车辆用控制装置、车辆控制方法及程序与流程
本发明涉及执行用于避免物体与车辆的碰撞或减轻碰撞的伤害的碰撞避免控制的车辆用控制装置、由车辆的计算机执行碰撞避免控制的车辆控制方法、以及使车辆的计算机执行碰撞避免控制的程序。
背景技术:
1、以往,执行“作为自动驾驶中的一种的碰撞避免控制”的车辆用控制装置为人所知。例如,专利文献1中记载的车辆用控制装置(以下,称为“第1现有装置”)在由雷达传感器检测到的车辆侧方的移动物体满足了碰撞条件的情况下,执行碰撞避免控制。将该碰撞避免控制称为“侧方碰撞避免控制”。
2、专利文献1中记载的雷达传感器,向车辆侧方发送毫米波(发送波),接收“该发送波在物体的反射点反射后的反射波”。然后,雷达传感器基于发送波及反射波来对物体进行识别(即,确定物体相对于车辆的位置及物体相对于车辆的相对速度)。
3、专利文献2中记载的车辆用控制装置(以下,称为“第2现有装置”)检测车辆前方的物体,在该物体满足了碰撞条件的情况下,执行碰撞避免控制。将该碰撞避免控制称为“前方碰撞避免控制”。
4、第2现有装置通过对“与由相机检测到的物体相关的第1检测信息”及“与由雷达传感器检测到的物体相关的第2检测信息”进行统合(融合),来对物体进行识别(即,确定物体相对于车辆的位置及物体相对于车辆的相对速度)(参照段落0050至0052)。
5、现有技术文献
6、专利文献
7、专利文献1:日本特开2020-12702号公报
8、专利文献2:日本特开2022-90833号公报
技术实现思路
1、第1现有装置仅使用来自雷达传感器的信息来识别物体,第2现有装置使用来自相机及雷达传感器的信息来识别物体。因而,第1现有装置的物体的识别精度比第2现有装置的识别精度低。
2、本发明人等研究了能够执行前方碰撞避免控制及侧方碰撞避免控制这两者的车辆用控制装置(以下,称为“研究装置”)。
3、研究装置基于来自侧方雷达传感器的信息来识别车辆侧方的物体,基于来自相机(摄像头)及前方雷达传感器的信息来识别车辆前方的物体。因而,车辆侧方的物体的识别精度比车辆前方的物体的识别精度低。因此,研究装置误执行(错误地执行)侧方碰撞避免控制的可能性比误执行前方碰撞避免控制的可能性高。
4、车辆的“操作者(驾驶员及远程操作员)及乘员”对像这样误执行的侧方碰撞避免控制感到厌烦的可能性高。
5、本发明是为了应对前述课题而完成的。即,本发明的目的之一在于,提供一种车辆用控制装置,能够通过减少误执行侧方碰撞避免控制的可能性来减少车辆的“操作者及乘员”对侧方碰撞避免控制感到厌烦的可能性。
6、本发明的车辆用控制装置(以下,称为“本发明装置”)具备:
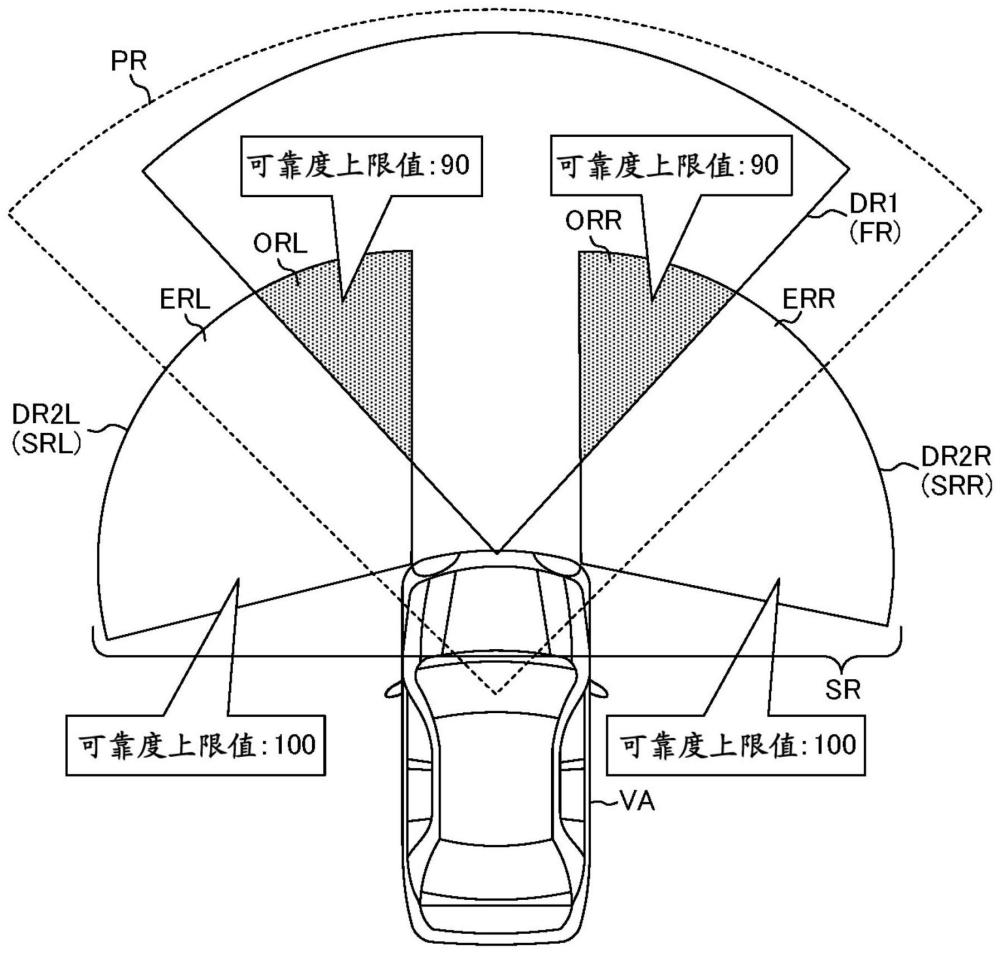
7、前方检测部(22、26、20),检测位于车辆(va)的前方的前方检测区域(fr)的物体来作为前方物体;
8、侧方检测部(24l、24r、20),检测位于侧方检测区域(sr)的物体来作为侧方物体,所述侧方检测区域(sr)是一部分重叠区域(or)与所述前方检测区域重叠且位于所述车辆的侧方的区域;以及
