一种车辆扰动控制方法、装置、设备及存储介质与流程
本技术涉及智能驾驶,尤其涉及一种车辆扰动控制方法、装置、设备及存储介质。
背景技术:
1、随着控制技术的飞速发展,智能驾驶技术已在车辆行业中得到广泛商用,其成熟度也在几年的迭代更新中越来越高,但由于车辆自身结构、部件的复杂性和道路状况的不确定性,车辆在行驶过程中会遇到时变的扰动,包括内扰和外扰。这些扰动会影响到操纵稳定性,给司机带来不舒适的驾乘体验;扰动还会影响智能驾驶策略的判断与执行,除了可能造成车辆行驶不稳定,还可能会造成控制程序失效,严重的会影响行车安全。故车辆行驶中的抗干扰性能关乎车辆平稳运行和安全性。
2、对扰动进行建模并进行控制消除是抗干扰的有效方法之一。车辆有惯性、弹簧和阻尼等多种力学特点,是个多自由度动力学系统,且参与车辆运动(驱动,制动和转向)的部件,如轮胎、转向系统等具有非线性特性,另外车辆由于需要经常运行在各种工况下,且由于载货量导致车重变化较大,较多部件相关参数为时变量,以上原因导致车辆的扰动难以精准建模。
3、现有技术中,由于对车辆扰动的建模精度不高,严重影响了车辆抗扰性能,导致车辆智能驾驶中稳定性和安全性较差。
技术实现思路
1、本技术提供一种车辆扰动控制方法、装置、设备及存储介质,用以解决现有技术中由于对车辆扰动的建模精度不高,严重影响了车辆抗扰性能,导致车辆智能驾驶中稳定性和安全性较差的技术问题。
2、第一方面,本技术提供一种车辆扰动控制方法,所述方法包括:
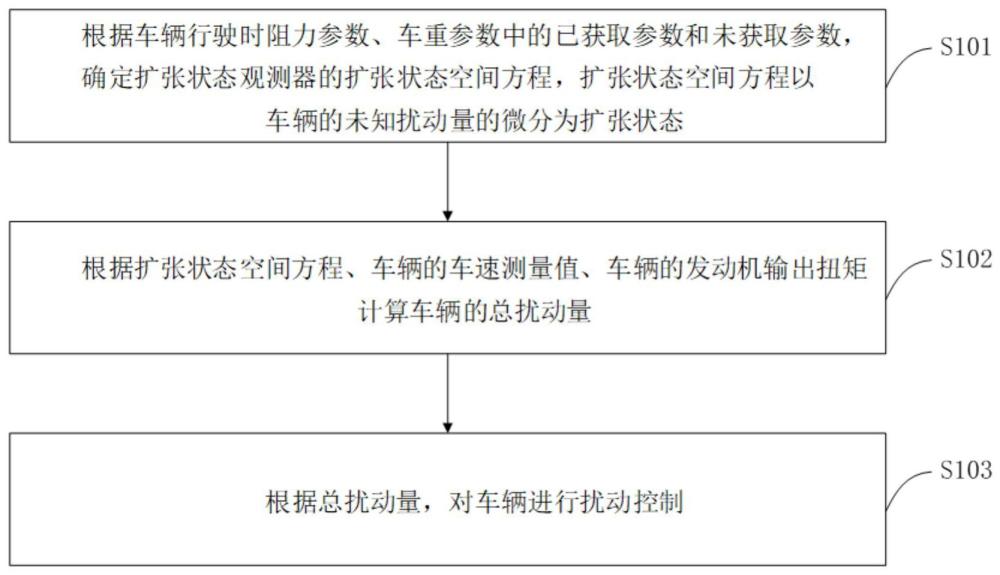
3、根据所述车辆行驶时阻力参数、车重参数中的已获取参数和未获取参数,确定扩张状态观测器的扩张状态空间方程,所述扩张状态空间方程以所述车辆的未知扰动量为扩张状态;
4、根据所述扩张状态空间方程、所述车辆的车速测量值、所述车辆的发动机输出扭矩计算所述车辆的总扰动量;
5、根据所述总扰动量,对所述车辆进行扰动控制。
6、一种可能的设计中,所述根据所述车辆行驶时阻力参数、车重参数中的已获取参数和未获取参数,确定扩张状态观测器的扩张状态空间方程,包括:
7、若所述阻力参数、车重参数中的已获取参数和未获取参数中,所述阻力参数、所述车重参数为所述未获取参数,则将第一表达式确定为所述扩张状态观测器的扩张状态空间方程,所述第一表达式为:
8、
9、其中,v为所述车辆的车速测量值,y为所述车辆的实际车速值,z1为所述车辆的车速估计值,f1为所述未知扰动量,为所述车速估计值的微分,为所述未知扰动量的微分,β01、β02为所述扩张状态观测器的增益参数,u为所述车辆的发动机输出扭矩,b0为b的估计值,并且
10、
11、其中,m为所述车辆的车重估计值,并且,
12、
13、其中,i1为所述车辆的变速器传动比,i0为所述车辆的主减速器传动比,ηt为所述车辆的传动效率,rr为所述车辆的车轮半径。
14、一种可能的设计中,所述根据所述车辆行驶时阻力参数、车重参数中的已获取参数和未获取参数,确定扩张状态观测器的扩张状态空间方程,包括:若所述阻力参数、车重参数中的已获取参数和未获取参数中,所述车辆的坡道阻力值、所述车辆的滚动阻力值、所述车辆的制动力中的若干种阻力参数以及所述车重参数为已获取参数,则将第二表达式确定为所述扩张状态观测器的扩张状态空间方程,所述第二表达式为:
15、
16、其中,v为车辆的车速测量值,y为车辆的实际车速值,z1为车辆的车速估计值,f2为未知扰动量,为车速估计值的微分,为未知扰动量的微分,β01、β02为扩张状态观测器的增益参数,u为车辆的发动机输出扭矩,b0为b的估计值。
17、其中,v为所述车辆的车速测量值,y为所述车辆的实际车速值,z1为所述车辆的车速估计值,f2为所述未知扰动量,为所述车速估计值的微分,为所述未知扰动量的微分,β01、β02为所述扩张状态观测器的增益参数,u为所述车辆的发动机输出扭矩,b0为b的估计值,并且
18、
19、其中,m为所述车重参数,并且,
20、
21、其中,i1为所述车辆的变速器传动比,i0为所述车辆的主减速器传动比,ηt为所述车辆的传动效率,rr为所述车辆的车轮半径。
