一种履带式工程机械直行纠偏方法、终端设备及存储介质与流程
本发明涉及车辆控制领域,尤其涉及一种履带式工程机械直行纠偏方法、终端设备及存储介质。
背景技术:
1、履带式工程机械的双边履带的同步控制可以保证其在直线行驶过程中具备抗干扰能力,在外部环境发生变化的时候,保持一定的直线度进行行驶,但是在行驶的过程中会累积横向偏差和横摆角偏差,为了能够保证履带式工程机械全自动行驶过程中不和待施工道面接触,需要对累积偏差进行消除。
技术实现思路
1、为了解决上述问题,本发明提出了一种履带式工程机械直行纠偏方法、终端设备及存储介质。
2、具体方案如下:
3、一种履带式工程机械直行纠偏方法,包括以下步骤:
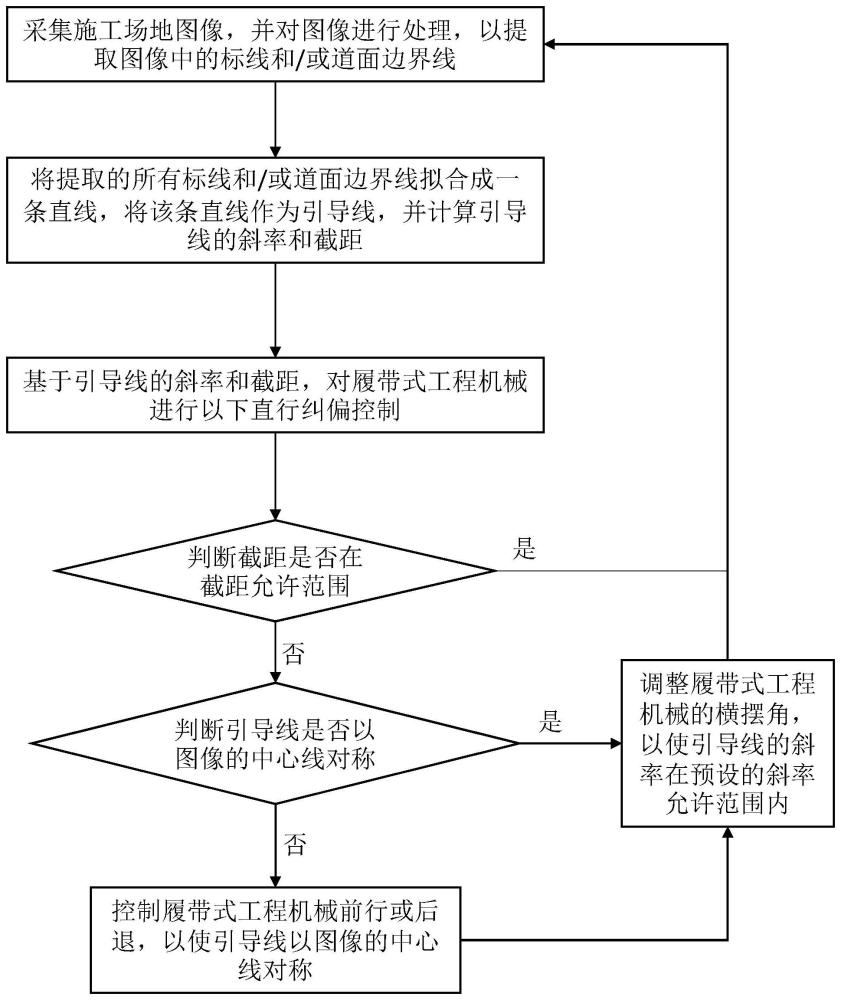
4、s1:采集施工场地图像,并对图像进行处理,以提取图像中的标线和/或道面边界线;
5、s2:将提取的所有标线和/或道面边界线拟合成一条直线,将该条直线作为引导线,并计算引导线的斜率和截距;
6、s3:基于引导线的斜率和截距,对履带式工程机械进行如下直行纠偏控制:
7、s301:判断引导线的截距是否在预设的截距允许范围内,如果是,返回s1;否则,进入s302:
8、s302:判断引导线是否相对于图像的中心线对称,如果是,进入s303;否则,进入s304;
9、s303:调整履带式工程机械的横摆角,以使引导线的斜率在预设的斜率允许范围内后,返回s1;
10、s304:控制履带式工程机械前行或后退,以使引导线相对于图像的中心线对称后,返回s303。
11、进一步的,图像的处理过程包括:首先对图像进行二值化处理,之后对二值化处理后的图像进行直线拟合,以识别图像中的标线和/或道面边界线。
12、进一步的,对图像进行二值化处理之前还包括对图像进行对比度和亮度的调整。
13、进一步的,对二值化处理后的图像进行直线拟合之前还包括:对二值化处理结果进行腐蚀目标处理;对腐蚀目标处理结果进行开操作处理;对开操作处理后的图像进行直线拟合。
14、进一步的,在腐蚀目标处理过程中,选用大小为3*3,形状为十字架的结构元素来进行腐蚀目标;开操作处理,选用大小为3*3,形状为正方形的结构元素来执行开操作。
15、进一步的,直线拟合基于labview实现,具体方法为:调用imaq imagetoarray vi从图像中提取像素到labview 2d数组中;对2d数组进行遍历,找到所有灰度值为255的点,并且将其x、y坐标记录下来,基于记录的坐标进行直线拟合。
16、进一步的,在二值化处理中选用rgb模式对红、绿、蓝三原色的阈值进行设置,三原色的阈值均在0-25之间。
17、一种履带式工程机械直行纠偏终端设备,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例上述的方法的步骤。
18、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例上述的方法的步骤。
