车辆侧倾驱动机构及应用该机构的主动侧倾三轮车的制作方法
本发明涉及一种车辆侧倾驱动机构及应用该机构的主动侧倾三轮车,属于车辆底盘,特别涉及主动侧倾车辆的侧倾驱动控制技术范畴。
背景技术:
1、主动侧倾控制系统通过控制车辆在转弯时向弯道内侧倾斜程度,提高了车辆弯道行驶稳定性、平顺性、通行速度和安全性,对于小轮距、窄体车辆,主动侧倾技术可以使车辆在过弯时或者驶过倾斜路面时自动倾斜一定角度,产生一个平衡力矩,来抵抗车辆受到的离心力或侧翻力,以保持车辆稳定的行驶姿态。
2、主动侧倾车辆在弯道行驶过程中,如果进一步提高行驶速度,所产生的离心力增大,车辆稳定行驶所需较大的侧倾角,主动侧倾车辆通过悬架侧倾系统,使两车轮相对车身快速、大位移量运动,实现车辆正时、大角度侧倾,需要侧倾运动快速响应;对于小轮距、窄体车辆为对象的主动侧倾车辆,万向节无法实现差速器两个半轴至驱动轮之间的运动和动力传输,因此主动侧倾车辆配置两个轮毂电机驱动为最经济和实用版本,而轮毂电机的质量和转动惯量较大,导致簧下质量变大;主动侧倾车辆通过平衡杆串联双减震器驱动车辆侧倾运动时,一侧减震器继续压缩、另一侧减震器释放,造成车辆侧倾角响应滞后,影响了车辆侧倾运动的响应速度;为了抑制由于悬架弹簧阻尼系统造成的侧倾角响应滞后,减小侧倾运动传动系统非线性,提高车辆侧倾响应速度,文献1:车辆侧倾驱动装置及应用该装置的主动侧倾三轮车,cn2022110023146,在侧倾运动传动系统中并联一个扭杆弹簧,由平衡杆串联双减震器与扭杆弹簧串联双连杆共同驱动车辆侧倾,以抑制由于减震器的弹簧阻尼系统造成的侧倾角响应滞后,减小侧倾运动传动系统非线性,提高车辆侧倾响应速度;文献2:车辆侧倾运动控制机构及控制方法,cn2023108326380,对两个减震器各自并联一个液压油缸,各油缸同时进行油路通、断控制,通过改变侧倾运动传动系统刚性,实现车辆的侧倾运动正时响应和精确控制,同时保障车辆行驶平顺性和舒适性;为了侧倾运动正时响应和精确控制,研究主动侧倾车辆的侧倾驱动、控制系统,对于提高车辆安全性和舒适性具有实际应用价值。
技术实现思路
1、本发明目的是要提供一种车辆侧倾驱动机构,引入一个整体车桥,车辆减震系统设置在车桥与车身之间,独立悬架安装在车桥上、侧倾驱动和传动系统设置在车桥上,侧倾运动传动系统中不包含弹性、阻尼元件,以便提高车辆侧倾响应速度和侧倾运动控制精度。
2、为了达到本发明目的所采取的技术方案包括:
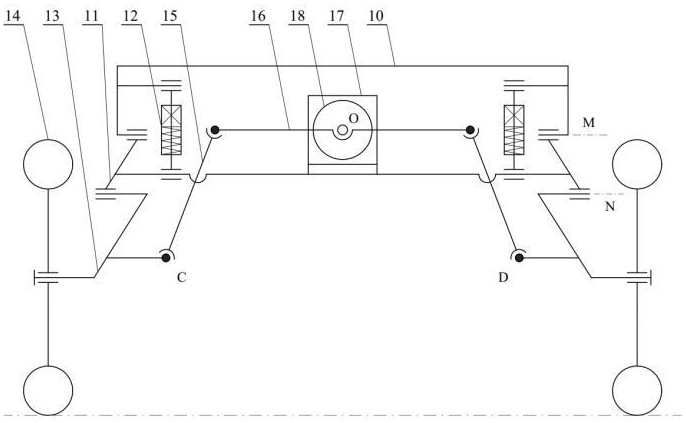
3、车辆侧倾驱动机构包括:车桥(11)为一个横置式整体件,车桥(11)一侧与车身(10)转动连接、转动轴线m垂直于车身中垂面,两个减震器(12)分别与车身(10)和车桥(11)转动连接、各转动连接点处转动轴线均平行于m,两个减震器(12)关于车身中垂面对称、各减震器(12)均处于受压状态工作,两个摆臂(13)的一端均与车桥(11)同轴线转动连接、转动轴线n平行于m,两个摆臂(13)另一端分别联接一个车轮(14)、两个车轮(14)转动轴线均平行于n,两个摆臂(13)和两个车轮(14)分别关于车身中垂面对称;平衡杆(16)中点o与车桥(11)转动连接,转动轴线k位于车身中垂面内、且与车桥(11)的两平行轴线m、n定义的平面形成仰