一种应用于车辆后方防追尾预警的辅助驾驶系统的制作方法
本发明涉及智能驾驶主动安全领域,具体涉及一种应用于车辆后方防追尾预警的辅助驾驶系统。
背景技术:
1、随着智能驾驶技术的发展,主动安全设备应用越来越广泛,对车辆驾驶过程中的安全性也起到了非常大的作用;目前主要集中在前向,对于车辆后方防追尾预警的研究很少。
2、众所周知,工程维修车辆主要负责路面检修、道路养护、障碍物清理等功能,经常需要以较低速度行驶在高速公路上,而后方车辆的速度一般是速度很快的,此时如果有后方车辆在本车道快速靠近时,会有很大的碰撞风险。
3、如何对潜在的追尾风险进行警示是现阶段亟需解决的技术难题。
4、公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、为解决上述技术问题,本发明提出了一种应用于车辆后方防追尾预警的辅助驾驶系统,以达到实现对后方车辆的行进进行监测、降低追尾事故的发生和提升行驶安全的目的。
2、为达到上述目的,本发明的技术方案如下:
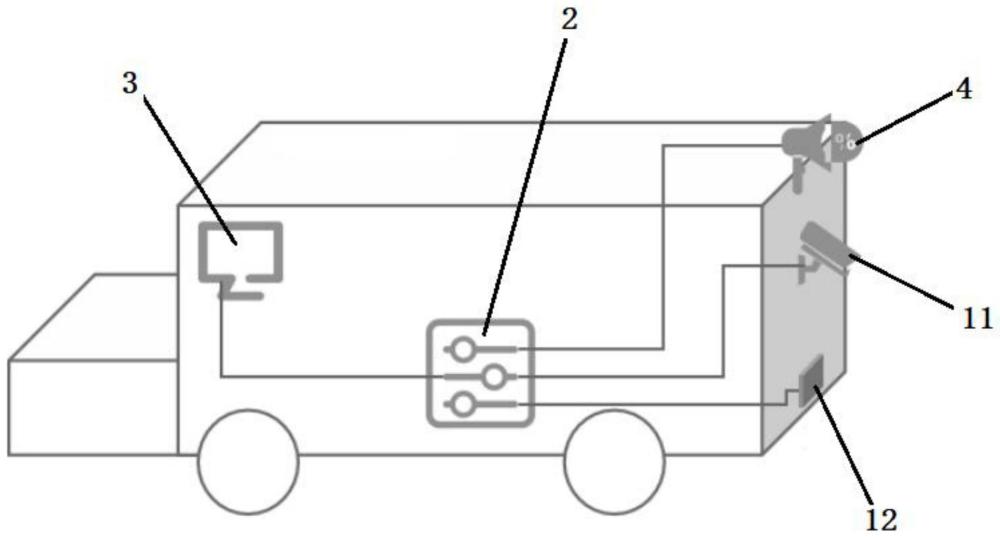
3、一种应用于车辆后方防追尾预警的辅助驾驶系统,包含有设置在车体上的传感器组件、设置在车内的控制器和设置在车内的显示组件;
4、所述传感器组件包含有设置在车辆后挡风玻璃中间位置上的视觉传感器和设置在车辆后方中间位置的毫米波雷达;所述视觉传感器将检测到的车道线数据、车辆静态数据发送给控制器,所述毫米波雷达将检测到的目标运动状态数据发送给所述控制器;
5、所述控制器安装在车内电器仓内,所述控制器用于接收所述视觉传感器和毫米波雷达将检测到的数据,并根据该数据以及内置在控制器内的数据模型来计算的得出当前的交通状况,同时将接收到处理结果发送至所述显示组件进行显示;
6、所述显示组件包含有设置在所述车辆仪表台的显示屏,所述显示屏用于接收控制器发出的指令并进行显示。
7、本发明通过设置在车辆后挡风玻璃中间位置上的视觉传感器和设置在车辆后方中间位置的毫米波雷达组成的传感器组件检测车辆后方的交通状况参数并将该参数发送至控制器,由控制器根据相应的模型分析得出当前具体情况并作出预判,同时将结果发送至显示组件进行显示,达到实现对后方车辆的行进进行监测、降低追尾事故的发生和提升行驶安全的目的。
8、进一步优选的,还包含有设置在所述车辆仪表台上的车内蜂鸣器和安装在车辆尾部上方的车外预警喇叭,所述车内蜂鸣器和车外预警喇叭均与所述控制器相连接,并根据控制器发出指令进行工作。
9、进一步优选的,所述视觉传感器采用主动近红外全天候感知摄像头,其探测距离200米;所述毫米波雷达采用77ghz远距离探测雷达,其探测距离为200米。
10、进一步优选的,所述主动近红外全天候感知摄像头的标定如下:
11、将车辆停靠在两条车道线中间,车辆行驶方向与车道线平行,通过摄像头焦距f以及车道线在图像中的最远消失点其中(xv,yv),计算摄像头安装的俯仰角pitch和横摆角yaw,公式如下:
12、
13、其中(xc,yc)为图像的中心点坐标;
14、所述77ghz远距离探测雷达的标定如下:
15、在车辆中轴线正前方放置雷达角反射器,并读取雷达探测到的角反射器横向距离,如果横向距离不为0,则调整雷达角度,直至横向距离为0,毫米波雷达标定完成。
16、进一步优选的,所述主动近红外全天候感知摄像头采用yolo目标检测模型,实时检测图像中车辆的矩形框位置,并基于标定参数以及单目测距技术,计算目标相对距离和相对速度。
17、进一步优选的,所述主动近红外全天候感知摄像头和所述77ghz远距离探测雷达识别的目标加入目标列表,记为obj{1…k},其中,k表示目标数量。