9、控制部(20、30、40、50),在所述前方物体满足了预定的前方碰撞条件的情况下执行用于避免所述前方物体与所述车辆的碰撞或减轻所述碰撞的伤害的前方碰撞避免控制,在所述侧方物体满足了预定的侧方碰撞条件的情况下执行用于避免所述侧方物体与所述车辆的碰撞或减轻所述碰撞的伤害的侧方碰撞避免控制,
10、所述侧方检测部的所述物体的识别精度比所述前方检测部低,
11、所述控制部构成为,
12、在所述侧方物体位于所述重叠区域的情况下,与所述侧方物体位于所述侧方检测区域中的所述重叠区域以外的重叠外区域(er)的情况相比,抑制所述侧方碰撞避免控制的执行(步骤920、步骤925、步骤930)。
13、本发明装置在侧方物体位于重叠区域的情况下,与侧方物体位于重叠外区域的情况相比,抑制侧方碰撞避免控制的执行。由此,在侧方物体位于重叠区域的情况下,基于物体的识别精度低的侧方检测部的检测结果的侧方碰撞避免控制的执行被抑制,所以能够减少误执行侧方碰撞避免控制的可能性。如果是与车辆碰撞的可能性高的物体位于重叠区域的情况,则会执行基于识别精度高的前方检测部的检测结果的前方碰撞避免控制,所以能够切实地执行碰撞避免控制。
14、在本发明装置的一方案中,
15、所述控制部构成为,
16、取得表示所述侧方检测部检测到的所述侧方物体实际存在的可能性的可靠度(rd)(步骤910、步骤915、步骤935、步骤945、步骤950、步骤955、步骤960),
17、在所述侧方物体满足了所述侧方碰撞条件的情况下(步骤840“是”),若所述侧方物体的可靠度为预定的阈值可靠度以上(步骤845“是”),则执行所述侧方碰撞避免控制(步骤850、步骤1015、步骤1020),
18、将位于所述重叠区域的所述侧方物体的所述可靠度的上限值设定成,比位于所述重叠外区域的所述侧方物体的所述上限值小(步骤920“是”、步骤925)。
19、本方案所涉及的本发明装置将位于重叠区域的侧方物体的可靠度的上限值设定为比位于重叠外区域的侧方物体的可靠度的上限值小。因而,与位于重叠外区域的侧方物体的可靠度相比,位于重叠区域的侧方物体的可靠度难以成为阈值可靠度以上。其结果,在侧方物体位于重叠区域的情况下,与侧方物体位于重叠外区域的情况相比,侧方碰撞避免控制的执行受到抑制。
20、在本发明装置的一方案中,
21、所述控制部构成为,
22、无论所述前方物体是否正在移动,在所述前方物体满足了所述前方碰撞条件的情况下(步骤740),均执行所述前方碰撞避免控制,
23、在所述侧方物体正在移动(步骤825)、且所述侧方物体满足了所述侧方碰撞条件的情况下,执行所述侧方碰撞避免控制。
24、有可能针对位于重叠区域的物体执行前方碰撞避免控制及侧方碰撞避免控制。在此,虽然在侧方物体静止的情况下不执行侧方碰撞避免控制,但由于侧方检测部的识别精度比前方检测部低,所以侧方检测部有可能将静止物体误判定为移动物体。有可能由于该误判定而针对静止物体误执行侧方碰撞避免控制。如上所述,在侧方物体位于重叠区域的情况下,与侧方物体位于重叠外区域外的情况相比,侧方碰撞避免控制的执行受到抑制,所以能够减少针对位于重叠区域的静止物体误执行侧方碰撞避免控制的可能性。
