用于控制高空作业车行驶的方法、处理器及高空作业车与流程
本申请涉及高空作业平台,具体地涉及一种用于控制高空作业车行驶的方法、处理器及高空作业车。
背景技术:
1、超高米段高空作业车是服务于高米段高空作业、设备安装、检修等可移动性高空作业的关键装备,其中x形支腿四轮转向差速的控制精度不仅直接影响作业人员的操作体验,还与作业安全紧密相关。若转向差速控制效果较差,不仅会降低操作体验,严重时还会导致轮胎打滑、平台晃动严重。随着超高米段的高空作业车的发展,对四轮转向差速控制的响应性、工况适应性和控制精度提出了更高的要求。针对前述问题,现有技术通过在转向行驶时保证各轮的速度比等于各轮的转向半径比来实现差速控制。然而,由于x型支腿的结构自由度增加、车体刚性变差,以及机械误差、液压系统响应和地面情况复杂等因素的影响,使得现有控制方式容易造成驱动轮磨胎严重且行驶稳定性变差,其控制效果较差,因而对操作者的安全体验和作业效率产生较大影响。
技术实现思路
1、本申请实施例的目的是提供一种用于控制高空作业车行驶的方法、处理器及高空作业车,用以解决现有技术的控制方式容易造成驱动轮磨胎严重且行驶稳定性变差,进而导致操作者的安全体验和作业效率较低的问题。
2、为了实现上述目的,本申请实施例第一方面提供一种用于控制高空作业车行驶的方法,包括:
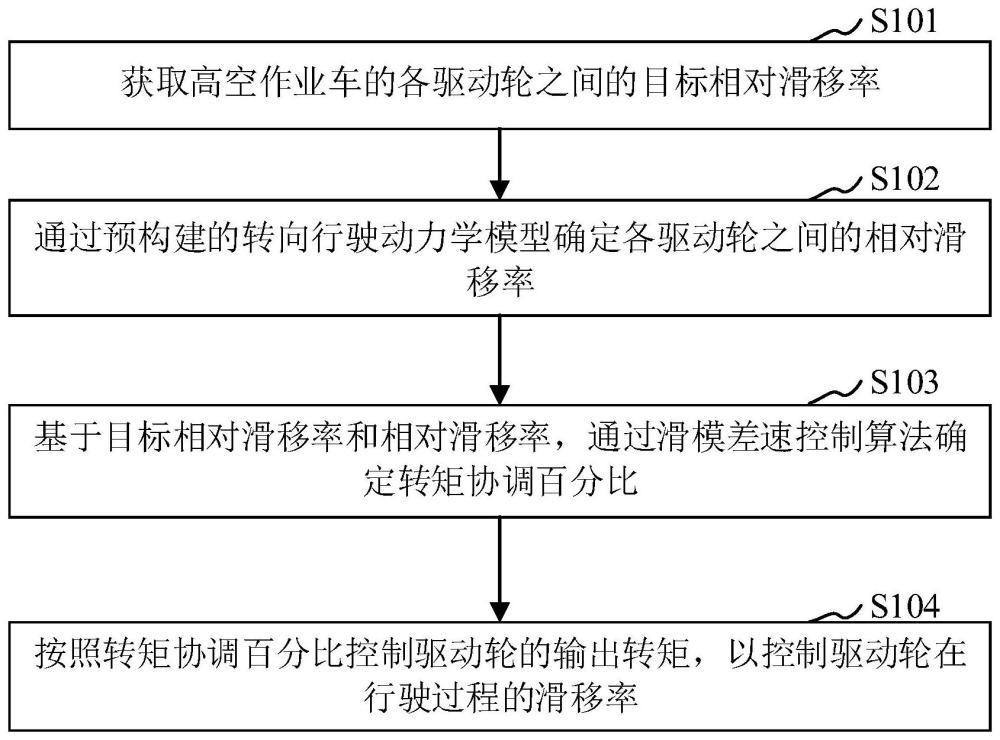
3、获取高空作业车的各驱动轮之间的目标相对滑移率;
4、通过预构建的转向行驶动力学模型确定各驱动轮之间的相对滑移率;
5、基于目标相对滑移率和相对滑移率,通过滑模差速控制算法确定转矩协调百分比;
6、按照转矩协调百分比控制驱动轮的输出转矩,以控制驱动轮在行驶过程的滑移率。
7、在本申请实施例中,基于目标相对滑移率和相对滑移率,通过滑模差速控制算法确定转矩协调百分比,包括:根据目标相对滑移率和相对滑移率确定滑模逼近面;结合滑模逼近面和预设滑模控制律确定转矩协调百分比。
8、在本申请实施例中,根据目标相对滑移率和相对滑移率确定滑模逼近面,包括:根据目标相对滑移率和相对滑移率的差值确定第一系统误差状态;对目标相对滑移率进行求导,以得到第一求导结果;对相对滑移率进行求导,以得到第二求导结果;根据第一求导结果和第二求导结果的差值确定第二系统误差状态;根据第一系统误差状态和第二系统误差状态确定滑模逼近面。
9、在本申请实施例中,滑模逼近面满足公式(1):
10、
11、其中,s为滑模逼近面,c为与高空作业车特性和实际工况相关的系数矩阵,e为第一系统误差状态,为第二系统误差状态。
12、在本申请实施例中,转向行驶动力学模型满足公式(2):
13、
14、其中,p为与高空作业车的转向系统结构参数相关的第一系数矩阵,q为与高空作业车的转向系统结构参数相关的第二系数矩阵,s为与高空作业车的转向系统结构参数相关的第三系数矩阵,x为速度参数矩阵,为速度参数矩阵的求导结果,u为转向输入参数矩阵,δ为车轮转向角度,ks为转矩协调百分比,u为高空作业车的纵向速度,v为高空作业车的侧向速度,r为高空作业车的横摆角速度,ωrf、ωrr、ωlf和ωlr为高空作业车的车轮分别对应的实际转速。
15、在本申请实施例中,转向行驶动力学模型的构建包括:构建高空作业车的初始转向行驶动力学模型;对初始转向行驶动力学模型进行线性等效处理,以构建转向行驶动力学模型。
16、在本申请实施例中,初始转向行驶动力学模型满足公式(3):
17、