角θ,平衡杆(16)两端由球铰链各自连接一个连杆(15),两等长连杆(15)另一端分别与左、右侧的摆臂(13)球铰链连接,两连接点c、d关于车身中垂面对称;侧倾电机(18)串联减速器(17)后安装在车桥(11)上,侧倾电机(18)轴联接减速器(17)的输入轴、减速器(17)的输出轴与平衡杆(16)垂直固连,侧倾电机(18)通过减速器(17)驱动平衡杆(16)相对车桥(11)绕轴线k转动,侧倾电机(18)控制车身(10)侧倾运动、确定车身(10)侧倾姿态,形成一种车辆侧倾驱动机构。
4、上述的车辆侧倾驱动机构中,平衡杆(16)串联双连杆(15)驱动车辆侧倾,侧倾运动传动系统中不包含弹性、阻尼元件,实现车辆侧倾运动的正时响应和精确控制;由车身(10)和车桥(11)之间的减震器(12)滤除道路作用于车轮(14)的震动,保障车辆行驶平顺性和舒适性。
5、上述的车辆侧倾驱动机构中,平衡杆(16)相对车桥(11)转角为侧倾致动角α,车身相对地面夹角为车辆侧倾角β,当侧倾致动角α=0时,车辆侧倾驱动机构关于车身中垂面对称,车辆侧倾角β=0,车辆直立行驶;当侧倾致动角α≠0时,获得车辆侧倾角β与侧倾致动角α关系的侧倾函数β=f(α),车辆侧倾行驶,车辆侧倾驱动机构通过控制侧倾致动角α实现车辆侧倾运动主动控制,提高了主动侧倾车辆安全性和舒适性。
6、上述的车辆侧倾驱动机构中,设置轴线k的仰角θ,使得两连杆(15)在车身中垂面投影与轴线k形成近似90°左右的工作夹角,以利于提高侧倾运动传动效率。
7、主动侧倾三轮车包括:由一组车辆侧倾驱动机构后置,在同一车身上按照给定的轴距一组前轮转向定位机构前置、共用同一车身中垂面,前轮转向,双后轮驱动,车辆侧倾驱动机构驱动、控制车辆侧倾运动,前轮转向定位机构与车身一起自适应侧倾,构成具备双后轮驱动、前轮转向特征的主动侧倾车辆,具备车辆安全性、舒适性好特点。
8、上述的前轮转向定位机构包括:转向主轴(21)为上部圆柱体、下部双叉臂的组合体,转向主轴(21)的圆柱体与车身(10)转动连接、转动轴线l位于车身中垂面内,在车身中垂面内l与车身横垂面形成后倾角δ,转向节(22)为u形臂,转向节(22)的u形臂开口端前部与前轮(24)转动连接,转向节(22)的u形臂后部与转向主轴(21)的双叉臂末端转动连接,转向节(22)的u形臂中部分别与两个前减震器(23)转动连接,两个前减震器(23)的另一端分别与转向主轴(21)的双叉臂转动连接,各转动连接点处转动轴线相互平行、且均与l垂直交错,前轮(24)转动轴线与l垂直交错、两垂直交错轴线距离e,垂直于前轮(24)转动轴线的前轮中位面过l,两个前减震器(23)处于受压状态工作,形成前轮转向定位机构。
9、其中:前轮半径为r时、拖曳距s=(r-e/sinδ)tanδ,前轮绕其轴线相对转向节自转、以适应车辆行驶速度,前轮、转向节、前减震器与转向主轴一起相对车身绕l转动实现前轮转向、转向角φ,前轮和转向节相对转向主轴转动、压缩前减震器实现前轮对地面仿形;φ=0时,前轮转向定位机构关于车身中垂面对称,前轮由转向角φ和侧倾角β定位,车辆行驶过程中,单个前轮转向、侧倾条件下实现对地面仿形运动。