25、在上述方案中,
26、所述前方检测部及所述侧方检测部配设成,使得所述重叠区域成为误判定物体有可能与所述车辆碰撞的区域,且所述重叠外区域成为所述误判定物体不可能与所述车辆碰撞的区域,该误判定物体是虽然处于静止状态但有可能被误判定为正在移动的物体(图6)。
27、在本方案中,前方检测部及侧方检测部配设成,使得重叠区域成为“误判定物体有可能与车辆碰撞的区域”,且侧方检测区域的重叠外区域成为“误判定物体不可能与车辆碰撞的区域”。因而,即便误判定物体位于侧方检测区域的重叠外区域,该误判定物体也不可能与车辆碰撞,所以误执行侧方碰撞避免控制的可能性极低。另一方面,在误判定物体位于重叠区域的情况下,该误判定物体有可能与车辆碰撞,所以有可能误执行侧方碰撞避免控制。但是,如上所述,在侧方物体位于重叠区域的情况下,与侧方物体位于重叠区域外的情况相比,侧方碰撞避免控制的执行受到抑制,所以能够减少针对位于重叠区域的静止物体误执行侧方碰撞避免控制的可能性。
28、此外,虽然针对重叠区域抑制了侧方碰撞避免控制的执行,但在位于重叠区域的物体与车辆碰撞的可能性高的情况下会执行前方碰撞避免控制。
29、在上述方案中,
30、所述前方检测区域预先设定成,所述前方检测区域以所述车辆的车宽方向的中央部处的所述车辆的前后轴方向为中心而在左方向及右方向上分别具有45度的角度(图6)。
31、随着车辆移动,从车辆来看静止物体正在移动。这样的静止物体相对于车辆的相对速度的前后轴方向成分的大小与表示车辆的速度的车速的大小相等。此外,前后轴方向成分意味着上述相对速度的车辆的前后轴方向的成分。
32、例如,在侧方物体是护栏等静止物体的情况下,若车辆的前后轴方向相对于护栏倾斜,则护栏的相对速度中会产生车辆的车宽方向的成分(车宽方向成分)。该车宽方向成分的大小不会超过上述前后轴方向成分的大小(即,车速的大小)。这是因为,上述静止物体相对于车辆的相对移动方向与车辆的前后轴方向所成的角最大也只是45度(在车辆的前后轴方向与护栏正交的情况下,上述所成的角成为最大),该情况下的静止物体的车宽方向成分的大小与前后轴方向成分的大小相同。
33、因而,在具有该最大的所成的角的静止物体以车辆的前后轴方向为中心而在左方向或右方向上位于45度的角度的范围内的情况下,相对移动方向的延长线有可能与车辆的前端的中央部交叉而与车辆碰撞。如上所述,由于车宽方向成分的大小为车速的大小以下,所以上述相对的移动方向以车辆的前后轴方向为中心而在左方向或右方向上成为45度以下。在本方案中,前方检测区域预先设定成,前方检测区域以车宽方向的中央部处的前后轴方向为中心而在左方向及右方向上分别具有45度的角度。因而,重叠区域成为误判定物体有可能与车辆碰撞的区域。
34、在本发明装置的一方案中,
35、所述控制部构成为,
