一种基于双目视觉的车用智能限高防撞装置及其方法与流程
本发明涉及车用智能辅助驾驶领域,具体是一种基于双目视觉的车用智能限高防撞装置及其方法。
背景技术:
1、随着人们生活水平的不断提升和旅游观光的兴起,房车旅游逐渐成为一种重要的旅游方式和生活方式,尤其在欧美和澳洲等地已经发展成为一个非常成熟的产业。房车的特点是它可以提供住宿、厨房、卫浴等齐全的生活设施,并可以在旅游过程中随时停靠下来,为旅客带来极大的灵活性和便利性。
2、然而,在房车旅游中,车辆限高问题一直是一个非常棘手的问题。由于路线不同、地区不同,不同国家和地区的限高标准也大不相同,如果房车的高度超过了限高标准,就很容易发生严重的撞车事故。因此,房车上限高产品的开发是比较有必要和市场需求的。
3、房车上限高产品的主要作用是,通过精准定位的双目摄像头采集车辆行驶轨迹方向上的视觉点云数据,传递给中央图像处理器,根据双目视觉方法,当判断出前方障碍将对车辆行驶产生安全威胁时,中央图像处理器发出信号及时通过车载视觉、听觉hmi为驾驶员提示前方限高预警,避免发生撞车事故。
技术实现思路
1、本发明的目的在于提供一种基于双目视觉的车用智能限高防撞装置及其方法,以解决现有技术中的问题。
2、为实现上述目的,本发明提供了一种基于双目视觉的车用智能限高防撞装置,包括双目摄像头总成、底座和线束装饰罩,
3、所述双目摄像头总成包括主定位安装基座、双目摄像头、散热翅片、散热执行器风扇、散热翅片、can接口,
4、所述双目摄像头设置于底座内,并通过can接口与汽车电连接,
5、所述散热翅片设置于主定位安装基座一侧,所述散热执行器风扇安装于散热翅片内,
6、本系统具备主动式热管理系统,有效控制设备在最佳工作温度;
7、所述主定位安装基座一侧设置有卡榫,
8、所述底座通过卡榫与主定位安装基座连接,
9、所述线束装饰罩安装于底座上,所述线束装饰罩内设置有线束定位卡槽,
10、座通过聚氨酯胶粘接在车辆前挡风玻璃工作位置上,双目智能限高防撞摄像头带控制器总成通过主定位安装卡接结构与底座进行安装,底座主定位安装卡接结构设置定位防脱落结构,安装精确牢固;
11、本系统采用快速卡接安装结构,安装在前挡风窗玻璃支架上,设有快速定位导向暗装机构,平均安装速度只需1.5s,可以实现快速安装,定位精准。并设置防脱机构,安装可靠;
12、所述双目摄像头通过遮光海绵设置于底座内;本系统具备路面预瞄能力,可拓展路面路况快速扫描,并发出实际路面情况给整车系统。
13、所述线束装饰罩与水平地面夹角为45°,所述线束装饰罩安装面与底座齐平;
14、本系统采用摄像头与中央处理器一体化高度集成化设计,节约空间,节省了高清视频传输线路成本及布置开发工作,可以快速在类似倾角前挡风车型上快速适配。
15、所述双目摄像头总成还包括设置于主定位安装基座两侧的视频外接接口和语音提示喇叭。
16、所述主定位安装基座上设置有与底座固定连接的导向定位销,所述底座通过导向定位销安装于主定位安装基座另一侧。
17、一种基于双目视觉的车用智能限高防撞方法,包括以下步骤:
18、s1:信息设定采集:应用层设置相机参数、深度学习执行硬件参数,设置图像以及图像上的工作识别区域,并反馈至总成标定程序和限高模块;
19、s2:总成标定:双目智能限高防撞摄像头带控制器总成与安装底座在目标车辆上安装后,进行自标定,校正畸变;
