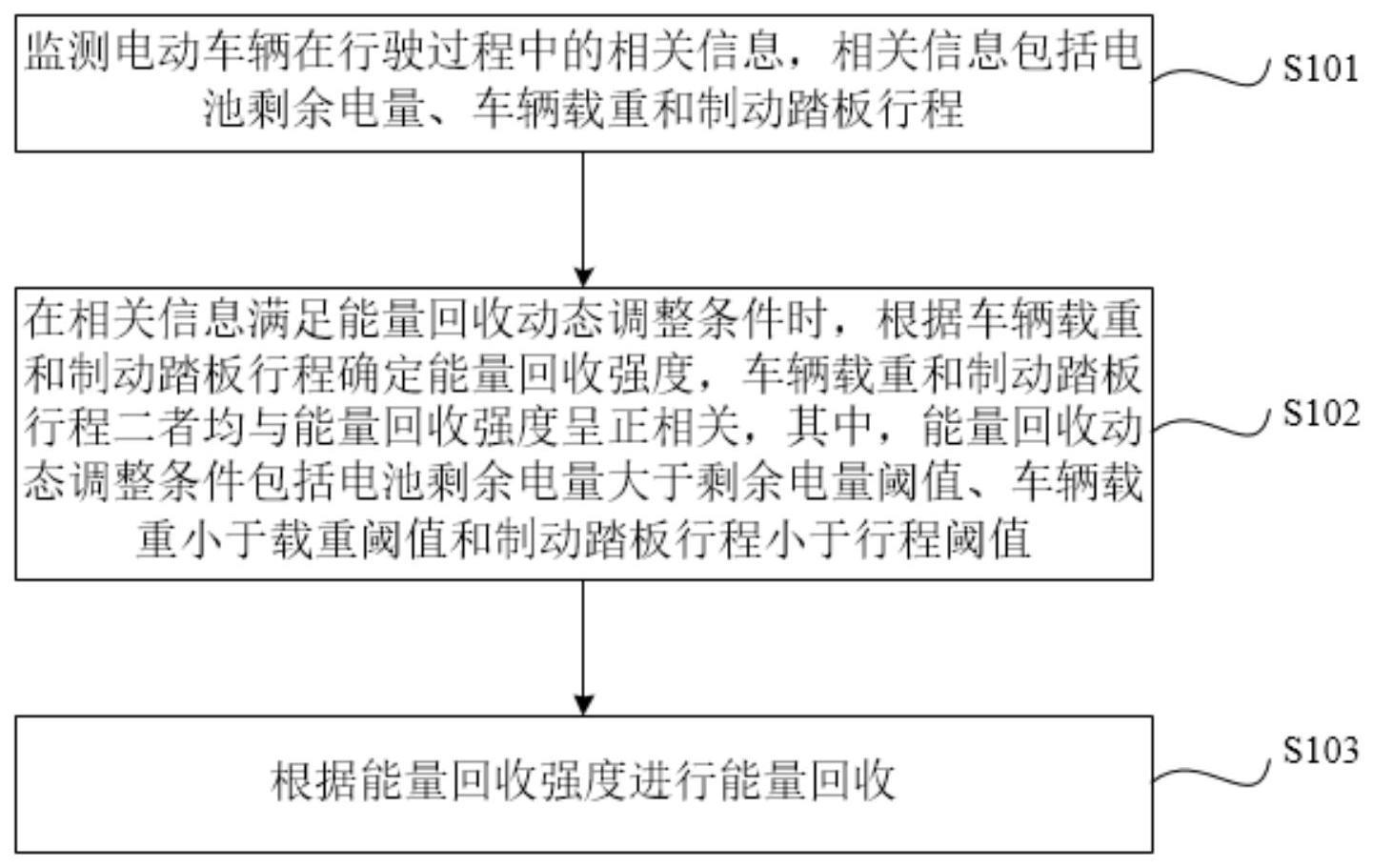
3、监测电动车辆在行驶过程中的相关信息,相关信息包括电池剩余电量、车辆载重和制动踏板行程;
4、在相关信息满足能量回收动态调整条件时,根据车辆载重和制动踏板行程确定能量回收强度,车辆载重和制动踏板行程二者均与能量回收强度呈正相关,其中,能量回收动态调整条件包括电池剩余电量大于剩余电量阈值、车辆载重小于载重阈值和制动踏板行程小于行程阈值;
5、根据能量回收强度进行能量回收。
6、在一种可能的实施方式中,制动回收的扭矩可反映能量回收强度,根据车辆载重和制动踏板行程确定能量回收强度,包括:根据如下公式确定制动回收的扭矩:
7、t=v1*t1+v2*t2
8、其中,t表示制动回收的扭矩,v1表示制动踏板行程的权重,v2表示车辆载重的权重,t1表示制动踏板行程对应的回收扭矩,t2表示车辆载重对应的回收扭矩t2。
9、在一种可能的实施方式中,v1与v2之和为预设值,预设值包括1。
10、在一种可能的实施方式中,上述在相关信息满足能量回收动态调整条件时,根据车辆载重和制动踏板行程确定能量回收强度,包括:在相关信息满足能量回收动态调整条件时,且持续时长大于或等于时长阈值,根据车辆载重和制动踏板行程确定能量回收强度。
11、在一种可能的实施方式中,能量回收控制方法,还包括:若制动踏板未被踩下,则基于预先标定的能量回收等级与车辆载重的对应关系,确定车辆载重对应的目标能量回收等级;基于目标能量回收等级下的制动力矩关系表,查询得到车速对应的制动回收的扭矩,制动力矩关系表是预先标定得到车速与制动回收的扭矩的关系。
12、在一种可能的实施方式中,能量回收控制方法,还包括:在相关信息不满足能量回收动态调整条件时,或,在相关信息满足能量回收动态调整条件且持续时长小于时长阈值时,确定能量回收强度为电动车辆允许的最大能量回收强度;根据最大能量回收强度进行能量回收。
13、在一种可能的实施方式中,根据车辆载重和制动踏板行程确定能量回收强度,包括:确定车辆的制动踏板是否被踩下;若制动踏板被踩下,则根据车辆载重和制动踏板行程确定能量回收强度。
14、第二方面,本申请提供一种能量回收控制装置,包括:
15、监测模块,用于监测电动车辆在行驶过程中的相关信息,相关信息包括电池剩余电量、车辆载重和制动踏板行程;
16、确定模块,用于在相关信息满足能量回收动态调整条件时,根据车辆载重和制动踏板行程确定能量回收强度,车辆载重和制动踏板行程二者均与能量回收强度呈正相关,其中,能量回收动态调整条件包括电池剩余电量大于剩余电量阈值、车辆载重小于载重阈值和制动踏板行程小于行程阈值;