18、进一步优选的,所述主动近红外全天候感知摄像头采用icnet语义分割模型以获得图像中车道线的像素位置的这一方式来识别车道线,且所述主动近红外全天候感知摄像头主要识别自车车道两侧车道线,并基于标定参数以及单目测距技术,计算每个像素点的横纵向距离,获取相应车道线的相对位置。
19、本发明具有如下优点:
20、1.本发明通过设置在车辆后挡风玻璃中间位置上的视觉传感器和设置在车辆后方中间位置的毫米波雷达组成的传感器组件检测车辆后方的交通状况参数并将该参数发送至控制器,由控制器根据相应的模型分析得出当前具体情况并作出预判,同时将结果发送至显示组件进行显示,达到实现对后方车辆的行进进行监测、降低追尾事故的发生和提升行驶安全的目的。
技术特征:
1.一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,包含有设置在车体上的传感器组件、设置在车内的控制器和设置在车内的显示组件;
2.根据权利要求1所述的一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,还包含有设置在所述车辆仪表台上的车内蜂鸣器和安装在车辆尾部上方的车外预警喇叭,所述车内蜂鸣器和车外预警喇叭均与所述控制器相连接,并根据控制器发出指令进行工作。
3.根据权利要求1所述的一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,所述视觉传感器采用主动近红外全天候感知摄像头,其探测距离200米;所述毫米波雷达采用77ghz远距离探测雷达,其探测距离为200米。
4.根据权利要求3所述的一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,所述主动近红外全天候感知摄像头的标定如下:
5.根据权利要求3所述的一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,所述主动近红外全天候感知摄像头采用yolo目标检测模型,实时检测图像中车辆的矩形框位置,并基于标定参数以及单目测距技术,计算目标相对距离和相对速度。
6.根据权利要求3所述的一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,所述主动近红外全天候感知摄像头和所述77ghz远距离探测雷达识别的目标加入目标列表,记为obj{1…k},其中,k表示目标数量。
7.根据权利要求3所述的一种应用于车辆后方防追尾预警的辅助驾驶系统,其特征在于,所述主动近红外全天候感知摄像头采用icnet语义分割模型以获得图像中车道线的像素位置的这一方式来识别车道线,且所述主动近红外全天候感知摄像头主要识别自车车道两侧车道线,并基于标定参数以及单目测距技术,计算每个像素点的横纵向距离,获取相应车道线的相对位置。
技术总结
本发明公开了一种应用于车辆后方防追尾预警的辅助驾驶系统,包含有设置在车体上的传感器组件、设置在车内的控制器和设置在车内的显示组件;所述传感器组件包含有视觉传感器和毫米波雷达;所述控制器用于接收所述视觉传感器和毫米波雷达将检测到的数据,并根据该数据计算的得出当前的交通状况,将接收到处理结果发送至所述显示组件进行显示。通过视觉传感器和毫米波雷达组成的传感器组件检测车辆后方的交通状况参数并将该参数发送至控制器,由控制器根据相应的模型分析得出当前具体情况并作出预判,同时将结果发送至显示组件进行显示,达到实现对后方车辆的行进进行监测、降低追尾事故的发生和提升行驶安全的目的。
技术研发人员:吴晓闯,孙长亮
受保护的技术使用者:昆山星际舟智能科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!