一种多轴分布式电驱车辆转向控制方法及车辆与流程
本发明涉及多轴分布式电驱动车辆,尤其涉及一种多轴分布式电驱车辆转向控制方法及车辆。
背景技术:
1、多轴分布式电驱动车辆具有控制灵活度高、传动链短、结构紧凑、传动效率高、空间布置利用率高等特点,独特的结构特点与驱动方式令其在充分挖掘车辆动力学控制潜力、增强车辆安全性、提升驱动效率、简化底盘结构等方面带来明显的技术革新,为高性能车辆控制技术提供硬件载体。各轮独立驱动,各桥独立转向的分布式全电驱动底盘,其突出特点之一是各车轮的力矩矢量可以被独立地进行控制,包括大小和方向。通过输出精确的车轮扭矩和独立的车轮角度,可大大提高底盘运动的控制灵活性,两者之间的协同作用使车辆的平面机动性能的最优化(包括纵向、横向和偏航运动)成为可能。在控制策略上,可以实现面向经济性、动力性、操纵稳定性和高容错能力的多目标优化。
2、传统车辆转向控制由布置于前轮的转向系执行,中后桥随动不提供转向角支持,在低车速下转弯半径也较大。多轴电驱底盘各轮独立驱动,如沿用传统的前轴转向控制方法则无法发挥多轴电驱的优势,在低速下转弯半径大、在中高速又不能提高车辆稳定性。
3、目前的现有技术中,申请号为cn110606078b公开了一种多轴分布式电驱动车辆转向控制方法,该文件根据驾驶员输入转角、参考质心侧偏角和实际质心侧偏角,通过一个模糊控制器计算得到当前状态下机械-差动转向桥的纵向参考间距,然后根据车辆转向桥几何关系由纵向参考间距和驾驶员输入转角解析得到差动转向桥的参考转角,然后下层转角跟踪控制器基于模糊pid算法跟踪参考转角,计算得到合适的差动转矩以驱动差动转向桥完成转向。该文件没有面向具备全轮转向控制的多轴电驱底盘开发,通过差动转矩来进行转向执行,没有发挥出全轮电驱底盘自身的转向系统优势。该文件没有分析转向几何中心和质心之间的x向距离对转向半径的影响,没有设计随车速变化的控制函数。该文件没有实现低速后轴与前轴反向转动减小转弯半径、中高速后轴与前轴同向转动提高稳定性。该文件中前桥采用机械转向、后桥采用差速转向,前后桥转向方式和结构不同,未实现模块化设计。
技术实现思路
1、本发明提供一种多轴分布式电驱车辆转向控制方法,方法基于开发的单轨模型传递函数,可实现车速低于一定的参考车速时,后桥和前桥反向转向,帮助车辆转向;当车速高于一定的参考车速vc时,后四桥和前两桥同向转向,增强稳定性。
2、方法包括:
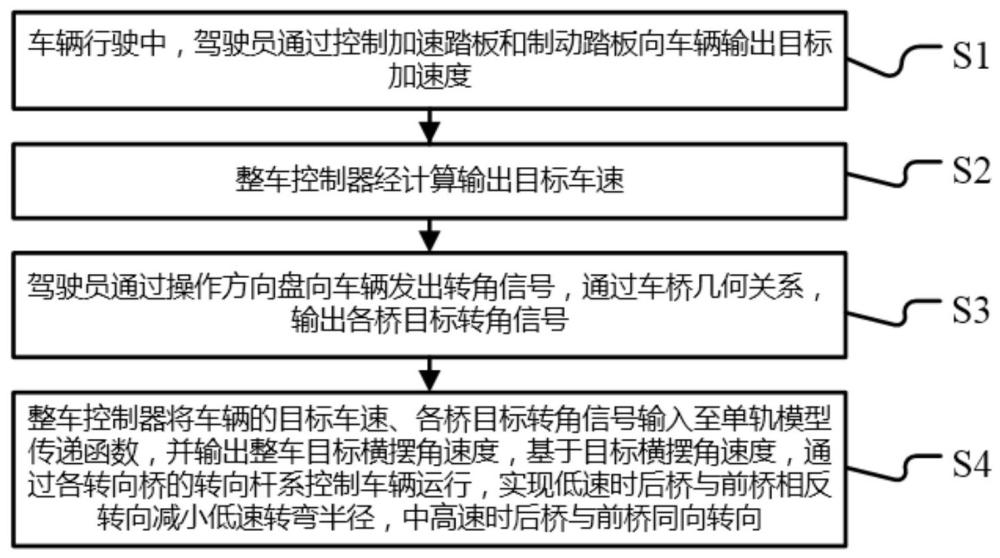
3、车辆行驶中,驾驶员通过控制加速踏板和制动踏板向车辆输出目标加速度;
4、整车控制器经计算输出目标车速;
5、驾驶员通过操作方向盘向车辆发出转角信号,通过车桥几何关系,输出各桥目标转角信号;
6、整车控制器将车辆的目标车速、各桥目标转角信号输入至单轨模型传递函数,并输出整车目标横摆角速度,基于目标横摆角速度,通过各转向桥的转向杆系控制车辆运行,实现低速时后桥与前桥相反转向减小低速转弯半径,中高速时后桥与前桥同向转向。
7、进一步需要说明的是,方法中,还建立多轴车单轨模型控制关系,采用类似四轮车辆线性二自由度模型的方法建立单轨模型传递函数,如公式(1):
8、……………(1)
9、其中,为车辆的质心侧偏角;为车辆的质心横摆角速度;
10、为第n桥车轮的侧偏刚度,n为1、2、3 整数,为n个侧偏刚度的其中的一个;
11、为第n桥车轮的转向角,n为1、2、3 整数,为n个车轮转向角的其中的一个;同样,n的上限值,可以根据车辆的车轮总数进行设定。
12、为第i桥的位置,当桥在质心前方时,此值为正,否则为负;为整车的质量;为整车横摆方向的转动惯量;为车辆x向速度。
13、进一步需要说明的是,方法中,
14、对公式(1)进行拉普拉斯变换,得到公式(2):
15、…………(2);
16、为经拉格朗日变换后的质心侧偏角。
17、进一步需要说明的是,方法中,对车辆的横向运动,采用零化质心侧偏角控制,定义目标质心侧偏角时刻保持为零,基于公式(3)得到横摆运动控制的参考值为:
18、…………………………(3)。
19、进一步需要说明的是,方法中,定义满足阿克曼转向的多轴车全桥转向时的几何关系:
