估计车辆质量的方法及装置
本技术涉及车辆,特别涉及一种估计车辆质量的方法及装置。
背景技术:
1、相关技术中,通过递推的最小二乘法、卡尔曼滤波以及深度学习进行估计车辆的质量,其中,递推的最小二乘法和卡尔曼滤波主要通过建立车辆纵向动力学模型实现,深度学习为基于数据的方法,通过获取大量的行驶数据进行训练神经网络模型,从而估计车辆的质量。
2、然而,相关技术中由于道路坡度与车辆质量在纵向动力学中高度耦合,需要对道路坡度与车辆的质量同时估计,降低了质量估计的准确性,并且通过行驶数据训练的神经网络模型仅适用于同一种车辆,降低了质量估计的适用性,无法满足车辆的质量估计的需求,亟待解决。
技术实现思路
1、本技术是基于发明人对以下问题和认识作出的:
2、在智能驾驶的规划算法中,获取准确的车辆状态信息对于规划结果的正确与否至关重要,车辆传感器可以获取车辆部分状态信息,但是对于难以直接通过传感器测量的参数,需要状态观测器来获取。
3、车辆状态参数估计技术可以使车辆获得自车行驶状态或者固有参数的信息,之后将该信息用于车辆的控制器中,实现车辆更加准确的控制,车辆质量估计方法是通过车辆传感器获取到的车辆行驶状态信息,对车辆的质量进行估计的方法,通过额外加装传感器来获取行驶中的车辆的质量的成本较为高昂,因此,需要车辆质量估计方法旨在使用车辆自带的传感器获取需要的状态信息,来准确的估计出行驶中车辆的质量。
4、目前主要存在三种方法来进行质量估计:递推的最小二乘法、卡尔曼滤波以及深度学习,递推的最小二乘法和卡尔曼滤波是基于模型的方法,大多数通过建立车辆纵向动力学模型实现,车辆纵向动力学模型中的车辆参数可以通过试验提前获取,但是道路坡度在行驶的过程中一直改变,道路坡度与车辆质量在纵向动力学中高度耦合,两者难以通过简单的方法进行拆解,因此需要对道路坡度与质量同时估计,但是坡度估计的准确性对于质量估计的结果有重大影响,若坡度估计结果不够准确,也将导致质量估计的结果不准确。
5、另外,深度学习的方法是基于数据的方法,深度学习的质量估计方法需要大量的行驶数据进行训练神经网络模型,并且只能针对同一种车型进行估计,当车辆型号改变时,已经训练好的网络模型不再具有适用性,亟需改善。
6、本技术提供一种估计车辆质量的方法及装置,以解决相关技术中由于道路坡度与车辆质量在纵向动力学中高度耦合,需要对道路坡度与车辆的质量同时估计,降低了质量估计的准确性,并且通过行驶数据训练的神经网络模型仅适用于同一种车辆,降低了质量估计的适用性,无法满足车辆的质量估计的需求的问题。
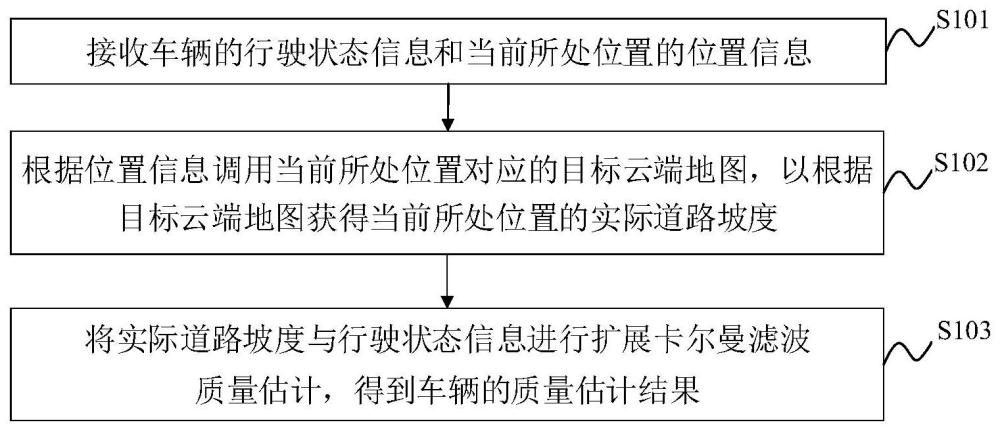
7、本技术第一方面实施例提供一种估计车辆质量的方法,应用于服务器,其中,所述方法包括以下步骤:接收车辆的行驶状态信息和当前所处位置的位置信息;根据所述位置信息调用所述当前所处位置对应的目标云端地图,以根据所述目标云端地图获得所述当前所处位置的实际道路坡度;将所述实际道路坡度与所述行驶状态信息进行扩展卡尔曼滤波质量估计,得到所述车辆的质量估计结果。
8、可选地,在本技术的一个实施例中,所述车辆的行驶状态信息包括车速信号、挡位信号、刹车信号和发动机输出转矩信号中的至少一项。
9、可选地,在本技术的一个实施例中,所述将所述实际道路坡度与所述行驶状态信息进行扩展卡尔曼滤波质量估计,包括:根据预先构建的车辆纵向动力学模型建立所述车辆的状态方程;利用预设前向欧拉算法对所述状态方程进行离散化处理,获得离散化后的状态方程;将所述离散化后的状态方程进行所述扩展卡尔曼滤波质量估计。