18、其中,ax为高空作业车的纵向加速度,ay为高空作业车的侧向加速度,m为高空作业车的重量,cd为空气阻力系数,ad为迎风面积,p为空气密度,u为高空作业车的纵向速度,i为高空作业车的横摆转动惯量,γ为高空作业车的横摆角速度,fxrf、fxrr、fxlf和fxlr为高空作业车的车轮在纵向上分别对应的分力,fyrf、fyrr、fylf和fylr为高空作业车的车轮在侧向上分别对应的分力,a为高空作业车质心到前轴的距离,b为高空作业车质心到后轴的距离,d为高空作业车的前后轮距。
19、本申请实施例第二方面提供一种处理器,被配置成执行上述的用于控制高空作业车行驶的方法。
20、本申请实施例第三方面提供一种高空作业车,包括:驱动轮;以及处理器。
21、本申请实施例第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行上述的用于控制高空作业车行驶的方法。
22、上述技术方案,通过获取高空作业车的各驱动轮之间的目标相对滑移率,以及通过预构建的转向行驶动力学模型确定各驱动轮之间的相对滑移率,进而基于目标相对滑移率和相对滑移率通过滑模差速控制算法确定转矩协调百分比,并按照转矩协调百分比控制驱动轮的输出转矩,以控制驱动轮在行驶过程的滑移率。本申请通过转向行驶动力学模型确定各驱动轮之间的相对滑移率,并基于目标相对滑移率和相对滑移率通过滑模差速控制算法确定转矩协调百分比,进而根据转矩协调百分比控制驱动轮的输出转矩,可以使得各驱动轮之间的相对滑移率达到理想的目标相对滑移率,以减少轮胎磨损,提高高空作业车的稳定性,提升操作者的安全体验和作业效率。
23、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于控制高空作业车行驶的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述目标相对滑移率和所述相对滑移率,通过滑模差速控制算法确定转矩协调百分比,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述目标相对滑移率和所述相对滑移率确定滑模逼近面,包括:
4.根据权利要求3所述的方法,其特征在于,所述滑模逼近面满足公式(1):
5.根据权利要求1所述的方法,其特征在于,所述转向行驶动力学模型满足公式(2):
6.根据权利要求1所述的方法,其特征在于,所述转向行驶动力学模型的构建包括:
7.根据权利要求6所述的方法,其特征在于,所述初始转向行驶动力学模型满足公式(3):
8.一种处理器,被配置成执行根据权利要求1至7中任一项所述的用于控制高空作业车行驶的方法。
9.一种高空作业车,其特征在于,包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至7中任一项所述的用于控制高空作业车行驶的方法。
技术总结
本申请公开了一种用于控制高空作业车行驶的方法、处理器及高空作业车,属于高空作业平台技术领域。该方法包括:获取高空作业车的各驱动轮之间的目标相对滑移率;通过预构建的转向行驶动力学模型确定各驱动轮之间的相对滑移率;基于目标相对滑移率和相对滑移率,通过滑模差速控制算法确定转矩协调百分比;按照转矩协调百分比控制驱动轮的输出转矩,以控制驱动轮在行驶过程的滑移率。本申请能减少轮胎磨损,提高高空作业车的稳定性,进而提升操作者的安全体验和作业效率。
技术研发人员:朱后,蒋文杰,熊路
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!