17、回收模块,用于根据能量回收强度进行能量回收。
18、在一种可能的实施方式中,制动回收的扭矩可反映能量回收强度,确定模块可以具体用于:根据如下公式确定制动回收的扭矩:
19、t=v1*t1+v2*t2
20、其中,t表示制动回收的扭矩,v1表示制动踏板行程的权重,v2表示车辆载重的权重,t1表示制动踏板行程对应的回收扭矩,t2表示车辆载重对应的回收扭矩t2。
21、在一种可能的实施方式中,v1与v2之和为预设值,预设值包括1。
22、在一种可能的实施方式中,确定模块可以具体用于:在相关信息满足能量回收动态调整条件,且持续时长大于或等于时长阈值时,根据车辆载重和制动踏板行程确定能量回收强度。
23、在一种可能的实施方式中,确定模块还用于:若制动踏板未被踩下,则基于预先标定的能量回收等级与车辆载重的对应关系,确定车辆载重对应的目标能量回收等级;基于目标能量回收等级下的制动力矩关系表,查询得到车速对应的制动回收的扭矩,制动力矩关系表是预先标定得到车速与制动回收的扭矩的关系。
24、在一种可能的实施方式中,确定模块还可以用于:在相关信息不满足能量回收动态调整条件时,或,在相关信息满足能量回收动态调整条件且持续时长小于时长阈值时,确定能量回收强度为电动车辆允许的最大能量回收强度;回收模块还用于:根据最大能量回收强度进行能量回收。
25、在一种可能的实施方式中,确定模块还用于:确定车辆的制动踏板是否被踩下;若制动踏板被踩下,则根据车辆载重和制动踏板行程确定能量回收强度。
26、第三方面,本申请提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
27、存储器存储计算机执行指令;
28、处理器执行计算机执行指令,使得处理器执行第一方面任一项所述的能量回收控制方法。
29、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被执行时,实现如第一方面任一项所述的能量回收控制方法。
30、第五方面,本申请提供一种计算机程序产品,包括计算机程序,所述计算机程序被执行时实现如第一方面任一项所述的能量回收控制方法。
