车辆的PEB触发方法、装置、存储介质及车辆与流程
本技术涉及智能驾驶辅助领域,具体而言,涉及一种车辆的peb触发方法、装置、存储介质及车辆。
背景技术:
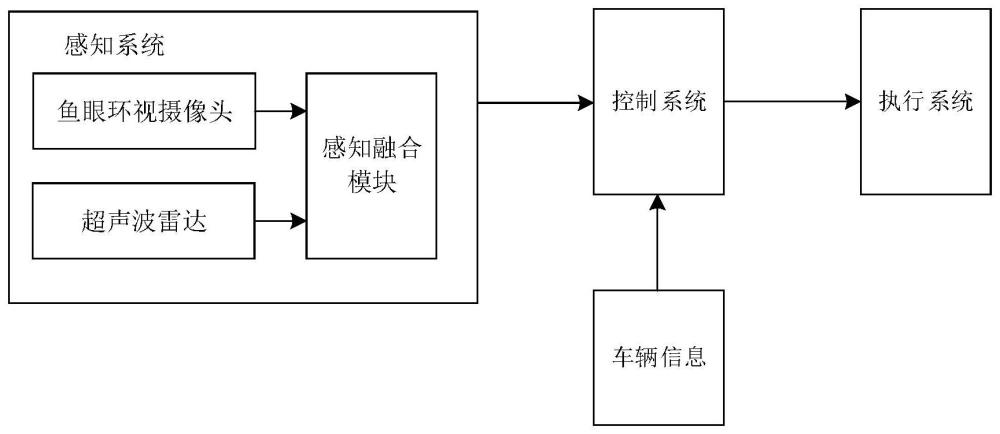
1、peb(parking emergency brake,泊车紧急制动系统)是智能驾驶辅助领域中一项辅助主动安全技术。当开启peb功能(挂入倒挡或按压按钮)并且车速低于10km/h时,可激活peb的功能。配备peb车辆,在车辆泊车时,如果peb识别到有碰撞危险时,peb将触发紧急制动或保持静止来避免碰撞。如图1所示,peb通常由感知系统、控制系统、执行系统组成。感知系统通过鱼眼环视摄像头和超声波传感器uss对障碍物进行探测,并通过融合后筛选出障碍物目标。控制系统根据感知系统感知到的障碍物目标,根据当前车辆的速度、加速度等信息判断刹车时机及刹车加速度大小、加速度变化率等制动控制信息。执行系统根据控制系统计算的刹车点、加速度、加速度变化率执行制动,使得车辆刹停并保持静止以避免碰撞。
2、现有的peb主要根据障碍物感知信息和车辆信息来判断刹车时机和触发刹车的过程,其中有一种基于ttc(time to collision)值作为门限触发peb制动的方法,其通过计算目标障碍物的距离除以当前车速得到的商为ttc值。如果ttc值小于ttc门限值,则触发peb紧急制动请求。例如,设定ttc小于0.8触发peb紧急制动请求。执行器收到peb执行器指令进行制动。
3、然而,这些现有技术存在一些缺点。首先,由于逻辑过于简单,标定的ttc值不一定适用于各个速度段,其次,这些方案针对坡道路面时精度无法保证,无法保证刹停距离。因此,需要一种新的技术方案来解决这些问题。
技术实现思路
1、为了解决上述问题,本发明提出一种车辆的peb触发方法、装置、存储介质及车辆,以解决上述问题。
2、本发明提供了一种车辆的peb触发方法,所述方法包括:根据车辆车速和纵向加速度获取peb最大减速度和peb建压斜率;根据所述车辆车速、所述peb最大减速度、peb响应时间、peb建压时间和预设的安全距离获取peb制动距离需求;在检测到障碍物距离与车辆的距离小于或等于所述peb制动距离需求时,根据所述peb最大减速度和所述peb建压斜率触发peb制动。
3、在一实施方式中,所述根据车辆车速和纵向加速度获取peb最大减速度和peb建压斜率的步骤,包括:获取初速度与最大减速度的对应表、车速与减速度变化率的对应表;将所述车辆车速设为初速度,根据所述初速度与最大减速度的对应表获取所述初速度对应的最大减速度,根据所述初速度对应的所述最大减速度获取待补偿的peb最大减速度;根据所述车速与减速度变化率的对应表,获取所述车辆车速对应的减速度变化率,根据所述车辆车速对应的所述减速度变化率获取待补偿的peb建压斜率;根据所述纵向加速度获取道路的坡道情况;根据所述道路的坡道情况对所述待补偿的peb最大减速度和所述待补偿的peb建压斜率进行补偿,以获取所述peb最大减速度和所述peb建压斜率。
4、在一实施方式中,所述获取初速度与最大减速度的对应表、车速与减速度变化率的对应表的步骤,包括:根据车辆在不同所述初速度的peb制动距离,和所述车辆在不同所述peb制动距离时的制动舒适性,获取所述初速度与最大减速度的对应表;根据所述车辆在不同所述车辆车速的所述peb制动距离,和所述车辆在不同所述peb制动距离时的所述制动舒适性,获取所述车速与减速度变化率的对应表。
