盲区监测方法、装置及车辆与流程
本技术涉及驾驶辅助技术,尤其涉及一种盲区监测方法、装置及车辆。
背景技术:
1、对于如商业车一样的体型大的车辆,其在行驶过程中容易形成视野盲区,从而容易引发交通事故。为了降低因视野盲区引发交通事故的风险,已知技术中提出车辆盲区监测功能,通过主动预警提醒驾驶员注意安全。
2、具体的,已知技术中车辆盲区监测系统一般包括分别安装在车辆左右两尾端的盲区监测雷达、控制器及报警器,其中,盲区监测雷达的信号输入端与控制器的信号输入端连接,以向控制器传输用于指示盲区状态的信号;控制器的信号输出端与报警器的信号输入端连接,用于指示盲区状态的信号指示盲区存在障碍物时,向报警器输出报警信号,以使报警器作出报警动作,提示驾驶员注意安全。
3、上述过程中,在盲区中存在静止、且并不会对车辆状态造成破坏的障碍物时,仍旧通过报警器向驾驶员做出警示,反而容易影响驾驶员的正常操作,从而不利于提升行驶安全。
技术实现思路
1、本技术提供一种盲区监测方法、装置及车辆,用以提高预警准确性,从而有利于提升车辆行驶安全性。
2、一方面,本技术提供一种盲区监测方法,所述方法包括:
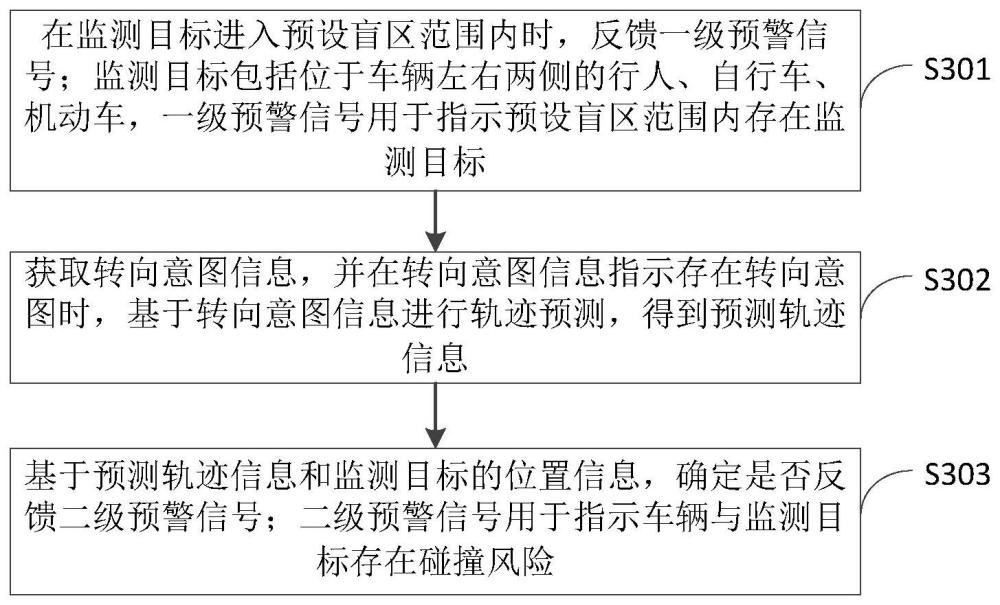
3、在监测目标进入预设盲区范围内时,反馈一级预警信号;所述监测目标包括位于车辆左右两侧的行人、自行车、机动车,所述一级预警信号用于指示所述预设盲区范围内存在所述监测目标;
4、获取转向意图信息,并在所述转向意图信息指示存在转向意图时,基于所述转向意图信息进行轨迹预测,得到预测轨迹信息;
5、基于所述预测轨迹信息和所述监测目标的位置信息,确定是否反馈二级预警信号,所述二级预警信号用于指示所述车辆与所述监测目标存在碰撞风险。
6、在另一种可能实现的方式中,所述获取转向意图信息,并在所述转向意图信息指示存在转向意图时,基于所述转向意图信息进行轨迹预测,得到预测轨迹信息,包括:
7、获取观测信息,将所述观测信息输入训练好的驾驶意图识别模型,以得到所述转向意图信息;所述观测信息包括车辆速度、方向盘转角、横向加速度、纵向加速度、方向盘转角速度、方向盘力矩;所述训练好的驾驶意图识别模型是基于隐马尔可夫算法得到的;所述转向意图信息用于指示存在左转意图、右转意图或不存在转向意图。
8、在另一种可能实现的方式中,所述方法还包括:
9、获取所述车辆的历史观测信息和所述历史观测信息对应的目标转向意图信息;
10、基于所述历史观测信息和所述目标转向意图,对原始的驾驶意图识别模型进行训练,以计算随机状态转移概率矩阵、输出概率的转移矩阵及初始随机状态分布的概率矩阵,得到所述训练好的驾驶意图识别模型。
11、在另一种可能实现的方式中,所述获取转向意图信息,并在所述转向意图信息指示存在转向意图时,基于所述转向意图信息进行轨迹预测,得到预测轨迹信息,包括:
12、监测转向灯信号,根据所述转向灯信号确定所述转向意图信息;所述转向灯信号为左转信号时,所述转向意图信息用于指示存在左转意图,所述转向灯信号为右转信号时,所述转向意图信息用于指示存在右转意图,在不存在所述转向灯信号时,所述转向意图信息用于指示不存在转向意图。
13、在另一种可能实现的方式中,所述基于所述转向意图信息进行轨迹预测,得到轨迹预测信息,包括:
14、获取所述车辆的状态信息和采样时间信息,所述状态信息包括车辆航向角、车辆速度、车辆加速度、车辆横摆角速度,以及车辆坐标系下的横坐标和纵坐标;所述采样时间信息用于指示得到所述状态信息的采样时间;