22、一种可能的设计中,所述根据所述车辆行驶时阻力参数、车重参数中的已获取参数和未获取参数,确定扩张状态观测器的扩张状态空间方程,包括:
23、若所述阻力参数、车重参数中的已获取参数和未获取参数中,所述车辆的风阻参数以及所述车重参数为已获取参数,则将第三表达式确定为所述扩张状态观测器的扩张状态空间方程,所述第三表达式为:
24、
25、其中,v为所述车辆的车速测量值,y为所述车辆的实际车速值,为y的微分,z1为所述车辆的车速估计值,f3为所述未知扰动量,为所述车速估计值的微分,为所述未知扰动量的微分,β01、β02为所述扩张状态观测器的增益参数,u为所述车辆的发动机输出扭矩,b0为b的估计值,并且
26、
27、其中,m为所述车重参数,并且,
28、
29、其中,i1为所述车辆的变速器传动比,i0为所述车辆的主减速器传动比,ηt为所述车辆的传动效率,rr为所述车辆的车轮半径,并且,
30、
31、其中,cd为所述车辆的空气阻力系数,a为所述车辆的迎风面积。
32、一种可能的设计中,所述根据所述扩张状态空间方程、所述车辆的车速测量值、所述车辆的发动机输出扭矩计算所述车辆的总扰动量,包括:
33、根据所述车辆轮速传感器测得的轮速数据计算所述车辆的车速测量值,根据所述车辆发动机的ecu报文获取所述车辆的发动机输出扭矩;
34、根据所述第一表达式,对所述车速估计值的微分、所述未知扰动量的微分进行积分,将计算出的所述未知扰动量作为所述总扰动量。
35、一种可能的设计中,所述根据所述扩张状态空间方程、所述车辆的车速测量值、所述车辆的发动机输出扭矩计算所述车辆的总扰动量,包括:
36、根据所述车辆轮速传感器测得的轮速数据计算所述车辆的车速测量值,根据所述车辆发动机的ecu报文获取所述车辆的发动机输出扭矩;
37、根据所述第二表达式,对所述车速估计值的微分、所述未知扰动量的微分进行积分,计算出所述未知扰动量;
38、将所述未知扰动量与所述车辆已获取的所述阻力参数相加,计算出所述总扰动量。
39、一种可能的设计中,所述根据所述扩张状态空间方程、所述车辆的车速测量值、所述车辆的发动机输出扭矩计算所述车辆的总扰动量,包括:
40、根据所述车辆轮速传感器测得的轮速数据计算所述车辆的车速测量值,根据所述车辆发动机的ecu报文获取所述车辆的发动机输出扭矩;
41、根据所述第三表达式,对所述车速估计值的微分、所述未知扰动量的微分进行积分,将计算出的所述未知扰动量作为所述总扰动量。
42、第二方面,本技术提供一种车辆扰动控制装置,包括:
43、第一模块,用于根据所述车辆行驶时阻力参数、车重参数中的已获取参数和未获取参数,确定扩张状态观测器的扩张状态空间方程,所述扩张状态空间方程以所述车辆的未知扰动量的微分为扩张状态;
44、第二模块,用于根据所述扩张状态空间方程、所述车辆的车速测量值、所述车辆的发动机输出扭矩计算所述车辆的总扰动量;
45、第三模块,根据所述总扰动量,对所述车辆进行扰动控制。
46、第三方面,本技术提供一种车辆扰动控制电子设备,所述设备包括:处理器,以及与所述处理器通信连接的存储器;
47、所述存储器存储计算机执行指令;
48、所述处理器执行所述存储器存储的计算机执行指令,以实现如上所述的车辆扰动控制方法。
49、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如上所述的车辆扰动控制方法。
50、本技术提供的一种车辆扰动控制方法、装置、设备及存储介质,利用扩张状态观测器,仅需要少量的已获取参数实现对车辆总扰动量的建模,进而实现对车辆总扰动量的观测估计,符合车辆行驶时有较多未获取参数的实际,精度较高;扩张状态观测器以车辆的未知扰动作为扩张状态,为车辆扰动建模增加了已获取信息,从而提高了车辆总扰动量的估算精度。在计算出车辆的总扰动量后,根据总扰动量对车辆进行扰动控制,可以提高车辆行驶的稳定性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!