5、在一实施方式中,所述根据所述道路的坡道情况对所述待补偿的peb最大减速度和所述待补偿的peb建压斜率进行补偿,以获取所述peb最大减速度和所述peb建压斜率的步骤,包括:在所述坡道情况是下坡情况时,增加所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率;在所述坡道情况是上坡情况时,减少所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率。
6、在一实施方式中,所述在所述坡道情况是下坡情况时,增加所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率的步骤,包括:在所述下坡情况是第一下坡情况时,根据所述第一下坡情况对应的第一下坡补偿值,增加所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率;在所述下坡情况是第二下坡情况时,根据所述第二下坡情况对应的第二下坡补偿值,增加所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率。
7、在一实施方式中,所述在所述坡道情况是上坡情况时,减少所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率的步骤,包括:在所述上坡情况是第一上坡情况时,根据所述第一上坡情况对应的第一上坡补偿值,减少所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率;在所述上坡情况是第二上坡情况时,根据所述第二上坡情况对应的第二上坡补偿值,减少所述待补偿的peb最大减速度和所述待补偿的peb建压斜率,以获取所述peb最大减速度和所述peb建压斜率。
8、在一实施方式中,所述根据所述车辆车速、所述peb最大减速度、peb响应时间、peb建压时间和预设的安全距离获取peb制动距离需求的步骤,包括:根据所述车辆车速和所述peb响应时间,获取所述peb响应时间的行驶距离;根据所述peb最大减速度和peb建压时间,获取所述peb建压时间的行驶距离;根据所述车辆车速和所述peb最大减速度,获取最大减速度行驶时间,根据所述peb最大减速度和所述最大减速度行驶时间,获取所述peb最大减速度的行驶距离;根据所述peb响应时间的行驶距离、所述peb建压时间的行驶距离、所述peb最大减速度的行驶距离和所述预设的安全距离,获取所述peb制动距离需求。
9、本发明还提供一种车辆的peb触发装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时,实现如上述的车辆的peb触发方法的步骤。
10、本发明还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时,实现如上述的车辆的peb触发方法的步骤。
11、本发明还提供一种车辆,包括上述的车辆的peb触发装置。
12、本发明提供的一种车辆的peb控制方法、装置、存储介质及车辆,根据车辆车速获取待补偿的peb最大减速度和待补偿的peb建压斜率,根据纵向加速度获取道路的坡道情况,并根据道路的坡道情况对待补偿的peb最大减速度和待补偿的peb建压斜率进行补偿,以获取peb最大减速度和所述peb建压斜率,然后根据车辆车速、peb最大减速度、peb响应时间、peb建压时间和预设的安全距离获取peb制动距离需求,当检测到障碍物距离与车辆的距离小于或等于peb制动距离需求时,根据peb最大减速度和peb建压斜率触发peb制动。能提升车辆在不同道路坡道情况下的peb制动精准性和制动舒适性。
- 还没有人留言评论。精彩留言会获得点赞!