10、本发明的有益效果在于,所提出的一种车辆侧倾驱动机构及应用该机构的主动侧倾三轮车,通过引入一个整体车桥,车辆减震系统设置在车桥与车身之间,由车身和车桥之间的减震器滤除道路作用于车轮的震动,以保障车辆行驶平顺性和舒适性;独立悬架安装在车桥上,侧倾运动传动系统设置在车桥上,平衡杆串联双连杆驱动车辆侧倾,侧倾运动传动系统中不包含弹性、阻尼元件,实现车辆侧倾运动的正时响应和精确控制。
技术特征:
1.车辆侧倾驱动机构,其特征在于,包括:车桥为一个横置式整体件,车桥一侧与车身转动连接、转动轴线m垂直于车身中垂面,两个减震器分别与车身和车桥转动连接、各转动连接点处转动轴线均平行于m,两个减震器关于车身中垂面对称、各减震器均处于受压状态工作,两个摆臂的一端均与车桥同轴线转动连接、转动轴线n平行于m,两个摆臂另一端分别联接一个车轮、两个车轮转动轴线均平行于n,两个摆臂和两个车轮分别关于车身中垂面对称;平衡杆中点与车桥转动连接,转动轴线k位于车身中垂面内、且与车桥的两平行轴线m、n定义的平面形成仰角θ,平衡杆两端由球铰链各自连接一个连杆,两等长连杆另一端分别与左、右侧的摆臂球铰链连接,两连接点关于车身中垂面对称;侧倾电机串联减速器后安装在车桥上,侧倾电机轴联接减速器的输入轴、减速器的输出轴与平衡杆垂直固连,侧倾电机通过减速器驱动平衡杆相对车桥绕轴线k转动,侧倾电机控制车身侧倾运动、确定车身侧倾姿态。
2.根据权利要求1所述的车辆侧倾驱动机构,其特征在于,所述的平衡杆串联双连杆驱动车辆侧倾,侧倾运动传动系统中不包含弹性、阻尼元件,实现车辆侧倾运动的正时响应和精确控制;由车身和车桥之间的减震器滤除道路作用于车轮的震动,保障车辆行驶平顺性和舒适性。
3.根据权利要求1所述的车辆侧倾驱动机构,其特征在于,所述的平衡杆相对车桥转角为侧倾致动角α,车身相对地面夹角为车辆侧倾角β,当侧倾致动角α=0时,车辆侧倾驱动机构关于车身中垂面对称,车辆侧倾角β=0,车辆直立行驶;当侧倾致动角α≠0时,获得车辆侧倾角β与侧倾致动角α关系的侧倾函数β=f(α),车辆侧倾行驶。
4.根据权利要求1所述的车辆侧倾驱动机构,其特征在于,设置轴线k的仰角θ,使得两连杆在车身中垂面投影与轴线k形成近似90°左右的工作夹角,以利于提高侧倾运动传动效率。
5.主动侧倾三轮车,其特征在于,包括:由一组权利要求1所述的车辆侧倾驱动机构后置,在同一车身上按照给定的轴距一组前轮转向定位机构前置、共用同一车身中垂面,前轮转向,双后轮驱动,车辆侧倾驱动机构驱动、控制车辆侧倾运动,前轮转向定位机构与车身一起自适应侧倾,构成具备双后轮驱动、前轮转向特征的主动侧倾车辆;
技术总结
本发明涉及一种车辆侧倾驱动机构及应用该机构的主动侧倾三轮车,属于车辆底盘技术领域,探索主动侧倾车辆的新型侧倾驱动和运动控制技术,车辆侧倾驱动机构的关键技术措施为:引入一个整体车桥,车辆减震系统设置在车桥与车身之间,由车身和车桥之间的减震器滤除道路作用于车轮的震动,以保障车辆行驶平顺性和舒适性;独立悬架安装在车桥上、侧倾驱动和传动系统设置在车桥上,平衡杆串联双连杆驱动车辆侧倾,侧倾运动传动系统中不包含弹性、阻尼元件,实现车辆侧倾运动的正时响应和精确控制。
技术研发人员:柴智刚,王亚,杨鹏艺,魏文军
受保护的技术使用者:坐骑(上海)科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!