10、可选地,在本技术的一个实施例中,所述将所述实际道路坡度与所述行驶状态信息进行扩展卡尔曼滤波质量估计,得到所述车辆的质量估计结果,包括:根据所述状态方程确定先验状态与先验误差协方差矩阵,并根据所述先验误差协方差矩阵获得卡尔曼增益;利用所述先验状态、所述先验误差协方差矩阵和所述卡尔曼增益,确定后验状态与后验误差协方差矩阵,并输出所述车辆的质量估计结果。
11、可选地,在本技术的一个实施例中,所述状态方程为:
12、
13、其中,为车辆加速度,te为发动机输出转矩,ig为变速箱当前挡位传动比,io为主减速器传动比,η为传动系的机械效率,rw为车轮半径,cd为车辆风阻系数,a为车辆迎风面积,ρ为空气密度,v为车速,m为整车质量,g为重力加速度,i为道路坡度,w1为发动机转矩过程噪声,w2为质量过程噪声,为质量变化率。
14、本技术第二方面实施例提供一种估计车辆质量的装置,应用于服务器,其中,所述装置包括:接收模块,用于接收车辆的行驶状态信息和当前所处位置的位置信息;获取模块,用于根据所述位置信息调用所述当前所处位置对应的目标云端地图,以根据所述目标云端地图获得所述当前所处位置的实际道路坡度;处理模块,用于将所述实际道路坡度与所述行驶状态信息进行扩展卡尔曼滤波质量估计,得到所述车辆的质量估计结果。
15、可选地,在本技术的一个实施例中,所述车辆的行驶状态信息包括车速信号、挡位信号、刹车信号和发动机输出转矩信号中的至少一项。
16、可选地,在本技术的一个实施例中,所述处理模块包括:建立单元,用于根据预先构建的车辆纵向动力学模型建立所述车辆的状态方程;获取单元,用于利用预设前向欧拉算法对所述状态方程进行离散化处理,获得离散化后的状态方程;第一处理单元,用于将所述离散化后的状态方程进行所述扩展卡尔曼滤波质量估计。
17、可选地,在本技术的一个实施例中,所述处理模块包括:确定单元,用于根据所述状态方程确定先验状态与先验误差协方差矩阵,并根据所述先验误差协方差矩阵获得卡尔曼增益;第二处理单元,用于利用所述先验状态、所述先验误差协方差矩阵和所述卡尔曼增益,确定后验状态与后验误差协方差矩阵,并输出所述车辆的质量估计结果。
18、可选地,在本技术的一个实施例中,所述状态方程为:
19、
20、其中,为车辆加速度,te为发动机输出转矩,ig为变速箱当前挡位传动比,io为主减速器传动比,η为传动系的机械效率,rw为车轮半径,cd为车辆风阻系数,a为车辆迎风面积,ρ为空气密度,v为车速,m为整车质量,g为重力加速度,i为道路坡度,w1为发动机转矩过程噪声,w2为质量过程噪声,为质量变化率。
21、本技术第三方面实施例提供一种服务器,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的估计车辆质量的方法。
22、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的估计车辆质量的方法。
23、本技术实施例可以根据车辆当前所处位置的位置信息调用当前所处位置对应的目标云端地图,以根据目标云端地图获得当前所处位置的实际道路坡度,将实际道路坡度与行驶状态信息进行扩展卡尔曼滤波质量估计,得到车辆的质量估计结果,有效的提升了质量估计的准确性和适用性。由此,解决了相关技术中需要对道路坡度与车辆的质量同时估计,降低了质量估计的准确性,并且通过行驶数据训练的神经网络模型仅适用于同一种车辆,降低了质量估计的适用性,无法满足车辆的质量估计的需求的问题。
24、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!