一种主动制动方法、装置、设备及计算机可读存储介质与流程
本申请涉及车辆制动领域,具体而言,涉及一种主动制动方法、装置、设备及计算机可读存储介质。
背景技术:
1、目前,关于车辆制动,需要考虑多个方面的因素来实现良好的制动效果和驾驶体验。首先,制动过程中需要考虑车身的稳定性和最大制动力矩,以避免驾驶员产生晕车感。其次,为了确保安全性,需要有足够的制动距离。这是制动装置的主要目标之一。
2、然而,在实际驾驶中,车辆的制动装置主要依赖于驾驶员的驾驶意图,驾驶员识别紧急制动,并采取行动,到制动装置响应中间花费了无效时间,导致制动距离长,并且紧急制动可能产生晕车感,制动体验差。
技术实现思路
1、本申请的目的在于克服现有技术中制动距离长,并且紧急制动可能产生晕车感的缺陷,提供一种主动制动方法、装置、设备及一种计算机可读存储介质。
2、本申请提供的一种主动制动方法,包括:
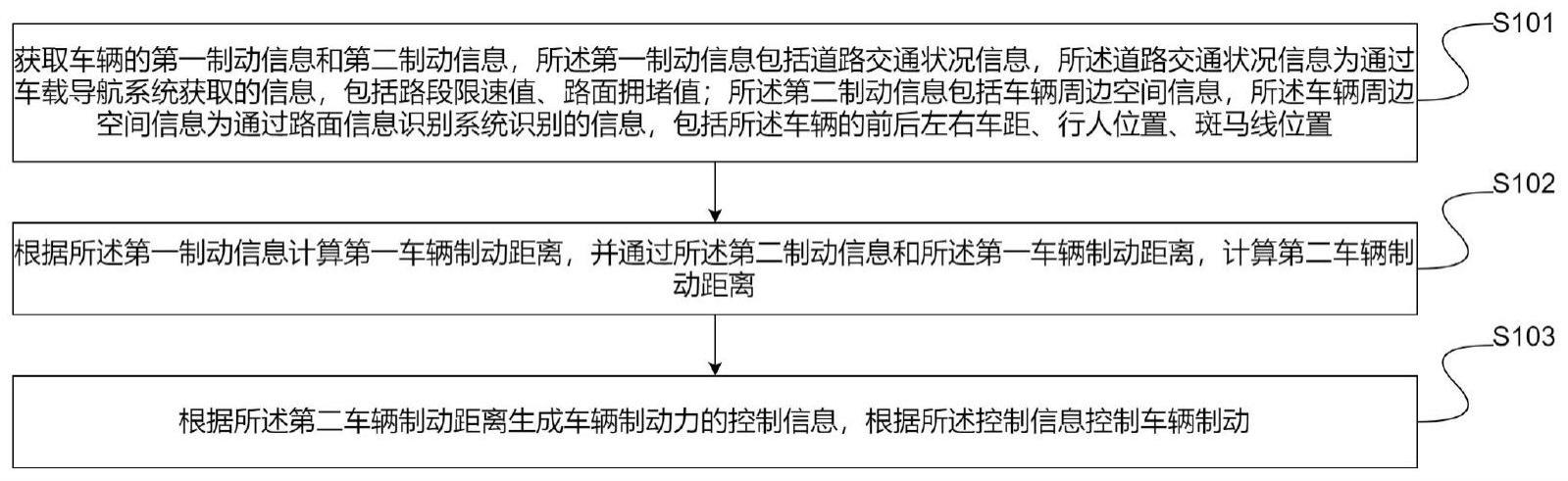
3、获取车辆的第一制动信息和第二制动信息,所述第一制动信息包括道路交通状况信息,所述道路交通状况信息为通过车载导航系统获取的信息,包括路段限速值、路面拥堵值;所述第二制动信息包括车辆周边空间信息,所述车辆周边空间信息为通过路面信息识别系统识别的信息,包括所述车辆的前后左右车距、行人位置、斑马线位置;
4、根据所述第一制动信息计算第一车辆制动距离,并通过所述第二制动信息和所述第一车辆制动距离,计算第二车辆制动距离;
5、根据所述第二车辆制动距离生成车辆制动力的控制信息,根据所述控制信息控制车辆制动。
6、可选地,所述计算第二车辆制动距离,包括:
7、根据第二制动信息计算的制动距离与所述第一制动距离比较,将两者中短的制动距离确定为所述第二车辆制动距离。
8、可选地,所述根据所述控制信息控制车辆制动,包括:
9、获取所述控制信息中的车辆制动力区间;
10、将所述车辆制动力区间和预设的晕车制动力进行比较,选择低于所述晕车制动力的所述车辆制动力进行车辆制动。
11、可选地,所述根据所述控制信息控制车辆制动,包括:
12、获取所述控制信息中的车辆制动力区间;
13、将所述车辆制动力区间与所述车辆的实际制动力进行比较,当所述实际制动力小于所述车辆制动力区间的最小值,采用所述实际制动力进行车辆制动。
14、可选地,所述根据所述控制信息控制车辆制动,包括:
15、获取车辆的加速度;
16、根据所述加速度和所述第二车辆制动距离,更新所述控制信息,根据更新后的所述控制信息控制车辆制动。
17、可选地,所述第一制动信息还包括红绿灯状态信息;
18、判断所述车辆行驶到路口时的红绿灯状态;
19、若所述红绿灯状态为红或者黄,则根据所述控制信息进行车辆制动,否则不进行制动。
20、可选地,所述根据所述控制信息控制车辆制动,包括:
21、根据所述控制信息中的车辆制动力区间,计算制动踏板的踏板深度对应的车辆制动力大小。
22、可选地,所述根据所述控制信息控制车辆制动,包括:
23、采用能量回收装置提供车辆制动力。
24、本申请还提供一种主动制动装置,包括获取模块,处理模块和制动模块;
25、所述获取模块,用于获取车辆的第一制动信息和第二制动信息,所述第一制动信息包括道路交通状况信息,所述道路交通状况信息为通过车载导航系统获取的信息,包括路段限速值、路面拥堵值;所述第二制动信息包括车辆周边空间信息,所述车辆周边空间信息为通过路面信息识别系统识别的信息,包括所述车辆的前后左右车距、行人位置、斑马线位置;
26、所述处理模块,用于根据所述第一制动信息计算第一车辆制动距离,并通过所述第二制动信息和所述第一车辆制动距离,计算第二车辆制动距离;