19、本发明采用如上技术方案,基于引导线的斜率和截距实现直行纠偏控制,减少了履带式工程机械行驶时的横向误差。
技术特征:
1.一种履带式工程机械直行纠偏方法,其特征在于,包括:
2.根据权利要求1所述的履带式工程机械直行纠偏方法,其特征在于:图像的处理过程包括:首先对图像进行二值化处理,之后对二值化处理后的图像进行直线拟合,以识别图像中的标线和/或道面边界线。
3.根据权利要求2所述的履带式工程机械直行纠偏方法,其特征在于:对图像进行二值化处理之前还包括对图像进行对比度和亮度的调整。
4.根据权利要求2所述的履带式工程机械直行纠偏方法,其特征在于:对二值化处理后的图像进行直线拟合之前还包括:对二值化处理结果进行腐蚀目标处理;对腐蚀目标处理结果进行开操作处理;对开操作处理后的图像进行直线拟合。
5.根据权利要求4所述的履带式工程机械直行纠偏方法,其特征在于:在腐蚀目标处理过程中,选用大小为3*3,形状为十字架的结构元素来进行腐蚀目标;开操作处理,选用大小为3*3,形状为正方形的结构元素来执行开操作。
6.根据权利要求2所述的履带式工程机械直行纠偏方法,其特征在于:直线拟合基于labview实现,具体方法为:调用imaq imagetoarray vi从图像中提取像素到labview 2d数组中;对2d数组进行遍历,找到所有灰度值为255的点,并且将其x、y坐标记录下来,基于记录的坐标进行直线拟合。
7.根据权利要求2所述的履带式工程机械直行纠偏方法,其特征在于:在二值化处理中选用rgb模式对红、绿、蓝三原色的阈值进行设置,三原色的阈值均在0-25之间。
8.一种履带式工程机械直行纠偏终端设备,其特征在于:包括处理器、存储器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1~7中任一所述方法的步骤。
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1~7中任一所述方法的步骤。
技术总结
本发明涉及一种履带式工程机械直行纠偏方法、终端设备及存储介质,该方法中包括:采集施工场地图像,并对图像进行处理,以提取图像中的标线和/或道面边界线;将提取的所有标线和/或道面边界线拟合成一条直线,将该条直线作为引导线,并计算引导线的斜率和截距;基于引导线的斜率和截距,对履带式工程机械进行直行纠偏控制。本发明,基于引导线的斜率和截距实现直行纠偏控制,减少了履带式工程机械行驶时的横向误差。
技术研发人员:周利民,熊树生,吴霄峰,陈振华,刘如诺,黄国超,刘文涛,陈成辉,江立流,张进,童长斌,上官万春,张昶,陈敏,蔡灼平,杨名锂,潘碧云
受保护的技术使用者:中国水利水电第十六工程局有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!