15、将所述状态信息和所述采样时间输入车辆轨迹预测模型,以得到所述车辆的轨迹预测信息;所述车辆轨迹预测模型是基于恒定转弯率和速度ctrv模型搭建的,表示为:
16、
17、
18、其中,x、y分别用于表示车辆坐标系下的横纵向坐标,纵向坐标平行于车辆的行驶方向;θ用于表示所述车辆航向角,v用于表示所述车辆速度,a用于表示所述车辆加速度,ω用于表示所述车辆横摆角速度,t用于表示所述采样时间。
19、在另一种可能实现的方式中,基于所述预测轨迹信息和所述监测目标的位置信息,确定是否反馈二级预警信号,包括:
20、基于预设规则和所述监测目标的位置信息,确定所述监测目标的目标轨迹信息;所述预设规则为xj(t)=xj(t-t),yj(t)=v×t,其中,xj(t)用于表示t时刻所述监测目标的横向坐标,xj(t-t)用于表示t-t时刻所述监测目标的横向坐标,yj(t)用于表示t时刻所述监测目标的纵向坐标,v用于表示所述监测目标的速度,t用于表示预测时长;
21、在所述目标轨迹信息满足预设条件时,确定并反馈所述二级预警信号,以指示所述车辆与所述监测目标存在碰撞风险;所述预设条件包括:y2(t)≤yj(t)≤y1(t),其中,y1(t)用于表示车尾的轨迹,y2(t)用于表示车头的轨迹;
22、在所述目标轨迹信息不满足所述预设条件时,确定不反馈所述二级预警信号。
23、第二方面,本技术提供一种盲区监测装置,包括:
24、第一反馈模块,用于在监测目标进入预设盲区范围内时,反馈一级预警信号;所述监测目标包括位于车辆左右两侧的行人、自行车、机动车,所述一级预警信号用于指示所述预设盲区范围内存在所述监测目标;
25、预测模块,用于获取转向意图信息,并在所述转向意图信息指示存在转向意图时,基于所述转向意图信息进行轨迹预测,得到预测轨迹信息;
26、第二反馈模块,用于基于所述预测轨迹信息和所述监测目标的位置信息,确定是否反馈二级预警信号,所述二级预警信号用于指示所述车辆与所述监测目标存在碰撞风险。
27、在另一种可能实现的方式中,所述预测模块具体用于:
28、获取观测信息,将所述观测信息输入训练好的驾驶意图识别模型,以得到所述转向意图信息;所述观测信息包括车辆速度、方向盘转角、横向加速度、纵向加速度、方向盘转角速度、方向盘力矩;所述训练好的驾驶意图识别模型是基于隐马尔可夫算法得到的;所述转向意图信息用于指示存在左转意图、右转意图或不存在转向意图。
29、在另一种可能实现的方式中,所述预测模块还用于:
30、获取所述车辆的历史观测信息和所述历史观测信息对应的目标转向意图信息;
31、基于所述历史观测信息和所述目标转向意图,对原始的驾驶意图识别模型进行训练,以计算随机状态转移概率矩阵、输出概率的转移矩阵及初始随机状态分布的概率矩阵,得到所述训练好的驾驶意图识别模型。
32、在另一种可能实现的方式中,所述预测模块具体用于:
33、监测转向灯信号,根据所述转向灯信号确定所述转向意图信息;所述转向灯信号为左转信号时,所述转向意图信息用于指示存在左转意图,所述转向灯信号为右转信号时,所述转向意图信息用于指示存在右转意图,在不存在所述转向灯信号时,所述转向意图信息用于指示不存在转向意图。
34、在另一种可能实现的方式中,所述预测模块具体用于:
35、获取所述车辆的状态信息和采样时间信息,所述状态信息包括车辆航向角、车辆速度、车辆加速度、车辆横摆角速度,以及车辆坐标系下的横坐标和纵坐标;所述采样时间信息用于指示得到所述状态信息的采样时间;
36、将所述状态信息和所述采样时间输入车辆轨迹预测模型,以得到所述车辆的轨迹预测信息;所述车辆轨迹预测模型是基于恒定转弯率和速度ctrv模型搭建的,表示为:
37、
38、
39、其中,x、y分别用于表示车辆坐标系下的横纵向坐标,纵向坐标平行于车辆的行驶方向;θ用于表示所述车辆航向角,v用于表示所述车辆速度,a用于表示所述车辆加速度,ω用于表示所述车辆横摆角速度,t用于表示所述采样时间。
40、在另一种可能实现的方式中,所述第二反馈模块具体用于:
41、基于预设规则和所述监测目标的位置信息,确定所述监测目标的目标轨迹信息;所述预设规则为xj(t)=xj(t-t),yj(t)=v×t,其中,xj(t)用于表示t时刻所述监测目标的横向坐标,xj(t-t)用于表示t-t时刻所述监测目标的横向坐标,yj(t)用于表示t时刻所述监测目标的纵向坐标,v用于表示所述监测目标的速度,t用于表示预测时长;
42、在所述目标轨迹信息满足预设条件时,确定并反馈所述二级预警信号,以指示所述车辆与所述监测目标存在碰撞风险;所述预设条件包括:y2(t)≤yj(t)≤y1(t),其中,y1(t)用于表示车尾的轨迹,y2(t)用于表示车头的轨迹;
43、在所述目标轨迹信息不满足所述预设条件时,确定不反馈所述二级预警信号。
44、第三方面,本技术提供一种车辆,包括:
45、雷达设备,用于探测监测目标是否进入预设盲区范围内,得到探测信号;所述监测目标包括位于车辆左右两侧的行人、自行车、机动车;
46、监测设备,用于获取观测信息、转向灯信号、状态信息和采样时间信息,其中,所述观测信息包括车辆速度、方向盘转角、横向加速度、纵向加速度、方向盘转角速度、方向盘力矩;所述转向灯信号包括左转信号和右转信号;所述状态信息包括车辆航向角、车辆速度、车辆加速度、车辆横摆角速度,以及车辆坐标系下的横坐标和纵坐标;所述采样时间信息用于指示获取所述状态信息的采样时间;
47、盲区监测控制设备,其中一个信号输入端连接于所述雷达设备的信号输出端,用于获取所述探测信号;另一个信号输入端连接于所述监测设备的信号输出端,用于获取所述观测信息、所述转向灯信号、所述状态信息和所述采样时间信息;所述盲区监测控制设备还用于执行如第一方面任一项所述的方法。
48、第四方面,本技术提供一种盲区监测控制设备,包括处理器以及与所述处理器通信连接的存储器;
49、所述存储器存储计算机执行指令;
50、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面任一项所述的方法。
51、第五方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上第一方面任一项所述的方法。
52、本技术提供一种盲区监测方法、装置及车辆,其中,本技术的方法中,在监测目标进入预设盲区范围内时,仅反馈一级预警信号。此时,若存在转向意图,则基于车辆的预测轨迹信息和监测目标的位置信息,确定是否反馈二级预警信号,以提示驾驶员是否存在碰撞风险。基于此,车辆能够基于实际情况进行分级预警,从而实现精准预警,降低对于驾驶员正常操作的影响,进而有利于提升车辆驾驶安全性。
- 还没有人留言评论。精彩留言会获得点赞!