27、根据所述第二车辆制动距离生成车辆制动力的控制信息;
28、所述制动模块,用于根据所述控制信息控制车辆制动。
29、本申请还提供一种电子设备,其特征在于,所述电子设备包括:
30、处理器和存储器;
31、所述处理器通过调用所述存储器存储的程序或指令,用于执行上述的主动制动方法的步骤。
32、本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的所述主动制动方法的步骤。
33、本申请的优点和有益效果:
34、本申请提供的一种主动制动方法,包括:获取车辆的第一制动信息和第二制动信息,所述第一制动信息包括道路交通状况信息,所述道路交通状况信息为通过车载导航系统获取的信息,包括路段限速值、路面拥堵值;所述第二制动信息包括车辆周边空间信息,所述车辆周边空间信息为通过路面信息识别系统识别的信息,包括所述车辆的前后左右车距、行人位置、斑马线位置;根据所述第一制动信息计算第一车辆制动距离,并通过所述第二制动信息和所述第一车辆制动距离,计算第二车辆制动距离;根据所述第二车辆制动距离生成车辆制动力的控制信息,根据所述控制信息控制车辆制动。本申请根据道路交通状况确定第一制车辆动距离,再根据车辆周边空间的识别结果结合第一车辆制动距离确定第二制动距离,从而提高了制动信息的准确性。
35、进一步的,根据所述第二车辆制动信息生成制动信息进行主动制动,减少了制动过程中驾驶员从识别紧急制动到制动装置响应所花费的无效时间,减少需要的安全制动距离,提升安全性。
36、本申请还通过将所述车辆制动力与晕车制动力比较,选择低于所述晕车制动力的车辆制动力进行制动,避免产出晕车感觉。
技术特征:
1.一种主动制动方法,其特征在于,包括:
2.根据权利要求1所述主动制动方法,其特征在于,所述计算第二车辆制动距离,包括:
3.根据权利要求1所述主动制动方法,其特征在于,所述根据所述控制信息控制车辆制动,包括:
4.根据权利要求1所述主动制动方法,其特征在于,所述根据所述控制信息控制车辆制动,包括:
5.根据权利要求1所述主动制动方法,其特征在于,所述根据所述控制信息控制车辆制动,包括:
6.根据权利要求1所述主动制动方法,其特征在于,所述第一制动信息还包括红绿灯状态信息;
7.根据权利要求1~6任一项所述主动制动方法,其特征在于,所述根据所述控制信息控制车辆制动,包括:
8.一种主动制动装置,其特征在于,包括获取模块,处理模块和制动模块;
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述主动制动方法的步骤。
技术总结
本申请涉及一种主动制动方法、装置、设备及计算机可读存储介质,属于车辆制动领域,该主动制动方法包括;获取车辆的第一制动信息和第二制动信息,所述第一制动信息包括道路交通状况信息,所述第二制动信息包括车辆周边空间信息;根据所述第一制动信息计算第一车辆制动距离,并通过所述第二制动信息和所述第一车辆制动距离,计算第二车辆制动距离;根据所述第二车辆制动距离生成车辆制动力的控制信息,根据所述控制信息控制车辆制动。本申请不仅采用道路交通状况信息,还结合车辆空间状况信息生成主动制动策略,减少了制动中驾驶员从识别紧急制动到制动装置响应所花费的无效时间,提升安全性。
技术研发人员:梁宗峰,王恒达,颜伏伍,赵健,张功
受保护的技术使用者:重庆赛力斯新能源汽车设计院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!