31、本申请提供的能量回收控制方法、装置、设备及存储介质,实时监测电动车辆在行驶过程中的相关信息,相关信息包括电池剩余电量、车辆载重和制动踏板行程,考虑多方面因素对车辆能量回收控制的影响;在相关信息满足能量回收动态调整条件时,能量回收动态调整条件包括电池剩余电量大于剩余电量阈值、车辆载重小于载重阈值和制动踏板行程小于行程阈值;根据车辆载重和制动踏板行程动态确定能量回收强度,根据该能量回收强度进行能量回收。其中,车辆载重和制动踏板行程二者均与能量回收强度呈正相关,可以理解车辆载重和制动踏板行程二者较小时,能量回收强度较小,考虑驾驶舒适性;车辆载重和制动踏板行程二者较大时,能量回收强度较大,制动及能量回收强度优先,从而实现根据不同能量回收强度进行能量回收,解决了车辆普遍在空载情况下能量回收强度过大舒适性较差的问题,同时尽可能利用能量回收功能,延长整车的续航水平。
技术特征:
1.一种能量回收控制方法,其特征在于,包括:
2.根据权利要求1所述的能量回收控制方法,其特征在于,制动回收的扭矩可反映能量回收强度,所述根据所述车辆载重和所述制动踏板行程确定能量回收强度,包括:
3.根据权利要求2所述的能量回收控制方法,其特征在于,v1与v2之和为预设值,所述预设值包括1。
4.根据权利要求1至3中任一项所述的能量回收控制方法,其特征在于,所述在所述相关信息满足能量回收动态调整条件时,根据所述车辆载重和所述制动踏板行程确定能量回收强度,包括:
5.根据权利要求4所述的能量回收控制方法,其特征在于,还包括:
6.根据权利要求1至3中任一项所述的能量回收控制方法,其特征在于,所述根据所述车辆载重和所述制动踏板行程确定能量回收强度,包括:
7.根据权利要求6所述的能量回收控制方法,其特征在于,还包括:
8.一种能量回收控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被执行时用于实现如权利要求1至7中任一项所述的方法。
技术总结
本申请提供一种能量回收控制方法、装置、设备及存储介质。监测电动车辆在行驶过程中的相关信息,相关信息包括电池剩余电量、车辆载重和制动踏板行程,考虑多方面因素对车辆能量回收控制的影响;在相关信息满足能量回收动态调整条件时,根据车辆载重和制动踏板行程确定能量回收强度,车辆载重和制动踏板行程二者均与能量回收强度呈正相关,能量回收动态调整条件包括电池剩余电量大于剩余电量阈值、车辆载重小于载重阈值和制动踏板行程小于行程阈值;根据能量回收强度进行能量回收。通过动态调整能量回收强度的方式,保证车辆续航水平的同时,提高车辆驾驶的舒适性,尤其适用车辆空载情况。
技术研发人员:李国志,郭永斌,孙昊
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!