36、在表示所述前方物体与所述车辆碰撞的可能性的前方碰撞指标值与预定的前方阈值的关系满足了预定条件的情况下(步骤740“是”),所述前方碰撞条件成立,
37、在表示所述侧方物体与所述车辆碰撞的可能性的侧方碰撞指标值与预定的侧方阈值的关系满足了预定条件的情况下(步骤840“是”),所述侧方碰撞条件成立。
38、根据本方案,在前方碰撞指标值与前方阈值的关系满足了预定条件的情况下前方碰撞条件成立而执行前方碰撞避免控制,在侧方碰撞指标值与侧方阈值的关系满足了预定条件的情况下侧方碰撞条件成立而执行侧方碰撞避免控制。由此,能够在前方物体及侧方物体与车辆碰撞的可能性变高了的情况下,执行前方碰撞避免控制及侧方碰撞避免控制。
39、在本发明装置的一方案中,
40、所述前方检测部构成为,
41、具有相机(26)及第1雷达传感器(22),
42、基于所述相机拍摄到的拍摄图像及所述第1雷达传感器的检测结果来识别所述前方物体(步骤720),
43、所述侧方检测部构成为,
44、具有第2雷达传感器(24l、24r),
45、基于所述第2雷达传感器的检测结果来识别所述侧方物体(步骤815)。
46、根据本方案,前方检测部基于相机拍摄到的拍摄图像及第1雷达传感器的检测结果来识别前方物体,相对于此,侧方检测部基于第2雷达传感器的检测结果来识别侧方物体。因而,侧方检测部的物体的识别精度比前方检测部低。
47、本发明所涉及的车辆控制方法,
48、是由搭载于车辆(va)的计算机(20)执行避免物体与所述车辆的碰撞或减轻所述碰撞的伤害的碰撞避免控制的方法。
49、本发明所涉及的车辆控制方法包括:
50、第1步骤(步骤720),基于检测位于所述车辆的前方的前方检测区域(fr)的物体来作为前方物体的前方检测部(22、26)的检测结果,识别所述前方物体;
51、第2步骤(步骤815),基于检测位于侧方检测区域(sr)的物体来作为侧方物体的侧方检测部(24l、24r)的检测结果,识别所述侧方物体,所述侧方检测区域(sr)是一部分重叠区域(or)与所述前方检测区域重叠且位于所述车辆的侧方的区域;
52、第3步骤(步骤1015、步骤1020),在所述前方物体满足了预定的前方碰撞条件的情况下(步骤740“是”)执行用于避免所述前方物体与所述车辆的碰撞或减轻所述碰撞的伤害的前方碰撞避免控制;以及
53、第4步骤(步骤1015、步骤1020),在所述侧方物体满足了预定的侧方碰撞条件的情况下(步骤840“是”)执行用于避免所述侧方物体与所述车辆的碰撞或减轻所述碰撞的伤害的侧方碰撞避免控制,
54、所述侧方检测部的所述物体的识别精度比所述前方检测部低,
55、所述车辆控制方法还包括:
56、第7步骤(步骤920、步骤925、步骤930),在所述侧方物体位于所述重叠区域的情况下,与所述侧方物体位于所述侧方检测区域中的所述重叠区域以外的重叠外区域(er)的情况相比,抑制所述侧方碰撞避免控制的执行。
57、本发明所涉及的程序,使搭载于车辆的计算机执行避免物体与所述车辆(va)的碰撞或减轻所述碰撞的伤害的碰撞避免控制。
58、本发明所涉及的程序使所述计算机执行:
59、第1步骤(步骤720),基于检测位于所述车辆的前方的前方检测区域(fr)的物体来作为前方物体的前方检测部(22、26)的检测结果,识别所述前方物体;
60、第2步骤(步骤815),基于检测位于侧方检测区域的物体来作为侧方物体的侧方检测部(24l、24r)的检测结果,识别所述侧方物体,所述侧方检测区域是一部分重叠区域(or)与所述前方检测区域重叠且位于所述车辆的侧方的区域;
61、第3步骤(步骤1015、步骤1020),在所述前方物体满足了预定的前方碰撞条件的情况下(步骤740“是”)执行用于避免所述前方物体与所述车辆的碰撞或减轻所述碰撞的伤害的前方碰撞避免控制;以及
62、第4步骤(步骤1015、步骤1020),在所述侧方物体满足了预定的侧方碰撞条件的情况下(步骤840“是”)执行用于避免所述侧方物体与所述车辆的碰撞或减轻所述碰撞的伤害的侧方碰撞避免控制,
63、所述侧方检测部的所述物体的识别精度比所述前方检测部低,
64、所述程序还使所述计算机执行:
65、第7步骤(步骤920、步骤925、步骤930),在所述侧方物体位于所述重叠区域的情况下,与所述侧方物体位于所述侧方检测区域中的所述重叠区域以外的重叠外区域(er)的情况相比,抑制所述侧方碰撞避免控制的执行。
66、由此,在侧方物体位于重叠区域的情况下,基于物体的识别精度低的侧方检测部的检测结果的侧方碰撞避免控制的执行受到抑制,所以能够减少误执行侧方碰撞避免控制的可能性。
67、本发明装置具备:
68、侧方检测部(24l、24r),检测位于车辆的侧方的侧方物体;和
69、控制部(20、30、40、50),在所述侧方物体满足了预定的侧方碰撞条件的情况下执行用于避免所述侧方物体与所述车辆的碰撞或减轻所述碰撞的伤害的侧方碰撞避免控制,
70、所述控制部构成为,
71、在所述侧方物体相对于所述车辆的相对速度的所述车辆的车宽方向的成分即车宽方向成分(vrx)的大小比表示所述车辆的速度的车速的大小大(步骤1105“是”)且所述侧方物体满足了所述侧方碰撞条件的情况下(图11所示的步骤840“是”)执行所述侧方碰撞避免控制,在所述车宽方向成分的大小为所述车速的大小以下的情况下(步骤1105“否”)不执行所述侧方碰撞避免控制。
72、如上所述,虽然是静止物体但被误判定为正在移动的物体的相对速度的车宽方向成分的大小为车速的大小以下。本发明装置在物体的相对速度的车宽方向成分的大小为车速的大小以下的情况下,不执行侧方碰撞避免控制,所以,能够减少针对虽然是静止物体但被误判定为正在移动的物体误执行侧方碰撞避免控制的可能性。
73、此外,在上述说明中,为了有助于理解发明,针对与后述实施方式对应的发明的构成,以写入括号的方式添加了在该实施方式中使用的名称和/或附图标记。然而,发明的各构成要素不限定为由所述名称和/或附图标记规定的实施方式。本发明的其他目的、其他特征及附带的优点应该能够从参照以下附图描述的对本发明的实施方式的说明中容易理解到。
- 还没有人留言评论。精彩留言会获得点赞!