20、…………………………………………………(4)
21、其中,dfp转向中心距为转向几何中心和质心之间的x向距离,定义差值比为:
22、…………………………………………………(5);
23、将几何关系代入拉式变换后的横摆动力学模型,得到:
24、………………………(6);
25、运算过程数列a表示为:
26、………(7);
27、为自定义系数。
28、进一步需要说明的是,方法中,当车速低于预设的参考车速vc时,后四桥和前两桥反向转向,辅助车辆转向;
29、当车速高于预设的参考车速vc时,定义如式(8)的系数使后四桥和前两桥同向转向,后四桥在反向和同向转向模式下设置转向的极限值,极限值由ka和kb表示;
30、………………………………………(8)
31、整车控制器根据以上公式(1)至公式(8)计算出各桥质心横摆角速度,结合目标车速、各桥目标转角输出电动轮转向执行机构的控制信号。
32、本发明还提供一种车辆,包括存储器、整车控制器、加速踏板、制动踏板、方向盘、及存储在所述存储器上并可在所述整车控制器上运行的计算机程序,所述整车控制器执行所述程序时实现所述多轴分布式电驱车辆转向控制方法的步骤。
33、从以上技术方案可以看出,本发明具有以下优点:
34、本发明提供的多轴分布式电驱车辆转向控制方法及车辆定义了面向顶层控制的多轴车单轨模型,以模块化的电动转向执行机构为基础,车辆低速时后桥与前桥相反转向减小低速转弯半径,中高速时后桥与前桥同向转向提高车辆稳定性的控制策略。通过多轴分布式电驱车辆转向控制方法可以实现以下功能:
35、(1)利用驾驶员的加速踏板与制动踏板信号,参考当前车速,得到目标车速,用于顶层跟踪控制器生成下一时刻的车辆总纵向驱动力目标,或利用踏板map直接产生车辆总纵向驱动力目标;
36、(2)利用方向盘转角信号和当前车速信号,根据不同转向模式给出各桥的目标转向角,用于各桥主动转向控制;
37、(3)利用方向盘转角信号和当前车速信号,给出目标横摆角速度,用于顶层跟踪控制器生成车辆总横摆力矩控制目标。
技术特征:
1.一种多轴分布式电驱车辆转向控制方法,其特征在于,方法包括:
2.根据权利要求1所述的多轴分布式电驱车辆转向控制方法,其特征在于,方法中,还建立多轴车单轨模型控制关系,采用类似四轮车辆线性二自由度模型的方法建立单轨模型传递函数,如公式(1):
3.根据权利要求2所述的多轴分布式电驱车辆转向控制方法,其特征在于,方法中,
4.根据权利要求3所述的多轴分布式电驱车辆转向控制方法,其特征在于,方法中,对车辆的横向运动,采用零化质心侧偏角控制,定义目标质心侧偏角时刻保持为零,基于公式(3)得到横摆运动控制的参考值,即:
5.根据权利要求4所述的多轴分布式电驱车辆转向控制方法,其特征在于,方法中,定义满足阿克曼转向的多轴车全桥转向时的几何关系:
6.根据权利要求5所述的多轴分布式电驱车辆转向控制方法,其特征在于,方法中,当车速低于预设的参考车速vc时,后四桥和前两桥反向转向,辅助车辆转向;
7.一种车辆,其特征在于,包括存储器、整车控制器、加速踏板、制动踏板、方向盘、及存储在所述存储器上并可在所述整车控制器上运行的计算机程序,所述整车控制器执行所述程序时实现如权利要求1至6任一项所述多轴分布式电驱车辆转向控制方法的步骤。
技术总结
本发明提供一种多轴分布式电驱车辆转向控制方法及车辆,涉及多轴分布式电驱动车辆技术领域,方法包括:车辆行驶中,驾驶员通过控制加速踏板和制动踏板向车辆输出目标加速度;整车控制器经计算输出目标车速;驾驶员通过操作方向盘向车辆发出转角信号,通过车桥几何关系,输出各桥目标转角信号;整车控制器将车辆的目标车速、各桥目标转角信号输入至单轨模型传递函数,并输出整车目标横摆角速度,基于目标横摆角速度,通过各转向桥的转向杆系控制车辆运行,实现低速时后桥与前桥相反转向减小低速转弯半径,中高速时后桥与前桥同向转向。本发明低速时后桥与前桥相反转向减小低速转弯半径,中高速时后桥与前桥同向转向提高车辆稳定性的控制策略。
技术研发人员:夏长庚,秦涛,韩峰,陈学东,张光明,刘厚斗,杨孟
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!