20、s3:限高模块进行模型前处理,对图片拼接和裁剪输出工作识别区域图像,并进行前向推理;
21、s4:限高模块进行模型后处理,输出路面类型结果及类别置信度,根据车辆写入的车宽车高信息,结合车辆偏航旅,实时判断车辆轨迹并监控车辆轨迹方向上的限高障碍物;
22、s5:应用层将限高结果封装成can报文和tcp消息发出,通过车载视觉听觉hmi为驾驶员提供前方道路限高情况预警,避免发生高度方向上的碰撞伤害。
23、步骤s1中,还包括如下步骤:
24、总成标定使用黑白棋盘格标定板,布置在指定位置,车辆停在指定定位位置,标定触发使用组合操作信号,具体为:
25、a1、车辆熄火后上电,油门踏板和制动踏板踩到底,同时拨动6次右转向灯灯开关(右转-中位-右转-中位-右转-中位),
26、a2、完成后松开油门和制动踏板,双目智能限高防撞摄像头带控制器总成收到该组合操作信号后,进入自标定模式并发出进入标定模式信号,车辆仪表弹屏“智能限高装置进入标定模式”;
27、a3、控制器根据摄像头采集到的车辆与标靶的相对位置信息,应用层自动设置相机参数;
28、a4、自标定模块返回成功,应用层提供自标定所需图像;
29、a5、自标定模块进行检测,如果当前环境适合进行标定则计算得到标定数据,如果不适合则继续监测;
30、a6、如果生成标定数据则应用层将标定数据保存到指定位置;
31、a7、发送标定成功信号,车辆仪表弹屏“智能限高装置标定成功”。
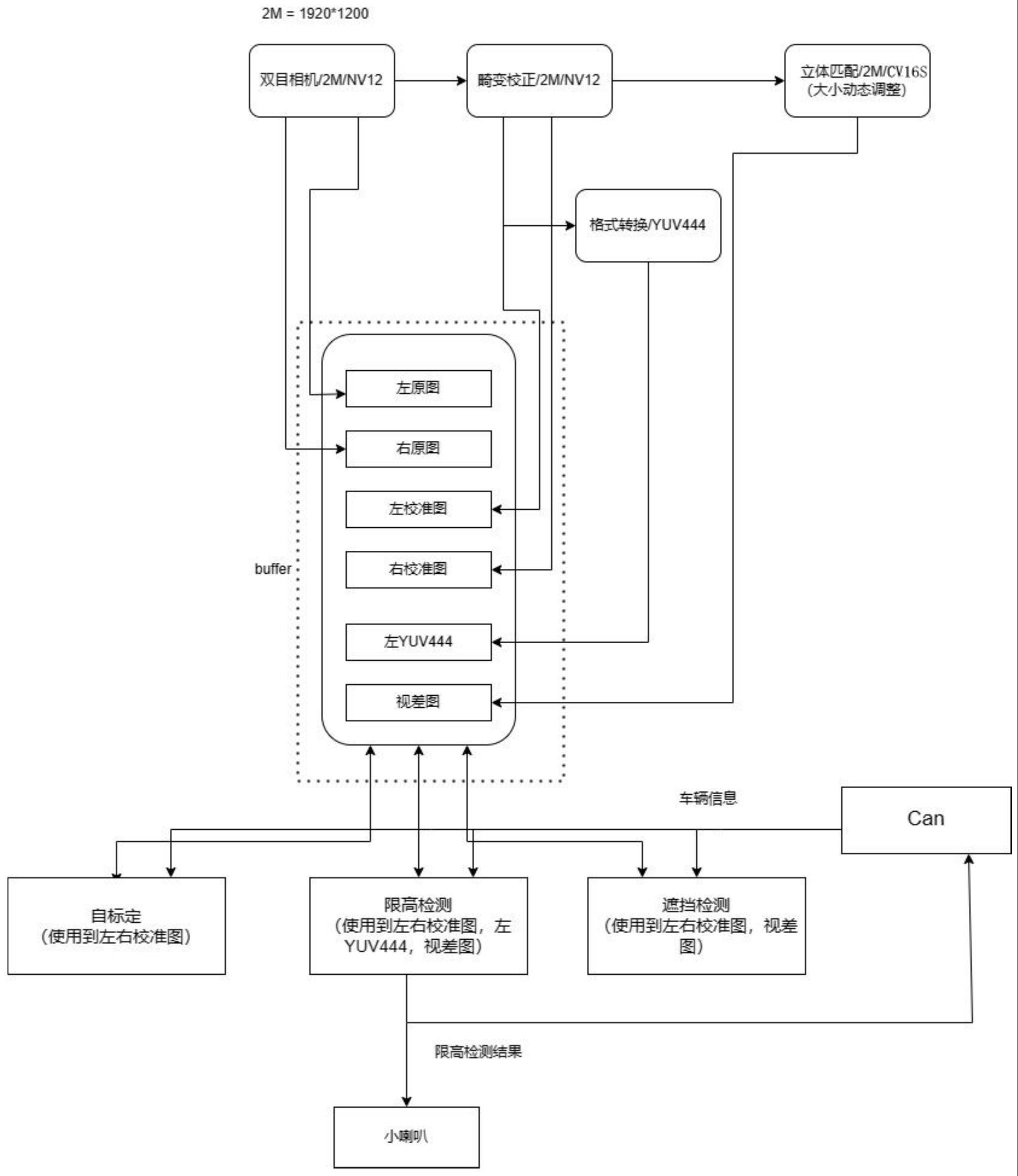
32、步骤s4中,还包括如下步骤:
33、b1:双目相机输出左右原图,通过校正得到左右校准图,反馈至总成标定程序;
34、b2:双目相机输出左右原图,通过转换格式和立体匹配,得到yuv444和视差图,反馈至限高模块,并检测遮挡。
35、步骤s4中,限高模块反馈限高预警时,控制器保存预警图像,调用存储视频接口对预警视频进行存储。
36、控制器设置主动温度管理控制,检测到温度超高时,开启散热风扇,温度管理控制采用pid控制,根据检测到的控制器温度来调整风扇转速控制器。
37、与现有技术相比,本发明的有益效果为:
38、1、本发明设置横向双目布置结构,可布置在车内前挡风玻璃区域,采用双目摄像头与控制器一体结构,节约空间、紧凑,不影响改装车型;
39、2、采用主动温度管理控制,检测到温度超高时,开启散热风扇,温度管理控制采用pid控制,根据检测到的控制器温度来调整风扇转速控制器;
40、3、算法先使用ai深度学习生物视觉算法,判断障碍物是刚性物体或是柔性物体,并过滤柔性物体,可实现降低对柔性非威胁物体误报概率、并降低对双目测距芯片算力需求;
41、4、控制器可输出dvr数据兼具行车记录功能;
42、5、控制器可记录预警前后15秒的视频及logging事件数据,供事件调查使用;
43、6、可采用高精度安装结构,高精度标定算法标定过程,保证动态系统工作时时:测距误差<5%,高度误差<10cm;
44、通过精准定位的双目摄像头采集车辆行驶轨迹方向上的视觉点云数据,传递给中央图像处理器,根据双目视觉方法,当判断出前方障碍将对车辆行驶产生安全威胁时,中央图像处理器发出信号及时通过车载视觉、听觉hmi为驾驶员提示前方限高预警,避免发生撞车事故。
- 还没有人留言评论。精彩留言会获得点赞!